自适应辨识系统、自适应辨识装置及自适应辨识方法与流程
[0001]
本发明涉及自适应辨识系统、自适应辨识装置及自适应辨识方法。
背景技术:
[0002]
例如,当以原音再现、立体音响、噪声降低等为目的而对音频信号进行信号处理时,使用从扬声器到设置在控制点处的麦克风(理想的是受听者的耳朵)的、声音的传递系统的特性。
[0003]
此外,作为用来得到声音的传递系统的特性的代表性的方法之一,有被称作自适应辨识的技术。该自适应辨识是通过自适应滤波器将声音的传递系统模型化的技术,作为自适应算法,广泛地使用lms(least mean square,最小均方)算法(例如,参照专利文献1)。
[0004]
专利文献1:日本特开2007-281860号公报
[0005]
当在实际的环境下进行自适应辨识时,例如有受到噪声等的干扰的影响而辨识精度下降的情况。在lms算法的情况下,通过将步长(step size)设定得小,能够避免辨识精度的下降,但如果使步长变小,则自适应速度下降,所以有到得到最终的辨识结果为止需要时间的问题。
[0006]
为了解决这样的问题,例如可以考虑使用将最速下降算法中的期待值的运算以有限次的时间平均进行了近似的自适应算法(以下,称作近似最速下降算法),来缩短到得到最终的辨识结果为止的时间。但是,在该方法中,与lms算法相比,有自适应辨识系统的运算量大幅增加的问题。
技术实现要素:
[0007]
本发明的一实施方式是鉴于上述的问题而做出的,在自适应辨识系统中,能够以比近似最速下降算法少的运算量得到与近似最速下降算法同等的辨识精度。
[0008]
为了解决上述问题,有关本发明的一实施方式的自适应辨识系统是使用自适应滤波器辨识传递系统的特性的自适应辨识系统,具有:信号生成部,生成包含基本频率的整数倍的频率成分、且满足持续激励性条件的周期性的辨识用输入信号;设定部,将移动平均时间设定为上述辨识用输入信号的基本周期;以及自适应算法执行部,使用移动平均值和对角化矩阵来更新上述自适应滤波器的系数,上述移动平均值是将观测信号(包含干扰的被叠加了上述传递系统的辨识用输入信号)和上述鉴别用输入信号向量的互相关向量用上述移动平均时间进行移动平均后的值,上述对角化矩阵是对将上述辨识用输入信号向量的自相关矩阵用上述移动平均时间进行移动平均后的矩阵进行对角化后的矩阵。
[0009]
发明效果
[0010]
根据本发明的一实施方式,在自适应辨识系统中,能够以比近似最速下降算法少的运算量得到与近似最速下降算法同等的辨识精度。
附图说明
[0011]
图1a及图1b是表示有关一实施方式的自适应辨识系统的系统结构的例子的图。
[0012]
图2是表示有关一实施方式的控制部的功能结构的例子的图。
[0013]
图3是表示有关一实施方式的辨识用输入信号的信号波形的图像的图。
[0014]
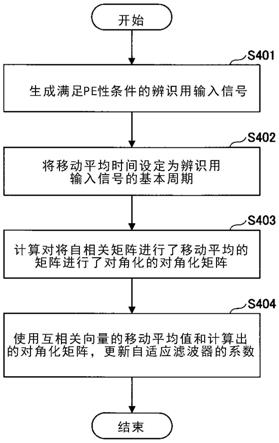
图4是表示有关一实施方式的自适应辨识系统的处理的例子的流程图。
[0015]
图5是表示有关一实施方式的自适应辨识系统的计算量的例子的图。
[0016]
图6是用来对以往的自适应辨识系统进行说明的图。
[0017]
图7是用来对以往的自适应算法的例子进行说明的图。
[0018]
图8a及图8b是表示以往的自适应辨识系统的系统结构的例子的图。
[0019]
图9是表示以往的自适应辨识系统的计算量的例子的图。
[0020]
标号说明
[0021]
100
ꢀꢀꢀ
自适应辨识系统
[0022]
110
ꢀꢀꢀ
自适应辨识装置
[0023]
111
ꢀꢀꢀ
自适应滤波器
[0024]
112
ꢀꢀꢀ
自适应算法执行部
[0025]
115
ꢀꢀꢀ
存储部
[0026]
201
ꢀꢀꢀ
信号生成部
[0027]
202
ꢀꢀꢀ
设定部
[0028]
203
ꢀꢀꢀ
计算部
具体实施方式
[0029]
以下,参照附图对本发明的实施方式进行说明。
[0030]
<关于自适应辨识系统>
[0031]
在对有关本实施方式的自适应辨识系统进行说明之前,对以往的自适应辨识系统简单地进行说明。
[0032]
图6是用来对以往的自适应辨识系统进行说明的图。自适应辨识系统1例如是使用自适应辨识装置10辨识声音等的传递系统11的特性的系统。例如,自适应辨识装置10基于辨识用输入信号x(n)和从传递系统11输出的输出信号d(n),通过规定的自适应算法自适应地辨识传递系统11的特性。
[0033]
但是,在实际的环境下进行自适应辨识的情况下,由于噪声v(n)等的干扰混入到被输入到自适应辨识装置10中的观测信号y(n)中,有系统的辨识精度下降的问题。
[0034]
图7是用来对以往的自适应算法的例子进行说明的图。在以往的自适应辨识系统1中,作为自适应算法而广泛使用lms(least mean square)算法。
[0035]
lms算法是基于最速下降法的自适应算法,最速下降法是用来求出向量w的函数f(w)的极小值的古典的数值解析法。在图7中表示基于最速下降法的自适应算法(最速下降算法)的式子。
[0036]
在该最速下降算法的式子中,运算e[]表示求出无限次试行的平均值的期待值运算。因而,难以将该最速下降算法的式子作为自适应算法安装到自适应辨识装置10。
[0037]
所以,作为能够安装到自适应辨识装置10的算法,广泛地使用将最速下降算法的
期待值运算20、21替换为瞬时值22、23的lms算法的式子。
[0038]
此外,作为能够安装到自适应辨识装置10的其他算法,已知有将最速下降算法的期待值运算20、21用有限次的时间平均24、25近似的自适应算法(以下,称作近似最速下降算法)。
[0039]
(使用lms的自适应辨识系统)
[0040]
图8a表示使用lms算法的自适应辨识系统1的系统结构的例子。在图8a的例子中,自适应辨识装置10包括自适应滤波器31和自适应算法执行部32,自适应算法执行部32将在图7中说明的lms算法的式子作为自适应更新式,更新自适应滤波器31的传递函数w(n)。
[0041]
在这样的使用lms算法的自适应辨识系统1中,在不存在作为干扰的噪声v(n)、并且能够用自适应滤波器31的传递函数w(n)完全模拟传递系统11的情况下,自适应滤波器31收敛于传递系统11的特性。即,w(∞)=h。
[0042]
但是,在存在作为干扰的噪声v(n)的情况下,自适应滤波器31受到其影响,不收敛于最优解而在最优解的附近振动。并且,作为干扰的噪声v(n)越大,其振动越大。
[0043]
在这样的情况下,在使用lms算法的自适应辨识系统1中,通过将步长μ设定得较小,能够将该振动抑制得较小。另一方面,如果将步长μ设定的较小,则自适应速度下降,所以有到得到最终的结果为止需要更多的时间的问题。
[0044]
(使用近似最速下降算法的自适应辨识系统)
[0045]
图8b表示使用近似最速下降算法的自适应辨识系统1的系统结构的例子。在图8b的例子中,自适应辨识装置10包括自适应滤波器33和自适应算法执行部34,自适应算法执行部34将在图7中说明的近似最速下降算法作为自适应更新式,更新自适应滤波器31的传递函数w(n)。
[0046]
在这样的使用近似最速下降算法的自适应辨识系统1中,即使不将步长μ设定得较小,也能够通过时间平均来抑制作为干扰的噪声v(n)的影响,所以能够使到得到最终的结果为止的时间变得更短。但是,在使用近似最速下降算法的自适应辨识系统1中,与使用lms算法的自适应辨识系统1相比,有需要更多的运算的问题。
[0047]
图9是表示自适应辨识系统的计算量的例子的图。这里,为了使说明变得容易,表示了自适应滤波器的抽头数为2抽头的情况下的lms算法的计算数和近似最速下降算法的计算数。
[0048]
如图9所示,在使用lms算法的自适应辨识系统1中,1次的自适应所需要的计算数为,用于梯度估计的乘法需要2次,用于步长调整的乘法需要2次,用于自适应更新的加法需要2次。
[0049]
另一方面,在使用近似最速下降算法的自适应辨识系统1中,1次的自适应所需要的计算数为,用于梯度估计的乘法需要9次、加法需要19次,用于步长调整的乘法需要2次,用于自适应更新的加法需要2次。另外,这里作为一例,表示了移动平均的加法处理是环形缓冲方式、进行3次加法处理(数据值加法、减法、指针增加)的情况下的计算量。
[0050]
此外,实际被使用的自适应滤波器例如为128抽头以上的抽头数的情况较多,在这样的情况下,使用近似最速下降算法的自适应辨识系统1的运算量变得更多。
[0051]
所以,在本实施方式中,对以比近似最速下降算法少的运算量实现与近似最速下降算法同等的辨识精度的自适应辨识系统进行说明。
[0052]
<系统结构>
[0053]
图1a及图1b是表示有关一实施方式的自适应辨识系统的系统结构的例子的图。
[0054]
图1a表示有关本实施方式的自适应辨识系统100的系统结构的一例。图1a所示的自适应辨识装置110除了图8b所示的以往的自适应辨识装置10的结构以外,还具备控制部114及存储部115等。具体而言,自适应辨识装置110具有自适应滤波器111、自适应算法执行部112、减法器113、控制部114及存储部115等。
[0055]
另外,在说明书的本文中,由于不能将表示向量及矩阵的字符用粗体字符表示,所以在本文中将向量及矩阵用标准字符表述。另一方面,在数式中,将向量及矩阵用粗体字符表述。因而,例如本文中的“向量x”对应于数式的粗体字符的x。关于矩阵及其他字符也是同样的。
[0056]
自适应滤波器111例如由自适应辨识装置110具备的dsp(digital signal processor,数字信号处理器)实现,是能够通过来自自适应算法执行部112的控制来变更系数向量w(n)的fir(finite impulse response,有限脉冲响应)滤波器等。
[0057]
自适应算法执行部112例如由自适应辨识装置110具备的dsp实现,基于辨识用输入信号x(n)及观测信号y(n),将自适应滤波器111的系数向量w(n)通过后述的自适应更新式进行更新。
[0058]
减法器113例如由自适应辨识装置110具备的dsp实现,基于观测信号y(n)、自适应滤波器111的输出信号输出错误信号e(n)。在本实施方式中不会将错误信号e(n)直接用于自适应更新,但为了观察自适应滤波器111的系数向量w(n)与应求出的传递系统h11有多接近的自适应进展程度而观测。
[0059]
控制部114例如由自适应辨识装置110所具备的计算机执行的程序、或自适应辨识装置110所具备的dsp等实现,具有如图2所示的功能结构。另外,关于控制部114的功能结构在后面叙述。
[0060]
存储部115例如由自适应辨识装置110所具备的存储器或储存设备等实现,存储后述的各种各样的信息及数据。
[0061]
图1b表示有关本实施方式的自适应辨识系统100的系统结构的另一例。如图1b所示,自适应辨识系统100的控制部114及存储部115也可以是自适应辨识装置110的外部的控制装置120。例如,控制装置120具有包括cpu(central processing unit,中央处理单元)、存储器、储存设备、通信接口等的计算机的结构,通过由cpu执行规定的程序,实现控制部114、存储部115等。
[0062]
<控制部的功能结构>
[0063]
图2是表示有关一实施方式的控制部的功能结构的例子的图。控制部114例如具有信号生成部201、设定部202及计算部203等。
[0064]
信号生成部201制作自适应辨识系统100的辨识用输入信号x(n)。另外,信号生成部201既可以在信号生成部201的内部生成辨识用输入信号x(n),也可以例如对自适应辨识装置110所具备的dsp进行控制而生成辨识用输入信号x(n)。
[0065]
(辨识用输入信号)
[0066]
这里,对信号生成部201生成的辨识用输入信号向量x(n)进行说明。
[0067]
如上述那样,近似最速下降算法的自适应更新式由以下数式表示。
[0068]
[数式1]
[0069][0070]
在该近似最速下降算法中,计算辨识用输入信号向量x(n)的自相关矩阵x(n)x(n)
t
的移动平均值、以及辨识用输入信号向量x(n)与观测信号y(n)的互相关向量x(n)y(n)的移动平均,并计算自相关矩阵的移动平均值与当前的自适应滤波器的系数向量w(n)的积。此外,该自适应更新式中,通过对自相关矩阵的移动平均值与当前的自适应滤波器系数向量的值的积加上互相关向量的移动平均值,来计算下次采样时的自适应滤波器系数向量。
[0071]
这里,自相关矩阵由以下数式表示。
[0072]
[数式2]
[0073][0074]
该矩阵由于对各要素进行移动平均的计算,所以它们的移动平均的计算量(运算量)变得特别多。因而,如果能够使自相关矩阵成为简单的形式,则能够大幅削减计算量。
[0075]
所以,信号生成部201为了使自相关矩阵成为简单的形式,生成包含基本频率的整数倍的频率成分、且满足pe(persistently exciting,持续激励)性条件的周期性的辨识用输入信号x(n)。
[0076]
例如,信号生成部201将基本频率的整数倍的多个正弦波状信号组合,生成仅包含基本频率的整数倍的频率成分的周期性信号,作为辨识用输入信号x(n)。此时,信号生成部201为了满足pe性的阶数,将与自适应滤波器111的抽头数对应的数量的、在无干扰的状况下保证了相干性的频率的正弦波状信号相加,生成辨识用输入信号x(n)。
[0077]
由此,信号生成部201能够生成包含基本频率的整数倍的频率、且满足pe性条件的周期性的辨识用输入信号x(n)。
[0078]
另外,关于满足pe性条件的周期性的辨识用输入信号x(n),通过将辨识用输入信号x(n)的基本频率的基本周期t设为计算移动平均的时间区间并将自相关矩阵进行移动平均,能够成为正则常数的矩阵。
[0079]
在对音响系统的应用上,优选的是,信号生成部201使被加在一起的多个正弦波状信号的各相位变化以使辨识用输入信号x(n)的信号波形不成为脉冲状,来生成辨识用输入信号x(n)。例如,信号生成部201使多个正弦波状信号的相位随机地变化。
[0080]
在图3中表示信号生成部201生成的辨识用输入信号x(n)的信号波形的图像。
[0081]
图3是表示有关一实施方式的辨识用输入信号的信号波形的图像的图。在图3的例子中,例如表示了将辨识模型设为8抽头的fir滤波器,将基本频率设为10hz,将30hz、40hz、50hz、60hz、70hz、80hz、90hz、100hz的余弦波进行合成而生成的辨识用输入信号x(n)的例子。在图3的例子中,信号生成部201将多个频率成分(余弦波)以随机相位合成而生成辨识
用输入信号x(n),由此,生成没有脉冲状的峰值的、基本周期t的周期性信号。
[0082]
这里,回到图2,继续说明控制部114的功能结构。
[0083]
设定部202将自适应辨识装置110的移动平均时间(自适应算法的移动平均时间)设定为辨识用输入信号x(n)的基本周期t。例如,设定部202在自适应辨识装置110的采样频率是1600hz、辨识用输入信号x(n)的基本频率是10hz的情况下,将移动平均次数m设定为m=160。由此,自适应辨识装置110的移动平均时间被设定为基本频率10hz的基本周期即0.1s。
[0084]
由此,将辨识用输入信号向量x(n)的自相关矩阵x(n)x(n)
t
进行移动平均后得到的矩阵,例如如由下式表示那样成为正则常数的矩阵。
[0085]
[数式3]
[0086][0087]
为了削减计算量,优选的是,计算部203预先计算将辨识用输入信号向量x(n)的自相关矩阵x(n)x(n)
t
进行了移动平均的矩阵,并进行固有值分解,计算进行了对角化的对角化矩阵,存储到存储部115等中。
[0088]
<自适应更新式>
[0089]
接着,对有关本实施方式的自适应算法的自适应更新式进行说明。
[0090]
对于上述的近似最速下降算法的自适应更新式,如果将步长计算和梯度计算分别进行变形,则可以表示为
[0091]
[数式4]
[0092][0093]
此外,在本实施方式中,通过使用被制作为满足上述的pe性条件的辨识用输入信号x(n),能够对在将辨识用输入信号向量x(n)的自相关矩阵x(n)x(n)
t
进行移动平均后得到的矩阵进行常数化。此外,常数化后的自相关矩阵可以通过固有值分解而如以下这样对角化。
[0094]
[数式5]
[0095][0096]
这里,l是辨识模型的抽头数。
[0097]
由此,有关本实施方式的自适应算法的自适应更新式可以表示为
[0098]
[数式6]
[0099][0100]
进而,如果对该式的两边从左边乘以正则矩阵p,则成为
[0101]
[数式7]
[0102][0103]
进而,如果从进行了基于正则矩阵p的线性变换的区域看,设为w'(n)=pw(n),x'(n)=px(n-1),则该式可以表示为
[0104]
[数式8]
[0105][0106]
这样,根据本实施方式,将辨识用输入信号向量x(n)的自相关矩阵x(n)x(n)
t
常数化、进而用正则矩阵p进行线性变换后的自适应滤波器系数向量是通过与由固有值构成的对角化矩阵d的积来求出。因而,根据本实施方式,能够以比近似最速下降算法少的运算量实现与近似最速下降算法同等的辨识精度。
[0107]
另外,由于自适应滤波器的系数向量w'(n)在用正则矩阵p进行线性变换后的区域中收敛,所以在求出实际的脉冲响应的情况下,通过对
[0108]
[数式9]
[0109]
w
′
(∞)=pw
opt
的两边从左乘以逆矩阵p
-1
而进行逆变换,从而成为
[0110]
[数式10]
[0111]
p-1
w
′
(∞)=w
opt
能够求出最优值w
opt
。
[0112]
<处理的流程>
[0113]
接着,对有关本实施方式的自适应辨识方法的处理的流程进行说明。
[0114]
图4是表示有关一实施方式的自适应辨识系统的处理的例子的流程图。该处理表示有关本实施方式的自适应辨识系统100执行的自适应辨识方法的整体的流程。
[0115]
在步骤s401中,控制部114的信号生成部201如上述那样,生成将基本频率的整数倍的频率成分组合以满足pe性条件的周期性的辨识用输入信号x(n)。
[0116]
例如,信号生成部201关于辨识用输入信号x(n),将基本频率(例如10hz)的整数倍的频率的正弦波状信号以自适应滤波器111的抽头数的数量进行组合,生成周期性的辨识用输入信号x(n)。
[0117]
此外,信号生成部201使多个正弦波状信号的相位互不相同,以使辨识用输入信号x(n)不成为脉冲状。例如,信号生成部201使多个正弦波状信号的相位随机地变化,生成如图3所示的周期性的辨识用输入信号x(n)。
[0118]
优选的是,信号生成部201决定辨识用输入信号x(n),求出矩阵d和矩阵p。例如,在
自适应滤波器111的抽头数是2的情况下,求出
[0119]
[数式11]
[0120][0121][0122]
此外,信号生成部201考虑基于矩阵p的线性变换,准备线性变换后的辨识用输入信号,
[0123]
[数式12]
[0124][0125][0126]
将线性变换后的辨识用输入信号例如以以下这样的形式存储到存储部115中。
[0127]
[数式13]
[0128]
x
′0(n)=p
00
x0(n)+p
01
x1(n)
[0129]
x
′1(n)=p
10
x0(n)+p
11
x1(n)
[0130]
优选的是,信号生成部201基于预先存储在存储部115中的辨识用输入信号,生成辨识用输入信号x(n),例如如图1a所示,向传递系统11、自适应滤波器111及自适应算法执行部112输入。
[0131]
在步骤s402中,控制部114的设定部202将自适应辨识装置110的移动平均时间(自适应算法的移动平均时间)设定为在步骤s201中生成的辨识用输入信号x(n)的基本周期t。
[0132]
例如,在自适应辨识装置110的采样频率是1600hz、辨识用输入信号x(n)的基本频率是10hz的情况下,将自适应辨识装置110的移动平均时间设定为基本频率10hz的基本周期t即0.1s。
[0133]
在步骤s403中,控制部114的计算部203计算对将在步骤s401中生成的辨识用输入信号向量x(n)的自相关矩阵x(n)x(n)
t
进行移动平均后的矩阵进行了对角化的对角化矩阵。
[0134]
另外,该处理只要在步骤s404的自适应更新处理之前进行就可以。例如,计算部203也可以在生成辨识用输入信号x(n)并向存储部115存储时等计算对角化矩阵并预先存储到存储部115中。
[0135]
在步骤s404中,自适应算法执行部112使用计算了辨识用输入信号向量x(n)与观测信号y(n)的互相关向量x(n)y(n)的移动平均的移动平均值、和计算部203计算出的对角化矩阵,更新自适应滤波器111的系数。例如,在自适应滤波器111的抽头数是2的情况下,将
[0136]
[数式14]
[0137][0138][0139]
作为自适应更新式,执行自适应更新处理。
[0140]
这里,例如如果假设移动平均的加法处理是环形缓冲方式,且进行3次加法处理(数据值加法、减法、指针增加),则1次自适应所需要的计算数(运算量)如下。
[0141]
梯度估计:乘法6次,加法8次
[0142]
步长调整:乘法2次
[0143]
自适应更新:加法2次
[0144]
图5是表示有关一实施方式的自适应辨识系统的计算量的例子的图。该图表示在自适应滤波器111的抽头数是2抽头的情况、128抽头的情况、l抽头(l是2以上的整数)的情况下的、近似最速下降算法的计算量和本实施方式的计算量。
[0145]
如图5所示,在自适应滤波器111的抽头数是2抽头的情况下,有关本实施方式的自适应算法的计算量也比近似最速下降算法的计算量少。
[0146]
进而,在实际的自适应辨识系统100中,考虑自适应滤波器111的抽头数至少需要128抽头。在此情况下,如图5所示,可知有关本实施方式的自适应算法的计算量与近似最速下降算法的计算量相比计算数大幅减少。此外,有关本实施方式的自适应算法由于基于近似最速下降算法,所以能够得到与近似最速下降算法同等的辨识精度。
[0147]
因而,根据本实施方式,在自适应辨识系统100中,能够以比近似最速下降算法少的运算量(计算量)得到与近似最速下降算法同等的辨识精度。
[0148]
以上,对本发明的实施方式进行了说明,但本发明并不限定于上述的实施方式,在权利要求书所记载的本发明的主旨的范围内能够进行各种各样的变形或变更。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1