液体变焦系统初始结构的确定方法和计算机可读存储介质
本发明涉及光学变焦,具体而言,涉及一种液体变焦系统初始结构的确定方法和非临时性计算机可读存储介质。
背景技术:
1、变焦光学成像系统的焦距可调,其在机器视觉、军事侦察等领域中存在广泛的应用。现有变焦光学系统主要分为机械位移式变焦系统和非位移式变焦系统。机械位移式变焦系统具有较大的变倍比和相对更好的成像质量,但是结构较为复杂,体积难以控制,在一定程度上限制了其在小型无人领域的应用。液体透镜是一类柔性可调焦器件,应用于光学系统设计可实现无位移组件条件下系统连续变焦功能,具有无磨损、体积小、重量轻等优点。正因为液体变焦系统所具有的这些优点,使其日益成长为变焦系统设计领域的研究热点。
2、相关技术中液体变焦系统的研究往往局限于仅包含两个液体透镜的变焦系统,对于包含三个及以上液体透镜的变焦系统的研究相对较少,尤其是缺乏确定该类变焦系统初始结构参数的方法研究,而初始结构参数的确定影响着变焦系统设计的合理性。
技术实现思路
1、本发明旨在至少解决现有技术中存在的技术问题之一。为此,本发明提出一种液体变焦系统初始结构的确定方法,所述液体变焦系统初始结构的确定方法利于提高包含三个及以上液体透镜变焦系统设计的合理性。
2、本发明还提出一种实现所述液体变焦系统初始结构的确定方法的非临时性计算机可读存储介质。
3、根据本发明第一方面实施例的液体变焦系统初始结构的确定方法,所述液体变焦系统包括第一固体透镜、第二固体透镜以及顺次位于所述第一固体透镜和所述第二固体透镜之间的第一液体透镜、第二液体透镜和第三液体透镜,所述第一固体透镜邻近物面且所述第二固体透镜邻近像面,所述方法包括:
4、利用高斯括号法对所述液体变焦系统展开近轴特性分析,得到变焦方程;
5、根据所述变焦方程构造限制条件,遍历结构参数并根据所述限制条件得到结构参数解空间;
6、根据设计要求构造评价函数并根据所述评价函数在所述解空间中搜索最优初始结构参数;
7、根据所述最优初始结构参数查找真实镜头数据,得到所述液体变焦系统的初始结构。
8、根据本发明实施例的液体变焦系统初始结构的确定方法,利于提高包含三个及以上液体透镜变焦系统设计的合理性,适用于不同类型的非位移式变焦系统,具有较强的适应性。
9、另外,根据本发明实施例的液体变焦系统初始结构的确定方法还具有如下附加的技术特征:
10、根据本发明的一些实施例,所述高斯括号法包括:
11、根据下式表示高斯参数α、β、γ、δ:
12、
13、其中为所述第一固体透镜的光焦度,为所述第一液体透镜的光焦度,为所述第二液体透镜的光焦度,为所述第三液体透镜的光焦度,为所述第二固体透镜的光焦度,e1为所述第一固体透镜与所述第一液体透镜之间的距离,e2为所述第一液体透镜与所述第二液体透镜之间的距离,e3为所述第二液体透镜与所述第三液体透镜之间的距离,e4为所述第三液体透镜与所述第二固体透镜之间的距离;
14、根据式(1)得出所述液体变焦系统的近轴特性参数e0、e5:
15、
16、其中为所述液体变焦系统的光焦度,f′是所述液体变焦系统的焦距,n′是像方空间的折射率,e0表示所述物面与所述第一固体透镜之间的物距,e5表示所述像面与所述第二固体透镜之间的像距;
17、物距为无穷远时根据式(2)得到如下光焦度方程和像面偏移方程:
18、
19、其中const表示常数;
20、根据高斯括号的运算法则对式(1)进行去括号:
21、
22、其中系数根据下式计算:
23、
24、根据本发明的一些实施例,所述限制条件包括:
25、条件1,所述液体变焦系统的光焦度随着所述第一液体透镜的光焦度的变化而单调变化;
26、条件2,所述液体变焦系统的像距在所述条件1的变焦过程中不变。
27、在本发明的一些实施例中,所述液体变焦系统的像距为与所述第一液体透镜的光焦度的最小值相对应的像距。
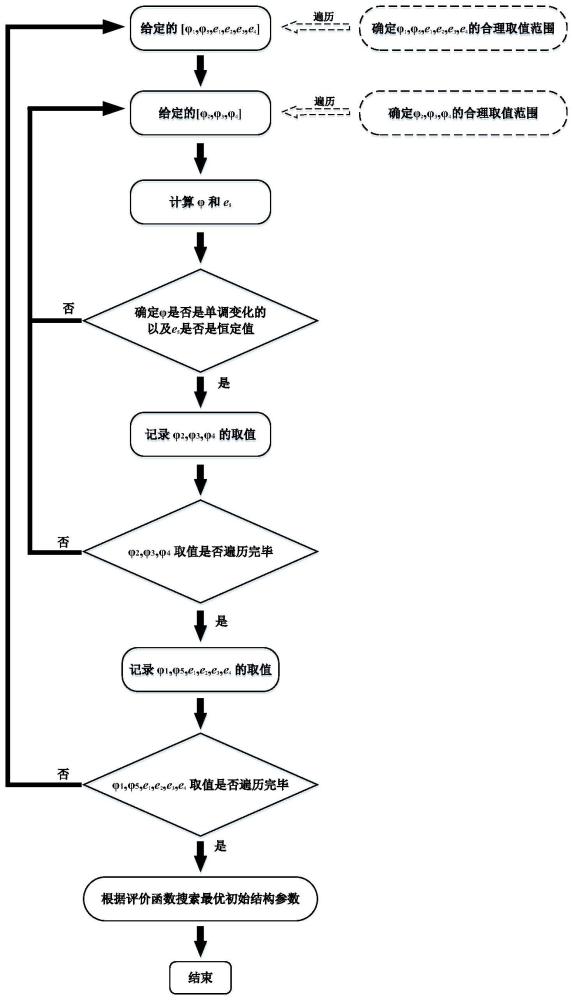
28、根据本发明的一些实施例,所述遍历结构参数并根据所述限制条件得到结构参数解空间包括:
29、分别确定e1、e2、e3、e4、和的取值范围,中各参数为各自取值范围中的任一值;
30、分别确定和的取值范围,中各参数为各自取值范围中的任一值;
31、对每组遍历所有在确定的下对每一组根据公式(3)计算和e5;
32、判断和e5是否满足所述限制条件,若是则记录
33、记录满足所述限制条件的
34、在本发明的一些实施例中,将各组按照单调变化的顺序进行遍历。
35、在本发明的一些具体实施例中,e1、e2、e3、e4的取值范围均为0mm~30mm,的取值范围均为-100m-1~100m-1。
36、根据本发明的一些实施例,所述评价函数包括粗评价函数mfc和精细评价函数mff,根据下式计算:
37、
38、其中ω1~ω7分别是权重系数,n由液体透镜的光焦度变化范围以及遍历光焦度时的步长决定。
39、根据本发明第二方面实施例的非临时性计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现如第一方面实施例所述的液体变焦系统初始结构的确定方法。
40、根据本发明实施例的非临时性计算机可读存储介质,利于提高包含三个及以上液体透镜变焦系统设计的合理性,适用于不同类型的非位移式变焦系统,具有较强的适应性。
41、本发明的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
技术特征:
1.一种液体变焦系统初始结构的确定方法,其特征在于,所述液体变焦系统包括第一固体透镜、第二固体透镜以及顺次位于所述第一固体透镜和所述第二固体透镜之间的第一液体透镜、第二液体透镜和第三液体透镜,所述第一固体透镜邻近物面且所述第二固体透镜邻近像面,所述方法包括:
2.根据权利要求1所述的液体变焦系统初始结构的确定方法,其特征在于,所述高斯括号法包括:
3.根据权利要求1所述的液体变焦系统初始结构的确定方法,其特征在于,所述限制条件包括:
4.根据权利要求3所述的液体变焦系统初始结构的确定方法,其特征在于,所述液体变焦系统的像距为与所述第一液体透镜的光焦度的最小值相对应的像距。
5.根据权利要求1所述的液体变焦系统初始结构的确定方法,其特征在于,所述遍历结构参数并根据所述限制条件得到结构参数解空间包括:
6.根据权利要求5所述的液体变焦系统初始结构的确定方法,其特征在于,将各组按照单调变化的顺序进行遍历。
7.根据权利要求5所述的液体变焦系统初始结构的确定方法,其特征在于,e1、e2、e3、e4的取值范围均为0mm~30mm,的取值范围均为-100m-1~100m-1。
8.根据权利要求1所述的液体变焦系统初始结构的确定方法,其特征在于,所述评价函数包括粗评价函数mfc和精细评价函数mff,根据下式计算:
9.一种非临时性计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求中1-8中任一项所述的液体变焦系统初始结构的确定方法。
技术总结
本发明公开了一种液体变焦系统初始结构的确定方法和计算机可读存储介质,液体变焦系统包括第一固体透镜、第二固体透镜以及顺次位于第一固体透镜和第二固体透镜之间的第一液体透镜、第二液体透镜和第三液体透镜,第一固体透镜邻近物面且第二固体透镜邻近像面,所述方法包括:利用高斯括号法对液体变焦系统展开近轴特性分析,得到变焦方程;根据变焦方程构造限制条件,遍历结构参数并根据限制条件得到结构参数解空间;根据设计要求构造评价函数并根据评价函数在解空间中搜索最优初始结构参数;根据最优初始结构参数查找真实镜头数据,得到液体变焦系统的初始结构。根据本发明的液体变焦系统初始结构的确定方法,利于提高设计合理性,适用性强。
技术研发人员:洪华杰,刘召阳,甘子豪,吕建明,邢堃盛
受保护的技术使用者:中国人民解放军国防科技大学
技术研发日:
技术公布日:2024/3/4
- 还没有人留言评论。精彩留言会获得点赞!