光学单元、摄影装置及摄影系统的制作方法
1.本发明涉及一种光学单元,该光学单元具备可动体和固定体,该可动体具有摄像头模块等光学模块,该固定体可转动地保持可动体。另外,本发明涉及具备该光学单元的摄影装置及摄影系统。
背景技术:
2.以往,已知具有用于修正光学像的抖动的抖动修正功能的带抖动修正功能的光学单元(例如,参照专利文献1)。专利文献1所记载的带抖动修正功能的光学单元具备:保持光学模块的可动体;保持可动体的固定体;使可动体相对于固定体转动的磁驱动机构;以及连接可动体和固定体的板状的弹簧部件。磁驱动机构具备板状的磁铁和与磁铁相对的线圈。
3.在专利文献1所记载的带抖动修正功能的光学单元中,固定体经由万向架机构保持可动体,可动体相对于固定体能够进行以与光学模块的光轴方向正交的x轴方向为转动的轴向的转动、以及以与光轴方向和x轴方向正交的y轴方向为转动的轴向的转动。弹簧部件起到在磁驱动机构停止时规定可动体相对于固定体的姿势的作用,在磁驱动机构停止时,可动体通过弹簧部件的作用力而相对于固定体配置在规定的原点位置(基准位置)。
4.在专利文献1所记载的带抖动修正功能的光学单元中,例如,与线圈相对的磁铁的相对面为凸曲面,与磁铁相对的线圈的相对面为凹曲面。因此,在该带抖动修正功能的光学单元中,即使可动体相对于固定体的转动角度变大,也能够将磁铁与线圈之间的距离保持为恒定,其结果是,即使可动体相对于固定体的转动角度变大,也能够抑制磁驱动机构的驱动力的降低。现有技术文献专利文献
5.专利文献1:日本特开2016-99503号公报
技术实现要素:
6.在专利文献1所记载的带抖动修正功能的光学单元中,如上所述,即使可动体相对于固定体的转动角度变大,也能够抑制磁驱动机构的驱动力的降低。另外,在该带抖动修正功能的光学单元的情况下,在磁驱动机构停止时,可动体配置在原点位置,可动体相对于固定体从原点位置开始移动的情况较多。因此,在该带抖动修正功能的光学单元中,优选配置于原点位置的可动体相对于固定体更容易移动。
7.因此,本发明的技术问题在于提供一种光学单元,该光学单元具备:具有光学模块的可动体;将可动体保持为能够转动的固定体;以及使可动体相对于固定体转动的驱动机构,其中,即使可动体相对于固定体的转动角度变大,也能够抑制驱动机构的驱动力的降低,并且能够使配置在规定的原点位置的可动体相对于固定体更容易移动。另外,本发明的技术问题在于提供具备这样的光学单元的摄影装置以及摄影系统。
8.为了解决上述技术问题,本发明的光学单元的特征在于,具备:可动体,其具有光
学模块;固定体,其将可动体保持为能够转动;以及驱动机构,其将与光学模块的光轴正交的第一方向作为转动的轴向,使可动体相对于固定体转动,驱动机构具备:驱动用线圈,其卷绕成空心状;以及驱动用磁铁,其在以可动体相对于固定体的转动中心为中心的径向上与驱动用线圈相对配置,驱动用磁铁的与驱动用线圈相对的相对面即磁铁侧相对面形成为在从第一方向观察时以可动体的转动中心为曲率中心的圆弧状,驱动用线圈具备与第一方向平行的一对有效边部,并且沿着从第一方向观察时的形状呈圆弧状的磁铁侧相对面弯曲,一对有效边部以在以可动体的转动中心为中心的周向上隔开间隔的状态配置,在从第一方向观察时,与磁铁侧相对面相对的有效边部的相对面即有效边部侧相对面与以可动体的转动中心为中心的径向大致正交,驱动用磁铁被磁化成,在可动体相对于固定体配置于规定的原点位置的状态下从第一方向观察时,通过有效边部侧相对面的中心的磁力线与有效边部侧相对面大致正交。
9.在本发明的光学单元中,与驱动用线圈相对的驱动用磁铁的相对面即磁铁侧相对面形成为从第一方向观察时以可动体的转动中心为曲率中心的圆弧状,驱动用线圈具备与第一方向平行的一对有效边部,并且沿着从第一方向观察时的形状呈圆弧状的磁铁侧相对面弯曲。另外,在本发明中,从第一方向观察时,与磁铁侧相对面相对的有效边部的相对面即有效边部侧相对面与以可动体的转动中心为中心的径向大致正交。因此,在本发明中,即使可动体相对于固定体的转动角度变大,也能够将驱动用磁铁的磁铁侧相对面与驱动用线圈的有效边部侧相对面之间的距离保持为恒定。因此,在本发明中,即使可动体相对于固定体的转动角度变大,也能够抑制驱动机构的驱动力的降低。
10.另外,在本发明中,驱动用磁铁被磁化成,在可动体相对于固定体配置于规定的原点位置的状态下从第一方向观察时,通过与以可动体的转动中心为中心的径向大致正交的有效边部侧相对面的中心的磁力线与有效边部侧相对面大致正交。因此,在本发明中,在可动体配置于原点位置的状态下向驱动用线圈提供电流时,能够提高驱动机构的作用于磁铁侧相对面的切线方向的驱动力。因此,在本发明中,能够使配置于原点位置的可动体相对于固定体更容易移动。
11.在本发明中,若将一对有效边部中的一方的有效边部设为第一有效边部,将另一方的有效边部设为第二有效边部,将第一有效边部的有效边部侧相对面设为第一有效边部侧相对面,将第二有效边部的有效边部侧相对面设为第二有效边部侧相对面,则例如驱动用磁铁由第一磁铁部和第二磁铁部构成,所述第一磁铁部在以可动体的转动中心为中心的周向上配置于第一有效边部侧,所述第二磁铁部在以可动体的转动中心为中心的周向上配置于第二有效边部侧,第一磁铁部的磁铁侧相对面的磁极与第二磁铁部的磁铁侧相对面的磁极成为不同的磁极,第一磁铁部被磁化成,在可动体相对于固定体配置于原点位置的状态下,通过第一有效边部侧相对面的磁力线与第一有效边部侧相对面大致正交,第二磁铁部被磁化成,在可动体相对于固定体配置于原点位置的状态下,通过第二有效边部侧相对面的磁力线与第二有效边部侧相对面大致正交。
12.在该情况下,与以磁力线形成以可动体的转动中心为中心的放射状的方式对第一磁铁部和第二磁铁部进行磁化的情况相比,即使驱动用磁铁的形状成为复杂的形状,也能够比较容易地对驱动用磁铁进行磁化。
13.在本发明中,光学单元例如具备用于维持可动体配置于原点位置的状态的位置保
持机构。
14.在本发明中,例如,驱动用磁铁固定于可动体,驱动用线圈固定于固定体,且在以可动体的转动中心为中心的径向上配置于驱动用磁铁的外侧。
15.在本发明中,优选可动体具备用于规定可动体的转动中心的规定部件,在驱动用磁铁上形成有用于将驱动用磁铁相对于可动体定位的定位用凹部,在规定部件上形成有与定位用凹部卡合而将驱动用磁铁相对于可动体定位的卡合部。若这样构成,则通过用于规定可动体的转动中心的规定部件与驱动用磁铁直接卡合,驱动用磁铁相对于可动体被定位,因此,能够抑制驱动用磁铁相对于可动体的转动中心的位置偏移。因此,即使驱动用磁铁的磁铁侧相对面与驱动用线圈的有效边部侧相对面的距离变短,也能够防止可动体相对于固定体转动时的磁铁侧相对面与有效边部侧相对面的干涉。
16.在本发明中,例如光学模块是摄像头模块,定位用凹部形成在驱动用磁铁的可动体侧的面的中心。在该情况下,能够减弱驱动用磁铁的可动体侧的面的中心部分的磁通。因此,例如即使摄像头模块具备自动聚焦用的磁驱动机构,也能够抑制该磁驱动机构与光学单元的驱动机构的磁干涉。
17.在本发明中,优选在固定体上形成有保护壁部,该保护壁部在以可动体的转动中心为中心的周向上配置于驱动用线圈的两侧,保护壁部在以可动体的转动中心为中心的径向上配置于比驱动用线圈靠驱动用磁铁侧的位置。若这样构成,则例如即使对光学单元施加冲击,对可动体作用过剩的力,可动体相对于固定体移动,也能够防止驱动用磁铁与驱动用线圈的接触。因此,即使过剩的力作用于可动体而使可动体相对于固定体移动,也能够防止驱动用磁铁及驱动用线圈的损伤。
18.在本发明中,光学单元例如具备安装在固定体上的惯性传感器,驱动机构根据惯性传感器的检测结果使可动体转动。在该情况下,能够基于惯性传感器的检测结果使可动体转动,以使光学模块朝向固定体倾斜的方向。
19.本发明的光学单元例如能够用于车载用的摄影装置,在该摄影装置中,光学模块是摄像头模块。即,本发明的光学单元例如能够用于驾驶记录仪。在该摄影装置(驾驶记录仪)中,能够基于惯性传感器的检测结果使可动体转动,以使摄像头模块的光轴方向始终朝向车辆的行进方向。因此,例如能够取得车辆在交叉路口转弯过程中的车辆的行进方向的图像。其结果是,例如即使在车辆在交叉路口转弯后发生了碰撞事故,也能够基于由摄影装置取得的图像,掌握从事故发生的稍前到事故发生为止的状况。
20.本发明的光学单元例如能够用于车载用的摄影装置,该摄影装置具备配置在光学单元的外部的惯性传感器以及与惯性传感器及驱动用线圈电连接的控制部,在该摄影装置中,光学模块是摄像头模块,控制部基于惯性传感器的检测结果控制向驱动用线圈提供的电流,使可动体转动。
21.即,本发明的光学单元例如能够用于驾驶记录仪。在该摄影装置中,能够基于惯性传感器的检测结果使可动体转动,以使摄像头模块的光轴方向始终朝向车辆的行进方向。因此,例如能够取得车辆在交叉路口转弯过程中的车辆的行进方向的图像。其结果是,例如即使在车辆在交叉路口转弯后发生了碰撞事故,也能够基于由摄影装置取得的图像,掌握从事故发生的稍前到事故发生为止的状况。
22.本发明的光学单元例如能够用于摄影系统,该摄影系统具备:具有该光学单元的
车载用的摄影装置;以及检测车辆的转向角度的转向角度检测器,在该摄影系统中,光学模块是摄像头模块,摄影装置具备电连接转向角度检测器和驱动用线圈的控制部,控制部基于转向角度检测器的检测结果控制向驱动用线圈提供的电流,使可动体转动。
23.即,本发明的光学单元例如能够用于具有驾驶记录仪的摄影系统。在该摄影系统中,能够基于转向角度检测器的检测结果使可动体转动,以使摄像头模块的光轴方向始终朝向车辆的行进方向。因此,例如能够取得车辆在交叉路口转弯过程中的车辆的行进方向的图像。其结果是,例如即使在车辆在交叉路口转弯后发生了碰撞事故,也能够基于由摄影装置取得的图像,掌握从事故发生的稍前到事故发生为止的状况。发明效果
24.如上所述,在本发明中,在具备具有光学模块的可动体、将可动体保持为能够转动的固定体、使可动体相对于固定体转动的驱动机构的光学单元中,即使可动体相对于固定体的转动角度变大,也能够抑制驱动机构的驱动力的降低,并且能够使配置在规定的原点位置的可动体相对于固定体更容易移动。
附图说明
25.图1是本发明实施方式的光学单元的立体图。图2是图1所示的光学单元的分解立体图。图3是从图1所示的光学单元拆下罩的状态的俯视图。图4是将图1所示的可动体、驱动用磁铁及磁性板抽出示出的俯视图。图5是将图2所示的驱动用线圈、驱动用磁铁以及磁性板抽出示出的俯视图。图6是用于说明可动体相对于图1所示的固定体转动时的驱动用线圈和驱动用磁铁的配置关系的俯视图。图7是用于说明图1所示的光学单元的用途的变更例的框图。图8是用于说明图1所示的光学单元的用途的变更例的框图。图9是用于说明图1所示的光学单元的用途的变更例的框图。
具体实施方式
26.以下,参照附图对本发明的实施方式进行说明。
27.(光学单元的整体结构)图1是本发明实施方式的光学单元1的立体图。图2是图1所示的光学单元1的分解立体图。图3是从图1所示的光学单元1取下罩19的状态的俯视图。
28.在以下的说明中,如图1等所示,将相互正交的三个方向分别定义为x方向、y方向和z方向,将x方向设为左右方向,将y方向设为前后方向,将z方向设为上下方向。另外,将左右方向的一侧即图1等的x1方向侧设为“左”侧,将其相反侧即图1等的x2方向侧设为“右”侧,将前后方向的一侧即图1等的y1方向侧设为“前”侧,将其相反侧即图1等的y2方向侧设为“后”侧,将上下方向的一侧即图1等的z1方向侧设为“上”侧,将其相反侧即图1等的z2方向侧设为“下”侧。
29.本实施方式的光学单元1例如是装设于智能手机等便携设备的小型且薄型的单元,具备具有摄影用的透镜及摄像元件的摄像头模块2。光学单元1作为整体形成为厚度薄
的扁平的大致长方体状。光学单元1具备:具有摄像头模块2的可动体3;可转动地保持可动体3的固定体4(参照图1);使可动体3相对于固定体4转动的驱动机构5;以及构成可动体3相对于固定体4的转动支点的球状的两个珠6、7。本实施方式的摄像头模块2是光学模块。
30.摄像头模块2的光轴l与上下方向正交。可动体3能够以与摄像头模块2的光轴l正交的上下方向为转动的轴向而相对于固定体4转动。即,可动体3能够以将上下方向作为轴线方向的轴线l1为转动中心相对于固定体4转动。驱动机构5使可动体3以上下方向为转动的轴向相对于固定体4转动。例如,驱动机构5为了修正摄影时的光学单元1的抖动而使可动体3相对于固定体4转动。或者,驱动机构5例如为了进行全景摄影而使可动体3相对于固定体4转动。本实施方式的上下方向(z方向)成为与摄像头模块2的光轴l正交的第一方向。另外,上下方向成为光学单元1的厚度方向。
31.在本实施方式中,在构成驱动机构5的一部分的后述驱动用线圈23成为非通电状态、可动体3相对于固定体4不转动而可动体3相对于固定体4配置在规定的原点位置(基准位置)时,摄像头模块2的光轴l的方向(光轴方向)与前后方向一致。可动体3例如以原点位置为基准,能够分别向图3的顺时针方向(以下,将该方向设为“顺时针方向”)和图3的逆时针方向(以下,将该方向设为“逆时针方向”)转动10
°
~15
°
左右。
32.可动体3整体形成为上下方向的厚度较薄的扁平的长方体状。可动体3除了摄像头模块2之外,还具备固定摄像头模块2的框架8和固定于框架8的磁性板9。摄像头模块2形成为上下方向的厚度较薄的扁平的长方体状。摄像头模块2的上表面、下表面、后表面以及左右方向的侧面为平面。摄像头模块2的上表面及下表面与上下方向正交。当可动体3配置在原点位置时,摄像头模块2的左右方向的侧面与左右方向正交,摄像头模块2的后表面与前后方向正交。
33.框架8由覆盖摄像头模块2的左右方向的侧面及下表面的第一框架10和覆盖摄像头模块2的上表面的第二框架11构成。第一框架10和第二框架11通过将薄金属板弯曲成规定形状而形成。第一框架10具有:构成第一框架10的左右方向的侧面的两个侧面部10a;以及构成第一框架10的底面的底面部10b。侧面部10a形成为长方形的平板状。在可动体3配置于原点位置时,侧面部10a的厚度方向与左右方向一致。
34.底面部10b形成为长方形的平板状。底面部10b的厚度方向与上下方向一致。在底面部10b的中心部形成有在上下方向上贯通底面部10b的贯穿孔10c。贯穿孔10c形成为圆孔状。在底面部10b的下侧配置有珠6。贯穿孔10c的内径比珠6的外径小。在贯穿孔10c中配置有珠6的上端部。
35.第二框架11具备:形成为长方形的平板状的上表面部11a;以及从上表面部11a向左右方向的外侧突出的两个突出部11b。上表面部11a的厚度方向与上下方向一致。上表面部11a固定于第一框架10的上端。在上表面部11a的中心部形成有在上下方向上贯通上表面部11a的贯穿孔11c。贯穿孔11c形成为圆孔状。在上表面部11a的上侧配置有珠7。贯穿孔11c的内径比珠7的外径小。在贯穿孔11c中配置有珠7的下端部。
36.贯穿孔11c在水平方向上配置在与贯穿孔10c相同的位置,从上下方向观察时,贯穿孔11c与贯穿孔10c重叠。即,珠6和珠7在水平方向上配置在相同位置,从上下方向观察时,珠6和珠7重叠。珠6的中心和珠7的中心配置在轴线l1上。
37.突出部11b形成为突出部11b的前端侧部分朝向下侧折弯成直角的l字状。向下侧
延伸的突出部11b的前端部成为与构成驱动机构5的一部分的后述驱动用磁铁24的定位用凹部24d卡合的卡合部11d。卡合部11d形成为长方形的平板状。在可动体3配置于原点位置时,卡合部11d的厚度方向与左右方向一致。卡合部11d配置在比侧面部10a靠左右方向外侧的位置。
38.磁性板9由具有磁性的磁性材料构成。磁性板9形成为比第一框架10的侧面部10a等厚的长方形平板状。磁性板9固定于侧面部10a的左右方向的外侧面。当可动体3配置在原点位置时,磁性板9的厚度方向与左右方向一致。
39.如上所述,摄像头模块2具备透镜及摄像元件。摄像元件配置在摄像头模块2的后端侧,配置在摄像头模块2的前侧的被摄体被摄像头模块2拍摄。摄像头模块2具备安装有摄像元件的电路基板15。电路基板15构成摄像头模块2的后表面。另外,本实施方式的摄像头模块2具备自动聚焦用的磁驱动机构。
40.柔性印刷基板(fpc)16从构成摄像头模块2的后表面的电路基板15引出。fpc16从左右方向的电路基板15的中心部向后侧引出。另外,fpc16从左右方向上的摄像头模块2的中心部向后侧引出,并且从左右方向上的可动体3的中心部向后侧引出。从电路基板15向后侧引出的fpc16之后向左侧引绕,然后向前侧引绕。fpc16的前端部固定在构成固定体4的后述壳体18上。fpc16弯曲成大致矩形槽形状(大致u形)。
41.固定体4具备:壳体18,其构成固定体4的左右方向的侧面以及下表面;罩19,其构成固定体4的上表面;以及固定板20,其固定于壳体18。壳体18由树脂材料形成。罩19通过将薄金属板弯曲成规定形状而形成。固定板20由薄金属板形成。另外,固定板20形成为大致圆板状。壳体18由构成壳体18的左右方向的侧面的两个侧面部18a和构成壳体18的下表面的底面部18b构成。可动体3在左右方向上配置在两个侧面部18a之间。另外,可动体3配置在底面部18b的上侧。
42.在侧面部18a上形成有沿左右方向贯通的贯穿孔18c。在贯穿孔18c中配置有构成驱动机构5的一部分的后述驱动用线圈23。侧面部18a的以可动体3的转动中心为中心的周向上的贯穿孔18c的两侧部分,成为用于保护驱动用线圈23的保护壁部18d。即,在固定体4上形成有保护壁部18d。
43.另外,在侧面部18a上形成有用于对配置在贯穿孔18c中的驱动用线圈23进行定位的抵接面18e(参照图2)。抵接面18e形成于贯穿孔18c的下侧。在配置于左侧的侧面部18a的前端部形成有朝向左侧突出的fpc固定部18f。fpc16的前端部通过双面胶带等固定于fpc固定部18f。
44.固定板20固定于底面部18b的上表面的中心部。在固定板20的中心形成有配置珠6的下端部的珠配置部20a。珠配置部20a形成为向下侧鼓出的大致半球状,珠配置部20a的上表面形成为朝向下侧凹陷的半球状的凹曲面。珠6配置在珠配置部20a的上侧。
45.罩19固定于壳体18的上端部。可动体3配置在罩19的下侧。在罩19的中心部形成有对珠7施力的弹簧部19a。即,罩19是板簧。弹簧部19a朝向下侧稍微被切出立起。在弹簧部19a的前端部形成有配置珠7的上端部的珠配置部19b。珠配置部19b形成为向上侧鼓出的大致半球状,珠配置部19b的下表面成为朝向上侧凹陷的半球状的凹曲面。珠7配置在珠配置部19b的下侧。
46.弹簧部19a对珠7向下侧施力。珠7通过弹簧部19a的作用力,以规定的接触压力与
珠配置部19b的下表面和第二框架11的贯穿孔11c的上端边缘接触。另外,如上所述,珠6在水平方向上配置在与珠7相同的位置,通过弹簧部19a的作用力,以规定的接触压力与第一框架10的贯穿孔10c的下端边缘以及珠配置部20a的上表面接触。
47.如上所述,可动体3能够以通过珠6、7的中心的轴线l1为转动中心相对于固定体4转动,可动体3相对于固定体4的转动中心由珠6、7、第一框架10的贯穿孔10c、第二框架11的贯穿孔11c、罩19的珠配置部19b和固定板20的珠配置部20a规定。本实施方式的第二框架11成为用于规定可动体3的转动中心的规定部件,在作为规定部件的第二框架11上形成有卡合部11d。
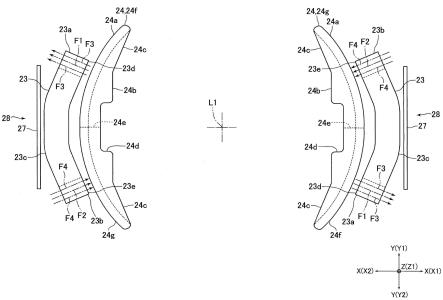
48.(驱动机构的结构)图4是将图1所示的可动体3、驱动用磁铁24及磁性板25抽出示出的俯视图。图5是将图2所示的驱动用线圈23、驱动用磁铁24及磁性板27抽出示出的俯视图。图6是用于说明可动体3相对于图1所示的固定体4转动时的驱动用线圈23和驱动用磁铁24的配置关系的俯视图。在以下的说明中,将以可动体3相对于固定体4的转动中心为中心的径向称为“径向”,将以可动体3相对于固定体4的转动中心为中心的周向(圆周方向)称为“周向”。
49.驱动机构5具有:卷绕成空心状的驱动用线圈23;在径向上与驱动用线圈23相对配置的驱动用磁铁24;以及固定驱动用磁铁24的磁性板25。本实施方式的驱动机构5具备分别配置在可动体3的左右方向的两侧的驱动用线圈23、驱动用磁铁24和磁性板25。即,驱动机构5具备两个驱动用线圈23、两个驱动用磁铁24和两片磁性板25。驱动用线圈23、驱动用磁铁24及磁性板25相对于可动体3相对于固定体4的转动中心以180
°
间距配置。
50.磁性板25通过将由磁性材料构成的金属板弯曲成规定形状而形成。磁性板25由固定于磁性板9的被固定部25a和与被固定部25a的前后方向的两端相连的两个倾斜部25b构成。被固定部25a形成为长方形的平板状。被固定部25a固定于磁性板9的左右方向的外侧面。即,配置于可动体3右侧的磁性板25的被固定部25a固定在配置于框架8右侧的磁性板9的右表面上,配置于可动体3左侧的磁性板25的被固定部25a固定在配置于框架8左侧的磁性板9的左表面上。
51.倾斜部25b形成为长方形的平板状。与被固定部25a的前端相连的倾斜部25b以随着朝向前侧而朝向左右方向的内侧的方式相对于被固定部25a倾斜。与被固定部25a的后端相连的倾斜部25b以随着朝向后侧而朝向左右方向的内侧的方式相对于被固定部25a倾斜。两个倾斜部25b相对于被固定部25a对称地形成。
52.驱动用磁铁24形成为从上下方向观察时的形状为大致月牙状的块状。驱动用磁铁24固定于磁性板25的被固定部25a。即,驱动用磁铁24经由磁性板25固定于可动体3。驱动用磁铁24的上表面及下表面成为与上下方向正交的平面。径向上的驱动用磁铁24的外侧面成为与驱动用线圈23相对的磁铁侧相对面24a。
53.磁铁侧相对面24a形成为凸曲面状。另外,磁铁侧相对面24a形成为在从上下方向观察时以可动体3的转动中心为曲率中心的圆弧状。即,与驱动用线圈23相对的驱动用磁铁24的相对面即磁铁侧相对面24a形成为从上下方向观察时以可动体3的转动中心为曲率中心的圆弧状。从上下方向观察时的磁铁侧相对面24a的中心角例如为90
°
左右。
54.径向上的驱动用磁铁24的内侧面由固定于被固定部25a的平面状的被固定面24b和与被固定面24b的前后方向的两端相连的平面状的倾斜面24c构成。被固定面24b构成径
向上的驱动用磁铁24的内侧面的中心部。被固定面24b固定于被固定部25a的左右方向的外侧面,与被固定部25a的左右方向的外侧面接触。与被固定面24b的前端相连的倾斜面24c以随着朝向前侧而朝向左右方向的内侧的方式相对于被固定面24b倾斜,与被固定面24b的后端相连的倾斜面24c以随着朝向后侧而朝向左右方向的内侧的方式相对于被固定面24b倾斜。
55.与被固定面24b的前端相连的倾斜面24c平行于与被固定部25a的前端相连的倾斜部25b。在该倾斜面24c与该倾斜部25b的外侧面之间形成有微小的间隙。与被固定面24b的后端相连的倾斜面24c平行于与被固定部25a的后端相连的倾斜部25b。在该倾斜面24c与该倾斜部25b的外侧面之间形成有微小的间隙。磁性板25起到驱动用磁铁24的后轭铁的作用。另外,磁性板9起到作为防止摄像头模块2所具有的自动聚焦用的磁驱动机构与驱动机构5的磁干涉的磁屏蔽件的功能。
56.在被固定面24b的中心形成有用于将驱动用磁铁24相对于可动体3定位的定位用凹部24d。即,在驱动用磁铁24上形成有用于相对于可动体3对驱动用磁铁24进行定位的定位用凹部24d,定位用凹部24d形成于驱动用磁铁24的可动体3侧的面的中心。定位用凹部24d从被固定面24b向左右方向的外侧凹陷。定位用凹部24d形成为遍及被固定面24b的上下方向的整个区域的方槽状。
57.摄像头模块2的光轴方向上的定位用凹部24d的宽度比摄像头模块2的光轴方向上的第二框架11的卡合部11d的宽度稍宽。卡合部11d与定位用凹部24d卡合。在本实施方式中,通过卡合部11d与定位用凹部24d卡合,驱动用磁铁24相对于可动体3被定位。具体而言,通过卡合部11d与定位用凹部24d卡合,在摄像头模块2的光轴方向上,驱动用磁铁24相对于可动体3被定位。在可动体3配置于原点位置时,两个驱动用磁铁24左右对称地配置。
58.驱动用线圈23是通过将导线卷绕成空心状而形成的空心线圈。驱动用线圈23由与上下方向平行的一对(两个)有效边部23a、23b、连接一对有效边部23a、23b的上端彼此的连接边部23c、以及连接一对有效边部23a、23b的下端彼此的连接边部23c构成。有效边部23a、23b是有助于驱动机构5的驱动力的部分。驱动用线圈23沿着从上下方向观察时的形状呈圆弧状的磁铁侧相对面24a弯曲。具体而言,驱动用线圈23沿着磁铁侧相对面24a在两处弯折。另外,驱动用线圈23被弯曲成大致v形状。
59.一对有效边部23a、23b以在周向上隔开间隔的状态配置。有效边部23a构成周向上的驱动用线圈23的一端部,有效边部23b构成周向上的驱动用线圈23的另一端部。在本实施方式中,有效边部23a构成驱动用线圈23的顺时针方向的端部,有效边部23b构成逆时针方向的端部。本实施方式的有效边部23a是第一有效边部,有效边部23b是第二有效边部。
60.驱动用线圈23在径向上配置在驱动用磁铁24的外侧。另外,驱动用线圈23在左右方向上配置在驱动用磁铁24的外侧。驱动用线圈23配置在壳体18的贯穿孔18c中,两个驱动用线圈23左右对称地配置。配置在下侧的连接边部23c的左右方向的内侧面与壳体18的抵接面18e抵接,通过抵接面18e将驱动用线圈23在水平方向上定位。
61.如上所述,周向上的贯穿孔18c的两侧部分成为保护壁部18d,在周向上,在驱动用线圈23的两侧配置有保护壁部18d。保护壁部18d在径向上配置在驱动用线圈23的内侧。即,保护壁部18d在径向上配置在比驱动用线圈23更靠驱动用磁铁24侧的位置。
62.从上下方向观察时,周向上的驱动用线圈23的中心部成为与前后方向平行的直线
状。驱动用线圈23安装在柔性印刷基板(fpc)26上。具体而言,周向上的驱动用线圈23的中心部的左右方向的外侧面安装于fpc26。另外,两个驱动用线圈23安装在共用的fpc26上。fpc26固定于壳体18的左右方向的外侧面及下表面。即,驱动用线圈23通过fpc26固定在固定体4上。当向驱动用线圈23提供电流时,可动体3以轴线l1为转动中心相对于固定体4转动。
63.径向上的有效边部23a的内侧面成为与驱动用磁铁24的磁铁侧相对面24a相对的有效边部侧相对面23d。径向上的有效边部23b的内侧面成为与磁铁侧相对面24a相对的有效边部侧相对面23e。在从上下方向观察时,有效边部侧相对面23d、23e与径向大致正交。即,在从上下方向观察时,与磁铁侧相对面24a相对的有效边部23a、23b的相对面即有效边部侧相对面23d、23e与以可动体3的转动中心为中心的径向大致正交。另外,有效边部侧相对面23d、23e与磁铁侧相对面24a的切线方向平行。本实施方式的有效边部侧相对面23d是第一有效边部侧相对面,有效边部侧相对面23e是第二有效边部侧相对面。
64.磁铁侧相对面24a在周向上被磁化为两极。即,磁铁侧相对面24a被磁化成周向上的磁铁侧相对面24a的一侧部分的磁极与周向上的磁铁侧相对面24a的另一侧部分的磁极成为不同的磁极,在周向上极化成两极。具体而言,周向上的驱动用磁铁24的中心成为极化位置(磁化分极线)24e,磁铁侧相对面24a以极化位置24e为界极化为两极。
65.若将驱动用磁铁24的配置在比极化位置24e靠顺时针方向侧的位置的部分设为第一磁铁部24f,将驱动用磁铁24的配置在比极化位置24e靠逆时针方向侧的位置的部分设为第二磁铁部24g,则驱动用磁铁24由第一磁铁部24f和第二磁铁部24g构成。即,驱动用磁铁24由在周向上配置于有效边部23a侧的第一磁铁部24f和在周向上配置于有效边部23b侧的第二磁铁部24g构成,第一磁铁部24f的磁铁侧相对面24a的磁极与第二磁铁部24g的磁铁侧相对面24a的磁极成为不同的磁极。在本实施方式中,第一磁铁部24f的磁铁侧相对面24a的磁极为n极,第二磁铁部24g的磁铁侧相对面24a的磁极为s极。
66.驱动用磁铁24被磁化成,在可动体3相对于固定体4配置于原点位置的状态下从上下方向观察时,通过有效边部侧相对面23d、23e的中心的磁力线f1、f2(参照图5)与有效边部侧相对面23d、23e大致正交。即,第一磁铁部24f被磁化成,在可动体3配置于原点位置的状态下从上下方向观察时,通过有效边部侧相对面23d的中心的磁力线f1与有效边部侧相对面23d大致正交,第二磁铁部24g被磁化成,在可动体3配置于原点位置的状态下从上下方向观察时,通过有效边部侧相对面23e的磁力线f2与有效边部侧相对面23e大致正交。磁力线f1、f2的朝向与径向一致。
67.在本实施方式中,第一磁铁部24f被磁化成,在可动体3配置于原点位置的状态下从上下方向观察时,通过有效边部侧相对面23d的中心的磁力线f1与通过有效边部侧相对面23d的偏离中心的部位的磁力线f3(参照图5)平行。即,第一磁铁部24f被磁化成,在可动体3配置于原点位置的状态下,通过有效边部侧相对面23d的磁力线f1、f3与有效边部侧相对面23d大致正交。另外,在本实施方式中,第一磁铁部24f被磁化成第一磁铁部24f的、在可动体3的转动范围内与有效边部侧相对面23d相对的部分所产生的磁力线与磁力线f1平行。
68.同样,第二磁铁部24g被磁化成,在可动体3配置于原点位置的状态下从上下方向观察时,通过有效边部侧相对面23e的中心的磁力线f2与通过有效边部侧相对面23e的偏离中心的部位的磁力线f4(参照图5)平行。即,第二磁铁部24g被磁化成,在可动体3配置于原
点位置的状态下,通过有效边部侧相对面23e的磁力线f2、f4与有效边部侧相对面23e大致正交。另外,在本实施方式中,第二磁铁部24g被磁化成第二磁铁部24g的、在可动体3的转动范围内与有效边部侧相对面23e相对的部分所产生的磁力线与磁力线f2平行。
69.另外,第一磁铁部24f的倾斜面24c成为与通过有效边部侧相对面23d时的磁力线f1的方向大致正交的平面。即,可动体3配置于原点位置时的第一磁铁部24f的倾斜面24c与有效边部侧相对面23d大致平行。另外,第二磁铁部24g的倾斜面24c成为与通过有效边部侧相对面23e时的磁力线f2的方向大致正交的平面。即,可动体3配置于原点位置时的第二磁铁部24g的倾斜面24c与有效边部侧相对面23e大致平行。
70.在本实施方式中,即使可动体3相对于固定体4转动到顺时针方向上的转动端,驱动用磁铁24的极化位置24e在周向上也不会到达有效边部23a(参照图6的(a))。另外,即使可动体3相对于固定体4转动到逆时针方向上的转动端,极化位置24e在周向上也不会到达有效边部23b(参照图6的(b))。即,周向上的一对有效边部23a、23b的间隔被设定为,在可动体3的转动范围的整个区域内,极化位置24e不到达有效边部23a、23b。
71.在fpc26的安装有驱动用线圈23的面上,安装有用于检测可动体3相对于固定体4的转动角度的霍尔元件(省略图示)。霍尔元件配置在卷绕成空心状的驱动用线圈23的内周侧。在fpc26的安装有驱动用线圈23的面的相反侧的面(具体而言,左右方向上的fpc26的外侧面)上固定有由磁性材料构成的平板状的磁性板27。磁性板27形成为长方形状。磁性板27的厚度方向与左右方向一致。在可动体3配置于原点位置的状态下从上下方向观察时,磁性板27的前后方向的中心与驱动用磁铁24的极化位置24e在周向上配置于相同位置。
72.通过在驱动用磁铁24与磁性板27之间产生的磁吸引力,配置于原点位置的可动体3的位置得以保持。即,驱动用磁铁24及磁性板27起到在未向驱动用线圈23提供电流时维持可动体3配置于原点位置的状态的功能。在本实施方式中,由驱动用磁铁24和磁性板27构成用于维持可动体3配置在原点位置的状态的位置保持机构28。
73.(本实施方式的主要效果)如上所述,在本实施方式中,驱动用磁铁24的磁铁侧相对面24a形成为从上下方向观察时以可动体3的转动中心为曲率中心的圆弧状,驱动用线圈23沿着从上下方向观察时的形状呈圆弧状的磁铁侧相对面24a弯折。另外,在本实施方式中,从上下方向观察时,驱动用线圈23的有效边部23a、23b的有效边部侧相对面23d、23e与径向大致正交。因此,在本实施方式中,即使可动体3相对于固定体4的转动角度变大,也能够将磁铁侧相对面24a与有效边部侧相对面23d、23e之间的距离保持为一定。因此,在本实施方式中,即使可动体3相对于固定体4的转动角度变大,也能够抑制驱动机构5的驱动力的降低。
74.在本实施方式中,驱动用磁铁24被磁化成,在可动体3相对于固定体4配置于原点位置的状态下从上下方向观察时,通过与径向大致正交的有效边部侧相对面23d、23e的中心的磁力线f1、f2与有效边部侧相对面23d、23e大致正交。因此,在本实施方式中,在可动体3配置于原点位置的状态下向驱动用线圈23提供电流时,能够提高驱动机构5的作用于磁铁侧相对面24a的切线方向的驱动力。因此,在本实施方式中,能够使配置于原点位置的可动体3相对于固定体4更容易移动。
75.在本实施方式中,第一磁铁部24f被磁化成第一磁铁部24f的、在可动体3的转动范围内与有效边部侧相对面23d相对的部分所产生的磁力线与磁力线f1平行。另外,在本实施
方式中,第二磁铁部24g被磁化成第二磁铁部24g的、在可动体3的转动范围内与有效边部侧相对面23e相对的部分所产生的磁力线与磁力线f2平行。因此,在本实施方式中,与以磁力线形成以可动体3的转动中心为中心的放射状的方式对第一磁铁部24f和第二磁铁部24g进行磁化的情况相比,即使驱动用磁铁24的形状为复杂的形状,也能够比较容易地对驱动用磁铁24进行磁化。
76.在本实施方式中,在用于规定可动体3的转动中心的第二框架11上形成有卡合部11d,该卡合部11d与驱动用磁铁24的定位用凹部24d卡合而将驱动用磁铁24相对于可动体3定位。即,在本实施方式中,用于规定可动体3的转动中心的第二框架11的一部分直接与驱动用磁铁24卡合,由此驱动用磁铁24相对于可动体3被定位。因此,在本实施方式中,能够抑制驱动用磁铁24相对于可动体3的转动中心的位置偏移。因此,在本实施方式中,即使驱动用磁铁24的磁铁侧相对面24a与驱动用线圈23的有效边部侧相对面23d、23e之间的距离变短,也能够防止可动体3相对于固定体4转动时的磁铁侧相对面24a与有效边部侧相对面23d、23e之间的干涉。
77.在本实施方式中,定位用凹部24d形成于驱动用磁铁24的可动体3侧的面的中心。因此,在本实施方式中,能够减弱驱动用磁铁24的可动体3侧的面的中心部分的磁通。因此,在本实施方式中,即使摄像头模块2具备自动聚焦用的磁驱动机构,也能够抑制该磁驱动机构与驱动机构5的磁干涉。另外,在本实施方式中,由于在第一框架10的左右方向的外侧面固定有发挥作为磁屏蔽件的功能的磁性板9,因此能够有效地抑制摄像头模块2的自动对焦用的磁驱动机构与驱动机构5的磁干涉。
78.在本实施方式中,在周向上配置在驱动用线圈23的两侧的保护壁部18d在径向上配置在驱动用线圈23的内侧。因此,在本实施方式中,例如即使对光学单元1施加冲击,对可动体3作用过剩的力,可动体3相对于固定体4移动,也能够防止驱动用线圈23与驱动用磁铁24的接触。因此,在本实施方式中,即使过剩的力作用于可动体3而使可动体3相对于固定体4移动,也能够防止驱动用线圈23及驱动用磁铁24的损伤。
79.(光学单元的用途的变更例1)图7、图8是用于说明图1所示的光学单元1的用途的变更例的框图。
80.在上述实施方式中,光学单元1装设于智能手机等便携设备来使用,但如图7、图8所示,光学单元1也可以装设于作为车载用的摄影装置的驾驶记录仪35来使用。在该变形例中,驾驶记录仪35具备惯性传感器36。惯性传感器36例如是陀螺传感器(陀螺仪)或加速度传感器。另外,惯性传感器36也可以是将陀螺传感器和加速度传感器一体化的传感器。
81.在图7所示的变形例中,光学单元1具备惯性传感器36。惯性传感器36安装在固定体4上。例如,惯性传感器36安装在fpc26上,经由fpc26固定在固定体4上。在图8所示的变形例中,惯性传感器36配置在光学单元1的外部。例如,驾驶记录仪35具备固定有固定体4的固定部件,惯性传感器36安装于该固定部件。惯性传感器36起到检测装设有驾驶记录仪35的车辆的行进方向的功能。
82.驾驶记录仪35具备与惯性传感器36电连接的控制部37。惯性传感器36的输出信号被输入到控制部37。在控制部37上还电连接有驱动用线圈23。具体而言,与fpc26电连接,配置在驱动用线圈23的内周侧的霍尔元件也与控制部37电连接。控制部37对驱动机构5进行控制。
83.在驾驶记录仪35中,控制部37基于惯性传感器36的检测结果,控制向驱动用线圈23提供的电流,使可动体3转动。即,驱动机构5基于惯性传感器36的检测结果使可动体3转动。具体而言,控制部37基于惯性传感器36的检测结果,以追随车辆的方向盘的动作的方式使可动体3转动。更具体而言,控制部37基于惯性传感器36的检测结果使可动体3转动,以使摄像头模块2的光轴方向始终朝向车辆的行进方向。即,在该变更例中,驱动机构5使可动体3相对于固定体4转动,以使摄像头模块2的光轴方向始终朝向车辆的行进方向。另外,控制部37基于霍尔元件的检测结果控制向驱动用线圈23提供的电流,使可动体3转动。
84.在该变更例中,基于惯性传感器36的检测结果,使可动体3转动,以使摄像头模块2的光轴方向始终朝向车辆的行进方向,因此,例如能够取得车辆在交叉路口转弯过程中的车辆的行进方向的图像。因此,例如即使在车辆在交叉路口转弯后发生了碰撞事故,也能够基于由驾驶记录仪35取得的图像,掌握从事故发生的稍前到事故发生为止的状况。
85.另外,图7所示的光学单元1(即,具备惯性传感器36的光学单元1)也可以装设在驾驶记录仪35以外的装置上使用。即使在这种情况下,也能够基于惯性传感器36的检测结果使可动体3转动,以使摄像头模块2的光轴方向朝向固定体4倾斜的方向。
86.(光学单元的用途的变更例2)图9是用于说明图1所示的光学单元1的用途的变更例的框图。
87.在光学单元1装设于驾驶记录仪35而使用的情况下,驾驶记录仪35也可以不具备惯性传感器36。在这种情况下,如图9所示,安装有驾驶记录仪35的车辆具备检测车辆的转向角度的转向角度检测器38。驾驶记录仪35的控制部37与转向角度检测器38及驱动用线圈23电连接。在图9所示的例子中,由驾驶记录仪35和转向角度检测器38构成作为摄影系统的驾驶记录仪系统39。
88.在该变更例中,控制部37根据转向角度检测器38的检测结果控制向驱动用线圈23提供的电流,使可动体3转动。具体而言,控制部37根据转向角度检测器38的检测结果使可动体3转动,以使摄像头模块2的光轴方向始终朝向车辆的行进方向。在该变更例中,例如也能够取得车辆在交叉路口转弯过程中的车辆的行进方向的图像,因此,例如即使车辆在交叉路口转弯后发生碰撞事故,也能够基于由驾驶记录仪35取得的图像,掌握从事故发生的稍前到事故发生为止的状况。
89.(其他实施方式)上述实施方式是本发明的优选实施方式的一例,但并不限定于此,在不改变本发明的主旨的范围内能够进行各种变形实施。
90.在上述实施方式中,用于维持可动体3配置在原点位置的状态的位置保持机构也可以是板簧等弹簧部件。在位置保持机构是板簧的情况下,该板簧例如具备固定在可动体3上的被固定部、固定在固定体4上的被固定部以及连接被固定部彼此的多个弹簧部。另外,在上述实施方式中,驱动用线圈23可以沿着磁铁侧相对面24a在一个部位弯折,也可以在三个以上部位弯折。另外,驱动用线圈23也可以沿着磁铁侧相对面24a弯曲成圆弧状。
91.在上述实施方式中,驱动机构5可以仅具备一个驱动用线圈23及驱动用磁铁24,也可以具备三个以上的驱动用线圈23及驱动用磁铁24。另外,在上述实施方式中,也可以将驱动用线圈23固定在可动体3上,将驱动用磁铁24固定在固定体4上。在该情况下,驱动用磁铁24在径向上配置在驱动用线圈23的外侧。另外,在该情况下,径向上的驱动用磁铁24的内侧
面成为与驱动用线圈23相对的磁铁侧相对面,径向上的有效边部23a、23b的外侧面成为与驱动用磁铁24的磁铁侧相对面相对的有效边部侧相对面。
92.在上述实施方式中,也可以以磁力线形成以可动体3的转动中心为中心的放射状的方式对第一磁铁部24f和第二磁铁部24g进行磁化。另外,在上述实施方式中,光学单元1也可以具备摄像头模块2以外的光学模块。例如,光学单元1也可以具备射出激光的激光模块作为光学模块。另外,光学单元1也可以具备具有透镜或棱镜等光学部件的光学模块。符号说明
93.1光学单元2摄像头模块(光学模块)3可动体4固定体5驱动机构11第二框架(限定部件)11d卡合部18d保护壁部23驱动用线圈23a有效边部(第一有效边部)23b有效边部(第二有效边部)23d有效边部侧相对面(第一有效边部侧相对面)23e有效边部侧相对面(第二有效边部侧相对面)24驱动用磁铁24a磁铁侧相对面24d定位用凹部24f第一磁铁部24g第二磁铁部28位置保持机构35驾驶记录仪(摄影装置)36惯性传感器37控制部38转向角检测器39摄影系统f1、f2磁力线(通过有效边部侧相对面的中心的磁力线)f3磁力线(通过第一有效边部侧相对面的磁力线)f4磁力线(通过第二有效边部侧相对面的磁力线)l摄像头模块的光轴(光学模块的光轴)z第一方向。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1