钨极气体保护电弧焊训练系统的制作方法
[0001]
本公开总体上涉及钨极气体保护电弧焊训练系统。
背景技术:
[0002]
焊接行业缺少经验丰富和熟练的操作者。另外,即使是经验丰富的焊工也难以在整个焊接过程中维持重要的焊接技术(例如,焊炬工作角度、焊炬行进角度、接触端头到工件的距离、行进速度、对准等)。焊接训练系统使经验丰富和经验不足的焊接操作者都可以进行练习,以产生高质量的焊接。
[0003]
通过这类系统与在本申请的其余部分参照附图阐述的本公开相比较,常规和传统的方法的局限性和缺点对本领域技术人员而言将变得显而易见。
技术实现要素:
[0004]
本公开涉及基本上如至少一个附图所示的和/或结合至少一个附图所描述的并且如权利要求中更完整地阐述的钨极气体保护电弧焊训练系统。
[0005]
从以下说明书、权利要求和附图,将更加充分地理解本公开的这些和其他优点、方面和新颖特征以及本公开的所示示例的细节。
附图说明
[0006]
图1示出了根据本公开的各方面的钨极气体保护电弧焊(gtaw)训练系统的示例。
[0007]
图2是进一步示出根据本公开的各方面的图1的gtaw训练系统的示例部件的框图。
[0008]
图3是图示了根据本公开的各方面的可以与图1的gtaw训练系统一起使用的示例gtaw训练程序的流程图。
[0009]
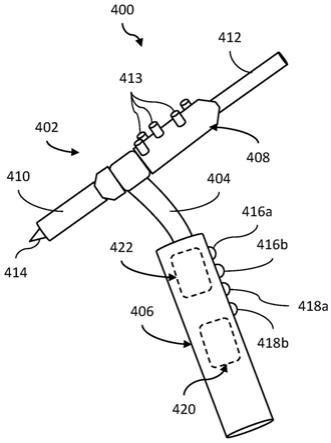
图4示出了根据本公开的各方面的可以在图1的示例gtaw训练系统中使用的示例gtaw焊炬。
[0010]
图5a示出了根据本公开的各方面的可以在图1的示例gtaw训练系统中使用的示例焊条和焊条附件。
[0011]
图5b示出了根据本公开的各方面的可以在图1的示例gtaw训练系统中使用的另一示例焊条和焊条附件。
[0012]
图5c示出了根据本公开的各方面的可以在图1的示例gtaw训练系统中使用的另一示例焊条和焊条附件。
[0013]
图6是示出根据本公开的各方面的图1的gtaw训练系统的接线盒的示例部件与图1的gtaw训练系统的其他部件的相互关系的框图。
[0014]
图7是图示了根据本公开的各方面的可以与图6的接线盒一起使用的示例盒控制方法的流程图。
[0015]
附图不一定按比例绘制。在适当情况下,相同或相似的附图标记用于在附图中表示相似或相同的要素。例如,利用字母的附图标记(例如,传感器104a、传感器104b)表示不
具有该字母的相同附图标记(例如,传感器104)的实例。
具体实施方式
[0016]
本公开的一些示例涉及一种钨极气体保护电弧焊(gtaw)训练系统,其包括:gtaw焊炬,所述gtaw焊炬包括第一组视觉标记;被配置为附接到焊条的附件,所述附件包括第二组视觉标记;一个或多个传感器,所述一个或多个传感器被配置为检测所述第一组视觉标记和所述第二组视觉标记;以及与所述一个或多个传感器通信的控制电路系统,所述控制电路系统被配置为:基于所述一个或多个传感器对所述第一组视觉标记的检测,确定所述gtaw焊炬的第一位置或所述gtaw焊炬的第一取向;并且基于所述一个或多个传感器对所述第二组视觉标记的检测,确定所述焊条的第二位置或所述焊条的第二取向。
[0017]
在一些示例中,所述控制电路系统进一步被配置为基于所述gtaw焊炬的第一位置或第一取向来确定一个或多个焊炬参数,并基于所述焊条的第二位置或第二取向来确定一个或多个焊条参数。在一些示例中,所述一个或多个焊炬参数包括所述gtaw焊炬的工作角度或行进角度中的一个或多个。在一些示例中,所述一个或多个焊条参数包括所述焊条的工作角度、浸入参数或行进角度中的一个或多个。在一些示例中,所述控制电路系统进一步被配置为基于所述gtaw焊炬的第一位置或第一取向来确定所述一个或多个焊炬参数,并基于所述焊条的第二位置和第二取向来确定所述一个或多个焊条参数,其中,所述一个或多个焊炬参数包括所述gtaw焊炬的电弧长度、行进速度或对准,并且所述一个或多个焊条参数包括一个或多个浸入参数、一个或多个摆动参数、所述焊条的对准、所述焊条的工作角度或所述焊条的行进角度。
[0018]
在一些示例中,所述系统进一步包括显示屏,并且所述控制电路系统进一步被配置为在所述显示屏上显示与焊接参数数据时间同步的所述一个或多个焊炬参数和所述一个或多个焊条参数的图形表示。在一些示例中,所述控制电路系统被配置为基于对所述第二组视觉标记的检测来确定向量,所述控制电路系统进一步被配置为基于所述向量来确定所述一个或多个焊条参数。在一些示例中,所述附件包括具有多个平坦的互连表面的物体,该物体具有被配置用于容纳所述焊条的通孔。在一些示例中,其中,所述附件包括连接在一起的两个球形标记。在一些示例中,所述第二组视觉标记以限定刚性体的方式布置。
[0019]
本公开的一些示例涉及一种操作钨极气体保护电弧焊(gtaw)系统的方法,所述方法包括:经由一个或多个传感器检测gtaw焊炬的第一组视觉标记;经由所述一个或多个传感器,检测附接到焊条的附件的第二组视觉标记;经由控制电路系统,基于所述一个或多个传感器对所述第一组视觉标记的检测,确定所述gtaw焊炬的第一位置或所述gtaw焊炬的第一取向;以及经由所述控制电路系统,基于所述一个或多个传感器对所述第二组视觉标记的检测,确定所述焊条的第二位置或所述焊条的第二取向。
[0020]
在一些示例中,所述方法进一步包括:经由所述控制电路系统,基于所述gtaw焊炬的第一位置或第一取向来确定一个或多个焊炬参数,并经由所述控制电路系统,基于所述焊条的第二位置或第二取向来确定一个或多个焊条参数。在一些示例中,所述一个或多个焊炬参数包括所述gtaw焊炬的工作角度或行进角度中的一个或多个。在一些示例中,所述一个或多个焊条参数包括所述焊条的工作角度、浸入参数或行进角度中的一个或多个。在一些示例中,所述方法进一步包括:将所述一个或多个焊炬参数和所述一个或多个焊条参
数与焊接参数数据进行时间同步。在一些示例中,所述一个或多个焊炬参数是基于所述gtaw焊炬的第一位置或第一取向来确定的,并所述一个或多个焊条参数是基于所述焊条的第二位置和第二取向来确定的,其中,所述一个或多个焊炬参数包括gtaw焊炬的电弧长度、行进速度或所述对准,并且所述一个或多个焊条参数包括一个或多个浸入参数、一个或多个摆动参数、所述焊条的对准、所述焊条的工作角度或所述焊条的行进角度。
[0021]
在一些示例中,所述方法进一步包括:在显示屏上显示与所述焊接参数数据时间同步的所述一个或多个焊炬参数和所述一个或多个焊条参数的图形表示。在一些示例中,所述附件包括具有多个平坦的互连表面的物体,该物体具有被配置用于容纳所述焊条的通孔。在一些示例中,所述附件包括连接在一起的两个球形标记。在一些示例中,所述一个或多个传感器包括一个或多个相机。
[0022]
本公开的一些示例涉及钨极气体保护电弧焊(gtaw)训练系统。尽管存在用于气体金属电弧焊(gmaw)系统和有保护的金属电弧焊(smaw)系统的现有焊接训练系统,但是gtaw系统在焊接训练方面具有其自身的特殊难度。例如,在gmaw和/或smaw系统中,操纵焊接“焊炬”或“焊枪”也操纵了填充材料。因此,改变“焊炬”或“焊枪”的位置和/或取向也改变了填充材料的位置和/或取向。在gtaw系统中,填充材料与焊炬或焊枪分开(和/或单独操纵)。因此,改变“焊炬”或“焊枪”的位置和/或取向不会改变填充材料的位置和/或取向。另外,gmaw和/或smaw系统中的填充材料还充当电极,而gtaw系统中的填充材料与电极完全分开。此外,在gmaw和/或smaw系统中,用于产生电弧的电功率通常是连续的(例如,在smaw的情况下)或经由焊炬或焊枪上的扳机激活(例如,在gmaw的情况下)。在gtaw系统中,用于产生电弧的电功率可以使用与焊炬/焊枪和填充材料都分开的遥控器(例如,脚踏板)来激活(和/或渐增地控制)。
[0023]
本公开设想了专用于钨极气体保护电弧焊的焊接训练系统。在一些示例中,本公开的gtaw训练系统包括gtaw焊炬和焊条附件,它们具有一个或多个标记,以便于检测和/或跟踪gtaw焊炬和焊条的位置和/或取向。gtaw训练系统的一个或多个传感器被配置为捕获与gtaw焊炬和/或焊条附件的标记有关的数据。gtaw训练系统的训练控制器可以使用标记和/或传感器数据来跟踪和/或确定gtaw焊炬和/或焊条的位置、取向和/或移动。可以结合焊接参数数据来分析位置、取向和/或移动,以提供训练反馈。
[0024]
在一些示例中,所述gtaw训练系统的接线盒在训练期间协调将焊接型功率递送到gtaw焊炬。在一些示例中,可以以不同的程度激活遥控器(例如,脚踏板)以命令从焊接型电力供应器供应不同水平的焊接型功率。在一些示例中,所述接线盒可以在训练期间选择性地启用或禁用所述遥控器与焊接型电力供应器之间的通信。在一些示例中,该选择性启用/禁用可以基于所述gtaw训练系统是处于实况电弧模式还是模拟模式。
[0025]
图1示出了gtaw训练系统100的示例。在一些示例中,gtaw训练系统100中的一部分或全部可以包括虚拟现实、增强现实和/或混合现实的gtaw训练系统100。如图所示,gtaw训练系统100包括焊接台102、若干传感器104、焊接型电力供应器108、接线盒600、遥控器140、gtaw焊炬400、焊条112以及焊条附件500。
[0026]
图5a示出了gtaw训练系统100的示例焊条附件500a。在图5a的示例中,焊条附件500a包括长方体502。如图所示,长方体508具有若干平坦的互连面。尽管在图5a的示例中示出为长方体502,但在一些示例中,焊条附件500a可以是具有若干平坦的互连面的不同形状
的物体。如图所示,长方体502在一个面上具有孔口504。如图所示,孔口504通向通道506,该通道部分地延伸过长方体502,并在长方体502的端部508处或端部508之前终止。在一些示例中,孔口504和/或通道506的尺寸被设置成舒适地和/或紧密地容纳焊条112的一部分,以便将焊条附件500a以摩擦方式保持在焊条112上。
[0027]
在图5a的示例中,长方体502包括若干附件标记513。如图所示,附件标记513是无源标记,例如反射器。在一些示例中,附件标记513也可以是有源标记,例如发光二极管(led)。在图5a的示例中,在长方体502的每个面上设置两个附件标记513。在一些示例中,可以在每个面上设置更多或更少的附件标记513。在一些示例中,与长方体502的相邻面上的任何两个附件标记513(例如,513a与513c/513d,或513b与513c/513d)之间的距离相比,长方体502的每个相同面上的两个附件标记513(例如,513a和513b)之间的距离可以是唯一的。以这种方式,gtaw训练系统100能够通过比较附件标记513之间的距离来确定哪些附件标记513在长方体502的同一面上,从而确定哪对(和/或哪组)附件标记513限定了与焊条112的轴线平行的轴线。一旦知道了平行轴线,gtaw训练系统100就可以向gtaw焊炬400(和/或钨电极414的端头)和/或工件110投影该轴线,以确定焊条可能与电弧、gtaw焊炬400(和/或钨电极414的端头)和/或工件110相互作用所在的取向和/或角度112。另外,在一些示例中,可以以构成刚性体的方式布置附件标记513,gtaw训练系统100可以使用该刚性体来确定相对位置和取向两者。
[0028]
图5b示出了另一示例焊条附件500b。在图5b的示例中,焊条附件500包括经由中空管522连接在一起的两个球体520。如图所示,球体520a包括开口524。在一些示例中,开口包括与球体520a中的通孔连通的入口,该通孔与中空管522同轴,由此焊条112可以穿过开口524(和/或球体520a)插入中空管522中。在一些示例中,延伸穿过中空管522的通道可以在球体520b处终止。在一些示例中,通道可以部分地延伸过球体520b。在一些示例中,孔口524、延伸过球体520a(和/或球体520b)的通孔、和/或中空管522的尺寸可以被设置成舒适地和/或紧密地容纳焊条112的一部分,以便将焊条附件500b以摩擦方式保持在焊条112上。在一些示例中,每个球体520可以包括有源或无源标记,以便于由gtaw训练系统100进行检测(和/或轴线投影)。
[0029]
图5c示出了另一示例焊条附件500c。在图5c的示例中,焊条附件500包括经由实心杆532而不是中空管连接在一起的两个球体530。替代地,中空管534经由从球体530a延伸的延伸杆536附接到球体530a。在图5c的示例中,延伸杆536与实心杆532同轴。在一些示例中,实心杆532可以延伸过球体530a,并且延伸杆536可以是实心杆532的一部分。如图所示,中空管534包括被配置为容纳焊条112的开口538。在一些示例中,开口538和/或中空管534的尺寸可以被设置成舒适地和/或紧密地容纳焊条112的一部分,以便将焊条附件500c以摩擦方式保持在焊条112上。在一些示例中,每个球体530可以是有源或无源标记,以便于由gtaw训练系统100进行检测(和/或轴线投影)。
[0030]
在图1的示例中,示出了佩戴有具有面罩124的焊接头具106的操作者116在焊接台102和若干工件110附近操纵gtaw焊炬400和焊条112。如图所示,gtaw焊炬400经由焊接缆线联接至接线盒600。尽管在图1中示出了一个gtaw焊炬400,但在一些示例中,gtaw训练系统100可以包括多个gtaw焊炬400。在图1的示例中,进一步地,感测设备105(例如,加速度计)与gtaw焊炬400整合在一起,以便于跟踪gtaw焊炬400的位置、取向和/或移动。
[0031]
图4示出了图1的示例gtaw训练系统100的示例gtaw焊炬400的放大图。在图4的示例中,gtaw焊炬400包括经由颈部404连接至手柄406的头部402。在一些示例中,颈部404可以是刚性的。在一些示例中,颈部404可以是柔性的,以允许头部402相对于手柄406被重新定向和/或调节。如图所示,焊炬头部402包括附接到喷嘴410的本体408、以及从本体408的后部延伸的后帽(back cap)412。在一些示例中,本体408可以与gtaw焊炬400分开,使得本体408可以从不同的焊炬拆卸和/或附接到不同的焊炬。
[0032]
在图4的示例中,钨电极414从喷嘴410伸出。在喷嘴410内,电极414可以由筒夹(未示出)保持。在操作中,手柄406可以连接至将焊接型功率和/或气体输送至gtaw焊炬400的缆线。在gtaw焊炬400内,可以将焊接型功率输送至钨电极414以形成电弧。同样地可以将气体输送到焊炬喷嘴410以在电弧附近被分配。在一些示例中,gtaw焊炬400可以被配置为不能进行实际焊接并且不需要钨电极414的仿真焊炬。
[0033]
在图4的示例中,焊炬头部402包括附接到焊炬本体408的若干焊炬标记413。通过将焊炬标记413附接到本体408(和/或头部402),即使头部402的位置/取向经由颈部404相对于手柄406被重新定向和/或经过调节,也能确保焊炬标记413与钨电极414保持固定的空间关系。在一些示例中,gtaw训练系统100可以基于检测到的焊炬标记413的位置和/或取向,使用该固定的空间关系来预测、估计和/或近似计算钨电极414的位置和/或取向。
[0034]
在一些示例中,形成在本体408的实体表面上的焊炬标记413的固定布置可以限定刚性体。在一些示例中,由焊炬标记413限定的刚性体可以允许gtaw训练系统100确定gtaw焊炬400的位置和取向。尽管在图4的示例中,所有焊炬标记413在一个组中,但在一些示例中,焊炬标记413可以被布置在多个组中,其中,每个组具有至少三个焊炬标记413(以便限定刚性体)。在一些示例中,多组焊炬标记413可以通过各种各样的角度和取向促进一致和/或稳健的跟踪。在一些示例中,焊炬标记413可以包括或保持在本体408中的孔、腔穴、容口和/或其他结构内。
[0035]
在一些示例中,一个或多个焊炬标记413可以包括无源标记,例如反射器、图案标记和/或其他非供电的标记。在一些示例中,一个或多个焊炬标记413可以包括有源标记,例如发光标记(例如,红外发光二极管(led))。在一些示例中,gtaw焊炬400上的有源标记可以更好地用于实况焊接,因为(与无源标记相比)需要较少的相机曝光即可捕获有源标记。较短的曝光时间可以导致与gtaw焊炬400附近的其他光源(例如,焊接电弧、火花、飞溅物等)产生干扰的较低风险。在焊炬标记413是有源标记的一些示例中,焊炬标记413可以通过附接到手柄406的缆线(例如,从接线盒600)和/或从gtaw焊炬400的内部电源(例如,手柄406或头部402内的电池)接收功率。在焊炬标记413是有源标记的一些示例中,响应于一个或多个控制信号(例如,来自接线盒600),可以选择性地激活和/或停用各个焊炬标记413(和/或各组焊炬标记413)。
[0036]
在图4的示例中,gtaw焊炬400包括焊炬输入416、焊炬输出418和反馈机构420。尽管在图4的示例中示出了两个焊炬输入416和两个焊炬输出418,但在一些示例中,gtaw焊炬400可以包括更多或更少的焊炬输入416和/或焊炬输出418。在一些示例中,焊炬输入416可以包括按钮、开关、拨盘、旋钮、麦克风和/或其他适当的输入机构。在一些示例中,焊炬输出418可以包括视觉输出(例如,显示屏、灯等)和/或音频输出(例如,扬声器)。在一些示例中,反馈机构420可以包括触觉反馈机构和/或振动机构。
[0037]
如图所示,gtaw焊炬400进一步包括与焊炬输入416和/或焊炬输出418电连通的内部焊炬电路系统422。在一些示例中,内部焊炬电路系统422可以被配置为驱动、控制和/或以其他方式促进焊炬输入416、焊炬输出418、焊炬标记413和/或反馈机构420的操作。在一些示例中,gtaw焊炬400可以包括内部电源,以向焊炬输入416、焊炬输出418、反馈机构420、焊炬标记413和/或焊炬电路系统422供电。在一些示例中,gtaw焊炬400可以通过(例如,与接线盒600的)缆线连接接收功率,以向焊炬输入416、焊炬输出418、反馈机构420、焊炬标记413和/或焊炬电路系统422供电。
[0038]
在一些示例中,操作者116可以使用焊炬输入416、焊炬输出418和/或反馈机构420向gtaw训练系统100提供输入,并从gtaw训练系统接收输出和/或反馈。例如,在gtaw训练系统100的设置/校准期间,操作者116可以使用一个或多个焊炬输入416来选择实况电弧模式或模拟模式。在这样的示例中,gtaw焊炬400可以将指示这种选择的一个或多个信号发送到接线盒600和/或训练控制器200。作为另一示例,接线盒600和/或训练控制器200可以将指示模式(例如,实况电弧或模拟)的一个或多个信号发送至gtaw焊炬400,并且一个或多个焊炬输出418可以将适当的模式指示提供至操作者116。作为另一示例,接线盒600(和/或焊炬电路系统422)可以响应于一些训练结果(例如,高分、低分、行进速度太快/慢、电弧长度太大/小、角度太大/小、模式选择成功等)来控制反馈机构420以提供反馈(例如,振动)。
[0039]
在图1的示例中,遥控器140也经由缆线联接至接线盒600。如图所示,遥控器140是可移动的脚踏板。在一些示例中,遥控器140可以是开关、扳机、按钮、操纵杆、拨盘和/或(例如,安装到gtaw焊炬400的)其他合适的控制机构。在一些示例中,遥控器140被配置为检测可移动踏板的激活(例如,踩下)和/或移动,并且基于激活程度和/或移动量(和/或其指示)输出一个或多个控制信号。在一些示例中,遥控器140可以将一个或多个控制信号传送到接线盒和/或焊接型电力供应器108。在一些示例中,操作者116可以不同程度将可移动踏板压下和/或移动,以命令将不同目标水平的焊接型功率递送到gtaw焊炬400,并且焊接型电力供应器108可以相应地解释和/或响应来自遥控器140的代表性信号。在一些示例中,遥控器140可以包括实现遥控信号的无线传送(例如,到接线盒和/或焊接型电力供应器108)的无线通信电路系统。在一些示例中,被配置用于与无线通信电路系统通信的无线接收器可以替代地经由缆线联接至接线盒600,而不是遥控器140本身联接至接线盒600。
[0040]
在图1的示例中,gtaw焊炬400和遥控器140通过接线盒600选择性地联接至焊接型电力供应器108。如图所示,焊接型电力供应器108还通过接线盒600选择性地联接至夹具114。在一些示例中,焊接型电力供应器108可以经由缆线直接联接至夹具114。尽管为了简化起见,仅示出了一根缆线用于将接线盒600连接至焊接型电力供应器108缆线,但在一些示例中,可以由多根缆线形成连接。
[0041]
在图1的示例中,夹具114附接到焊接台102的支撑平台120和焊接型电力供应器108。在一些示例中,夹具114可以附接到工件110、焊接台102的某个其他部分或某个其他设备,而不是附接到支撑平台120。尽管在图1的示例中示出为连接至电力供应器108,但在一些示例中,夹具114可以替代地连接至接线盒600。在实况焊接期间,支撑平台120、(多个)工件110、夹具114、gtaw焊炬400和/或将夹具114和/或gtaw焊炬400连接至焊接型电力供应器108的缆线可以形成闭合回路,可以通过该闭合回路来输送焊接型输出功率。
[0042]
在图1的示例中,焊接型电力供应器108包括(和/或联接至)气体供应器142。在一
些示例中,气体供应器142向gtaw焊炬400供应保护气体和/或保护气体混合物。如本文中所用,保护气体可以指可以被提供至电弧和/或焊池以便提供特定的局部气氛(例如,保护电弧、提高电弧稳定性、限制金属氧化物的形成、提高金属表面的润湿、改变焊接熔覆物的化学性质等)的任何气体(例如,co2、氩气)或气体混合物。
[0043]
在图1的示例中,焊接型电力供应器108还包括操作者接口144。在图1的示例中,操作者接口144包括焊接型电力供应器108上的一个或多个可调节输入(例如,旋钮、按钮、开关、键等)和/或输出(例如,显示屏、灯、扬声器等)。在一些示例中,操作者116可以使用操作者接口144来输入和/或选择焊接型电力供应器108的一个或多个焊接参数(例如,电压、电流、气体类型、送丝速度、工件材料类型、填料类型等)和/或焊接操作。在一些示例中,操作者接口144可以进一步包括被配置为与一个或多个外部存储器设备(例如,软盘、压缩盘、数字视频盘、闪存驱动器等)连接(和/或容纳外部存储器设备)的一个或多个插口。在一些示例中,操作者116可以另外地或可替代地使用焊接台102的一个或多个输入设备130和/或gtaw焊炬400的一个或多个焊炬输入416,而不是操作者接口144。
[0044]
在图1的示例中,焊接型电力供应器108包括功率转换电路系统132,该功率转换电路系统被配置为接收输入功率(例如,来自市电、发电机等)并将该输入功率转换成焊接型输出功率。如图所示,焊接型电力供应器108进一步包括电耦接到功率转换电路系统132和/或被配置为控制该功率转换电路系统的控制电路系统134。在一些示例中,控制电路系统134可以包括处理电路系统(和/或一个或多个处理器)以及模拟和/或数字存储器。在一些示例中,控制电路系统134被配置为控制功率转换电路系统132,从而确保功率转换电路系统132产生适当的焊接型输出功率以实施目标焊接型操作。
[0045]
在一些示例中,控制电路系统134还电耦接到气体供应器142和/或被配置为控制该气体供应器。在一些示例中,焊接型电力供应器108可以控制气体供应器142以输出目标类型和/或量的气体。例如,控制电路系统134可以控制与气体供应器142连通的阀,以调节被递送到gtaw焊炬400的气体。
[0046]
在gtaw训练系统的实况电弧模式期间,当操作者116激活遥控器140时,可以启动实况焊接操作(和/或焊接过程和/或焊接会话)。在这样的示例中,指示激活的一个或多个控制信号可以从遥控器140开始通过接线盒600发送到焊接型电源108。焊接型电力供应器108的控制电路系统134可以解释控制信号并控制功率转换电路系统132以(至少部分地)基于控制信号来输出焊接型功率。由焊接型电力供应器108提供的焊接型功率可以施加到gtaw焊炬400的电极414,以便在电极414与一个或多个工件110之间产生焊接电弧。电弧的热量可以熔化焊条112和/或工件110的一部分,由此产生熔融焊池。(例如,由操作者导致的)gtaw焊炬400和/或焊条112的移动可以移动焊接电弧和/或焊池,从而形成一个或多个焊缝111。当焊接操作完成时,操作者116可以停用遥控器140。
[0047]
在gtaw训练系统100的模拟模式期间,当操作者116激活遥控器140和/或gtaw训练系统100的某个其他输入(例如,输入设备130和/或焊炬输入416)时,可以启动模拟焊接操作(和/或焊接过程和/或焊接会话)。在这样的示例中,可以将指示激活的一个或多个控制信号从遥控器140发送到接线盒600,该接线盒可以将控制信号转发到训练台102(同时防止控制信号到达焊接型电力供应器108,如以下进一步讨论的)。训练台102然后可以模拟焊接型功率、焊接电弧、熔融焊池和/或焊接操作的其他方面。当焊接操作完成时,操作者116可
以停用遥控器140。
[0048]
在一些示例中,接线盒600和/或焊接型电力供应器108可以在焊接过程期间检测与焊接型电力供应器108、夹具117和/或gtaw焊炬400有关的某些焊接参数数据。在一些示例中,这种焊接参数数据可以被传送到焊接台102,该焊接台可以将焊接参数数据用于训练分析和/或反馈。在一些示例中,到焊接台102的这种传送可以实时发生、在焊接操作期间周期性地发生、和/或在焊接操作完成之后发生。
[0049]
在图1的示例中,焊接台102包括支撑平台120,用于为一个或多个工件110和/或各种训练设备提供支撑。在一些示例中,支撑平台120可以包括槽和/或孔口以辅助定位和/或定向(多个)工件110。在一些示例中,(多个)工件110可以包括延伸部,该延伸部被配置为延伸到一个或多个槽和/或孔口中,以使工件110与一个或多个槽和/或孔口对准。在一些示例中,(多个)工件110、槽和/或孔口的位置和/或取向可以用于校准gtaw训练系统100。例如,可以将被配置为由一个或多个传感器104感测的校准设备插入孔口和/或槽中,同时提供至gtaw训练系统100的用户输入指示已将校准设备插入孔口和/或槽中。在一些示例中,gtaw焊炬400和/或焊条附件500可以用作校准设备。在一些示例中,焊接平台120可以另外地或可替代地包括一个或多个发射器,这些发射器被配置为将图案发射到支撑平台120、工件110、gtaw焊炬400和/或操作者116上。发射器可以发射红外、可见和/或紫外光谱的图案,以由一个或多个传感器104进行检测,从而校准支撑平台120相对于一个或多个传感器104的位置和/或取向。
[0050]
在图1的示例中,焊接台102进一步包括臂126,该臂连接至支撑平台120并从支撑平台竖直地延伸。具有显示屏129的显示监视器128连接至臂126。在一些示例中,显示屏129可以被配置为显示与焊接训练相关联(例如,对应于gtaw训练系统100)的焊接训练数据和/或屏幕。在一些示例中,保护罩可以位于显示屏上方,以阻止某些环境元素(例如,焊接飞溅物、烟、火花、热等)接触显示屏129。在一些示例中,显示监视器128可以包括附加的输出机构,例如音频扬声器。
[0051]
在图1的示例中,架子127也附接到臂126。架子127支撑焊接台102的若干输入设备130。如图所示,输入设备130包括鼠标和键盘。在一些示例中,可以提供附加的输入设备130,例如一个或多个麦克风。在一些示例中,显示屏129可以是触摸屏,并且可以进一步被认为是输入设备130。在一些示例中,gtaw焊炬400的焊炬输入416和/或焊条附件500也可以用作输入设备130。
[0052]
在图1的示例中,焊接台102进一步包括附接到臂126的传感器组件122。如图所示,传感器组件122包括朝向平台120、操作者116、焊条112和/或gtaw焊炬400定向的多个传感器104a。在一些示例中,传感器组件122可以是可调节的,诸如经由一个或多个旋钮和/或其他调节机构调节。在一些示例中,传感器组件102(和/或传感器104a)可以被配置为在焊接操作期间记录与焊接环境(和/或传感器104的视野)中的物体相关的传感器数据。
[0053]
在图1的示例中,gtaw训练系统100还包括被配置为记录与焊接环境中(和/或传感器104的视野中)的物体相关的传感器数据的若干其他传感器104。如图所示,除了传感器104a之外,gtaw训练系统100还包括附接至焊接头具106的传感器104b以及位于焊接环境周围的传感器104c。传感器104的这种布置可以使一些传感器104能够在其他传感器104被遮挡时监测焊接环境(例如,跟踪物体的移动)。
[0054]
在一些示例中,传感器104可以包括例如运动传感器、深度传感器、相机(例如,红外相机、可见光谱相机、高动态范围相机等)、声音传感器、光传感器和/或其他合适的传感器。在一些示例中,由传感器104捕获的传感器数据可以包括一个或多个图像、视频、声音、温度、无线电波、热波、辐射测量值和/或其他合适的数据。在一些示例中,该传感器数据可以允许焊接台102在焊接操作期间跟踪、检测和/或记录焊接环境中的物体(例如,操作者116、焊条112、焊条附件500、gtaw焊炬400、(多个)工件110等)的位置、取向和/或移动。
[0055]
在图1的示例中,工件110包括被配置为由一个或多个传感器104检测和/或由gtaw训练系统100跟踪的标记113。在一些示例中,支撑平台120还可以包括内置和/或附接到支撑平台的一个或多个标记,以在没有单独的校准设备的情况下校准支撑平台120相对于一个或多个传感器的位置和/或取向。在一些示例中,标记113可以是无源标记,例如反射性标记。在一些示例中,标记113可以是有源标记,例如发光标记(例如,发光二极管(led))。在一些示例中,标记113、焊炬标记413和/或附件标记513(和/或球体520/530)可以辅助gtaw训练系统100(例如,经由传感器104)跟踪gtaw焊炬400、焊条112和/或(多个)工件110,和/或确定gtaw焊炬400、焊条112和/或(多个)工件110的位置和/或取向。
[0056]
在一些示例中,传感器104可以通信地耦接至焊接台102的训练控制器200。例如,传感器104可以包括通信电路系统,以促进与训练控制器200的有线和/或无线通信。在一些示例中,传感器104被配置为例如经由一个或多个信号将传感器数据(例如,图像数据、声音数据、所感测的数据、六自由度(6dof)数据等)提供至训练控制器200。在一些示例中,传感器104进一步被配置为从训练控制器200接收数据(例如,配置数据、设置数据、命令、寄存器设置等)。在图1的示例中,训练控制器200被设置在焊接台102的机柜121内。
[0057]
在图2的示例中,训练控制器200耦接至传感器104、显示监视器128、输入设备130和接线盒600和/或与它们通信。如图所示,接线盒600进而联接至gtaw焊炬400、遥控器140和焊接型电力供应器108和/或与它们通信。在一些示例中,接线盒600可以另外地联接至夹具114和/或与其通信。
[0058]
在一些示例中,训练控制器200可以包括模拟和/或分立电路系统和/或一个或多个数字计算系统。在图2的示例中,训练控制器200包括存储器电路系统206、处理电路系统204和输入/输出(i/o)电路系统202。在一些示例中,i/o电路系统202可以包括用于与其他系统进行通信的通信电路系统。在一些示例中,通信电路系统可以包括一个或多个无线适配器、无线卡、缆线适配器、线路适配器、加密狗、射频(rf)设备、无线通信设备、蓝牙设备、符合ieee 802.11的设备、wifi设备、蜂窝设备、gps设备、以太网端口、网络端口、避雷缆线端口、缆线端口等。在一些示例中,通信电路系统可以被配置为经由一个或多个有线介质和/或协议(例如,(多个)以太网缆线、(多个)通用串行总线缆线等)和/或无线介质和/或协议(例如,近场通信(nfc)、超高频无线电波、ieee 802.11x、zigbee、hart、lte、z-wave、无线hd、wigig等)来促进通信。在一些示例中,i/o电路系统202可以另外包括用于与耦接至训练控制器200和/或与其通信的各种设备(诸如例如传感器104、gtaw焊炬400、遥控器140、显示监视器128、电力供应器108和/或输入设备130)接口连接的电路系统。
[0059]
在一些示例中,处理电路系统204包括一个或多个处理器,用于执行存储在存储器206中的机器可读指令(和/或处理器可执行指令)。在一些示例中,存储器206存储机器可读指令,这些机器可读指令实现耦接至训练控制器200和/或与其通信的各种设备的一部分或
全部功能。在图2的示例中,存储器206还存储焊接训练程序300。
[0060]
图3是图示了训练控制器200的示例焊接训练程序300的流程图。在一些示例中,可以用存储在训练控制器200的存储器206中和/或由处理电路系统204执行的机器可读(和/或处理器可执行)指令来实施焊接训练程序300。在图3的示例中,焊接训练程序300从框302开始。在框302处,焊接训练程序300执行某些设置和/或校准操作。例如,焊接训练程序300可以使用来自传感器104的传感器数据来跟踪一个或多个标记和/或校准工具,并对焊接台102、gtaw焊炬400和/或焊条附件500执行必要的校准。作为另一示例,焊接训练程序300可以响应于从输入设备130接收到指示对模拟模式或实况电弧模式的选择的一个或多个信号来设置gtaw训练系统100的模式。作为另一示例,焊接训练程序300可以响应于从输入设备130接收到指示对一个或多个焊接操作、焊接训练活动、设置和/或参数的选择的一个或多个信号来设置焊接操作、焊接训练活动、设置和/或参数。作为另一示例,焊接训练程序300可以响应于从输入设备130接收到指示用户登录和/或用户证书的一个或多个信号来访问用户信息(和/或相应的特权、许可、授权的焊接操作/活动等)。
[0061]
在图3的示例中,焊接训练程序300在框302之后继续到框304。在框304处,焊接训练程序300确定焊接会话是否应当开始和/或是否已经开始。在一些示例中,焊接会话可以包括一个或多个焊接操作。在一些示例中,焊接会话可以是焊接训练活动的一部分。在一些示例中,在框304处的确定可以包括确定是否已经选择开始焊接会话、焊接训练活动和/或焊接操作(例如,经由输入设备130、gtaw焊炬400、遥控器140、和/或操作者接口144)。在一些示例中,该确定可以包括确定框302是否已经令人满意地完成。在一些示例中,该确定可以包括确定gtaw焊炬400是否已经被激活(例如,经由遥控器140)。如果焊接训练程序300确定焊接会话不应当开始或尚未开始,则焊接训练程序300返回到框302。如果焊接训练程序300确定焊接会话应当开始或已经开始,则焊接训练程序300继续到框306。
[0062]
在图3的示例中,在框306处,焊接训练程序300跟踪附近的焊接环境中的物体(例如,gtaw焊炬400、焊条112和/或焊条附件500、(多个)工件110,焊接台102、操作者116等)。在一些示例中,焊接训练程序300可以使用从传感器104(和/或感测设备105)接收的传感器数据来执行跟踪。例如,传感器104可以捕获与它们各自的视野内的焊接环境关联的传感器数据,并且经由一个或多个数据信号将传感器数据传送到训练控制器200。焊接训练程序300可以处理传感器数据以检测、识别和/或跟踪物体。在一些示例中,焊接训练程序300可以使用标记113、焊炬标记413和/或附件标记513(和/或球体520/530)来检测、识别和/或跟踪物体。
[0063]
在图3的示例中,焊接训练程序300在框306之后继续到框307。在框307处,焊接训练程序300确定焊接环境中一个或多个物体(例如,相对于其他物体)的位置和/或取向。在一些示例中,焊接训练程序300可以经由传感器数据基于对物体的检测、识别和/或跟踪来确定位置和/或取向。例如,焊接训练程序300可以基于由传感器104捕获的数据来确定gtaw焊炬400、焊条112、(多个)工件110和/或操作者116相对于支撑平台120和/或gtaw训练系统100的其他元件的一个或多个位置和/或取向。
[0064]
在图3的示例中,焊接训练程序300在框307之后继续到框308。在框308处,焊接训练程序300确定gtaw训练系统100的一个或多个参数。在一些示例中,一个或多个参数可以包括一个或多个焊炬参数(例如,焊炬工作角度、焊炬行进角度、焊炬行进速度、焊炬对准、
电弧长度等)、训练参数(例如,端头到工件的距离、熔覆量、孔隙度、熔透等)、焊接参数(例如,电压、电流、气体流量/分配、电弧长度等)、焊条参数(例如,焊条工作角度、焊条行进角度、浸没率/频率/持续时间、摆动形状/幅度/频率等)、和/或其他相关参数。在一些示例中,焊接训练程序300可以基于以下各项来确定一个或多个参数:在框307处确定的位置和/或取向;在框306处经由来自传感器104的数据对物体的检测、识别和/或跟踪;从焊接型电力供应器108的检测器150接收的数据;从接线盒600的一个或多个传感器接收的数据(在下文进一步讨论);在框302处执行的设置和/或校准;和/或其他相关信息。
[0065]
在图3的示例中,焊接训练程序300在框308之后继续到框310。在框310处,焊接训练程序300确定焊接会话是否已经结束或应当结束。在一些示例中,该确定可以包括确定是否存在对结束焊接会话和/或焊接操作的选择(例如,经由输入设备130、遥控器140和/或操作者接口144)。在一些示例中,该确定可以包括确定gtaw焊炬400是否已经被停用(例如,经由遥控器140)。如果焊接训练程序300确定焊接会话尚未结束或不应当结束,则焊接训练程序300返回到框306。如果焊接训练程序300确定焊接会话已经结束或应当结束,则焊接训练程序300继续到框312。
[0066]
在图3的示例中,焊接训练程序300在框312处确定一个或多个训练结果。在一些示例中,可以基于框312处的参数(和/或框306和307的跟踪数据和/或位置/取向数据)来确定训练结果。在一些示例中,训练结果208可以包括一个或多个评分、等级、评级、参数集合、焊接会话(和/或焊接操作、训练活动等)的总结、用户(和/或操作者116、参与者等)信息、和/或与焊接会话(和/或(多个)焊接操作、训练活动等)有关的其他焊接训练反馈。在一些示例中,训练结果可以包括随时间同步的两个或更多个参数。在一些示例中,评分、等级和/或评级可以至少部分地基于这些参数与来自先前焊接会话(和/或(多个)焊接操作、训练活动等)的一个或多个参数的比较。在一些示例中,先前的焊接会话(和/或(多个)焊接操作、训练活动等)和/或相关联的参数可以存储在存储器206中。在一些示例中,训练控制器200可以将训练结果和/或参数与操作者116的身份相关联,诸如经由与操作者116相关联的唯一编号、操作者116的名称、和/或操作者116的其他标识信息。
[0067]
在框312处,焊接训练程序300另外输出训练结果208。在一些示例中,输出训练结果可以包括输出到显示屏129和/或gtaw训练系统100的其他输出机构。尽管被示出为在框310处的焊接会话结束之后执行,但在一些示例中,框312可以在焊接会话结束之前执行。例如,焊接训练程序300可以在焊接会话期间连续地实时确定和/或输出训练结果208,以便实现实况流式传输。在图3的示例中,焊接训练程序300在框312之后结束。
[0068]
图6是示出图1的接线盒600的更详细部件和连接的框图。在图6的示例中,接线盒600包括输入设备602、输出设备604、盒传感器606、控制开关608和盒控制电路系统610。如图所示,输入设备602a电连接至训练控制器200,而输入设备602b和输出设备604d电连接至焊接型电力供应器108,并且输入设备602c流体连接至焊接型电力供应器108(例如,用于传送保护气体)。如图6中接线盒600的另一侧所描绘的,输出设备604a和输出设备604b电连接至gtaw焊炬400,而输出设备604c流体连接至gtaw焊炬400,并且输入设备602d电连接至遥控器140。在接线盒600内,在图6的示例中,输入设备602a和输出设备604a都电连接至盒控制电路系统610。输入设备602d也被描绘为电连接至盒控制电路系统610。如图所示,输入设备602b和输出设备604b经由电力线612彼此电连接。同样,输入设备602c被示出为经由气体
管线614流体连接至输出设备604c。
[0069]
在图6的示例中,输入设备602d通过开关608选择性地连接至输出设备604d。在一些示例中,开关608可以包括一个或多个开关、继电器、晶体管和/或其他可控电路元件。如图所示,开关608与盒控制电路系统610电连接。在一些示例中,开关608可以响应于从盒控制电路系统610接收到的一个或多个信号来将输入设备602d和输出设备604d联接或解除联接。例如,盒控制电路系统610可以确定gtaw训练系统100处于实况电弧模式,并且向开关608发送指示闭合命令的一个或多个信号。作为响应,开关608可以闭合,从而将输入设备602d和输出设备604d联接在一起,从而允许来自遥控器140的信号从输入设备602d传递到输出设备604d,然后传递到焊接型电力供应器108。结果,焊接型电力供应器108可以从遥控器140接收一个或多个信号,所述信号用于命令将焊接型功率和/或气体递送到gtaw焊炬400(例如,经由输入设备602b、输出设备604b、输入设备602c和/或输出设备604c)。作为另一示例,盒控制电路系统610可以确定gtaw训练系统100处于模拟模式,并且向开关608发送指示断开命令的一个或多个信号。作为响应,开关608可以断开,从而使输入设备602d和输出设备604d解除联接。结果,来自遥控器140的信号可能不会从输入设备602d传送到输出设备604d和/或传送到焊接型电力供应器108。结果,焊接型电力供应器108可能没有从遥控器140接收用于命令将焊接型功率和/或气体递送到gtaw焊炬400的任何信号,并因此作为响应,绝不向gtaw焊炬400传送功率或气体。
[0070]
在一些示例中,输入设备602和/或输出设备604可以包括导电的物理端口(例如,公插头或母插座)。例如,输入设备602a可以是被配置为与可连接至训练控制器200(和/或焊接台102)的信号缆线电耦接的信号连接端口。同样,输出设备604a可以是被配置为与可连接至gtaw焊炬400的信号缆线电耦接的信号连接端口。作为另一示例,输出设备604d可以是被配置为与可连接至焊接型电力供应器108的信号缆线电耦接的信号连接端口。同样,输入设备602d可以是被配置为与可连接至遥控器140(和/或遥控接收器/收发器)的信号缆线电耦接的信号连接端口。
[0071]
在一些示例中,输入设备602a和/或输入设备602d可以包括被配置用于无线通信的输入通信电路系统(例如,一个或多个接收器、收发器和/或天线),而不是物理端口。在一些示例中,输出设备604a和/或输出设备604d可以包括被配置用于无线通信的输出通信电路系统(例如,一个或多个发射器、收发器和/或天线),而不是物理端口。在这样的示例中,通信电路系统可以被配置为与训练控制器200、焊接型电力供应器108、gtaw焊炬400和/或遥控器140(和/或训练控制器200、焊接型电力供应器108、gtaw焊炬400和/或遥控器140的对应的互配通信电路系统)进行无线通信。
[0072]
在一些示例中,输入设备602b可以包括被配置为与可连接至焊接型电力供应器108的电力缆线电耦接的导电物理电力连接端口(例如,公插头或母插座)。在一些示例中,输出设备604b可以包括被配置为与可连接至gtaw焊炬400的电力缆线电耦接的导电物理电力连接端口(例如,公插头或母插座)。在一些示例中,输入设备602b和/或输出设备604b可以被配置为处理比输入设备602a、输入设备602d、输出设备604a和/或输出设备604d更高的电压、电流和/或功率。
[0073]
在一些示例中,输入设备602c可以包括被配置为与可与焊接型电力供应器108的气体供应器142连接的气体缆线联接的物理气体连接端口(公或母端口)。在一些示例中,输
出设备604c可以包括被配置为与可与gtaw焊炬400连接的气体缆线联接的物理气体连接端口(公或母端口)。在一些示例中,可以省去输入设备602c和/或输出设备604c,和/或可以代替地在接线盒600的外部输送气体。尽管在图6的示例中被描绘为分开的输入设备602,但在一些示例中,输出设备604d、输入设备602b和/或输入设备602c可以被组合到单个设备中,和/或被配置为连接至单条缆线(例如,美国或欧洲的dinse或tweco式缆线)。同样,在一些示例中,输出设备604b和/或输出设备604c可以被组合到单个设备中,和/或被配置为连接至单条缆线(例如,美国或欧洲的dinse或tweco式缆线)。
[0074]
在图6的示例中,电力线612将输入设备602b电耦接至输出设备604b。在一些示例中,电力线612可以被配置为处理由焊接型电力供应器108输出的高电压和/或电流焊接型功率,以供gtaw焊炬400进行电弧焊。如图所示,气体管线614将输入设备602c和输出设备604c流体地联接。在图6的示例中,接线盒600包括与电力线612电连接的电压传感器606a和电流传感器606b,以及与气体管线614流体连通的气体流量传感器606c。在一些示例中,气体流量传感器606c可以被配置为感测、检测和/或测量通过气体管线614的气体流量。在一些示例中,电流传感器606b可以被配置为感测、检测和/或测量通过电力线612的电流。
[0075]
在一些示例中,电压传感器606a可以被配置为感测、检测和/或测量电力线612上的电压。在图6的示例中,电压传感器606a电连接至电力线612和电接地点616。因此,在一些示例中,电压传感器606a可以感测、检测和/或测量电力线612与电接地点616之间的电压差。在一些示例中,(例如,用于夹具114的)第二(夹具)电力线可以被布线通过接线盒600,并且电压传感器606可以替代地感测、检测和/或测量gtaw焊炬电力线612与夹具电力线之间的电压差。
[0076]
在图6的示例中,盒传感器606与盒控制电路系统610电连接。在一些示例中,盒控制电路系统610可以从盒传感器606接收指示它们的检测和/或测量值的一个或多个信号。在一些示例中,盒控制电路系统610可以向盒传感器606发送一个或多个控制信号以控制它们的操作。在一些示例中,盒控制电路系统610可以经由输入设备602a将盒传感器606的检测和/或测量值传送至训练控制器200。
[0077]
在图6的示例中,盒控制电路系统610还与输入设备602a、输出设备604a和输入设备602d电连接。在一些示例中,输入设备602a和输出设备604a可以既充当输入设备又充当输出设备,在这种情况下它们可以作为管道,用于从盒控制电路系统610(例如,到训练控制器200和/或gtaw焊炬400)的输出信号和(例如,从训练控制器200和/或gtaw焊炬400)到盒控制电路系统610的信号的输入信号两者。例如,盒控制电路系统610可以将经由输入设备602d从遥控器140接收的控制信号通过输入设备602a传送到训练控制器200(例如,使得训练控制器200可以检测到激活信号等)。因为盒控制电路系统610与输入设备602d电连接,所以无论gtaw训练系统100是处于实况电弧模式还是模拟模式(和/或无论开关608的对应状态如何),盒控制电路系统610都能够从遥控器140接收控制信号。因此,输入设备602a可以既充当输入设备又充当输出设备,在这种情况下它可以充当用于来自训练控制器200的输入信号和到训练控制器200的输出信号两者的导管。作为另一示例,盒控制电路系统610可以经由输出设备604a将模式状态(例如,实况电弧或模拟)传送到gtaw焊炬400,使得gtaw焊炬400可以经由焊炬输出418提供相应的指示。此外,gtaw焊炬400可以经由输出设备604a向盒控制电路系统610发送一个或多个控制信号,所述控制信号指示经由焊炬输入416进行的
某个操作者选择(例如,实况电弧模式或模拟模式)。因此,输出设备604a可以既充当输入设备又充当输出设备,在这种情况下它可以充当用于来自gtaw焊炬400的输入信号和到gtaw焊炬400的输出信号两者的导管。
[0078]
在图6的示例中,盒控制电路系统610包括盒处理电路系统620和盒存储器电路系统622。在一些示例中,盒处理电路系统620可以包括一个或多个处理器。在一些示例中,盒存储器电路系统622可以存储机器可读(和/或处理器可执行)指令。在一些示例中,盒控制电路系统610(和/或盒存储器电路系统622和/或盒处理电路系统624)可以包括分立和/或模拟电路系统。
[0079]
图7示出了图示示例盒控制方法700的流程图。如图所示,盒控制方法700图示了盒控制电路系统610的操作。在一些示例中,盒控制方法700的一部分或全部可以用存储在盒存储器电路系统622中的和/或由接线盒600的盒处理电路系统620执行的机器可读指令来实施。在一些示例中,盒控制方法700的一部分或全部可以在模拟和/或分立电路系统中实施。
[0080]
在图7的示例中,盒控制方法700开始于框702,其中,盒控制电路系统610经由输出设备604a接收来自gtaw焊炬400的输入。在一些示例中,输入可以是响应于经由焊炬输入416接收到的输入而从gtaw焊炬400发送的一个或多个信号。例如,一个货多个焊炬输入416可以用于命令特定模式(例如,实况电弧模式或模拟模式)。盒控制电路系统610可以处理输入和/或经由输入设备602a转发到训练控制器200。在框702之后,方法700继续到框704,在框704,盒控制电路系统610确定gtaw训练系统100的模式(例如,实况电弧或模拟)。在一些示例中,可以基于经由输入设备602a从训练控制器200接收到的一个或多个信号来做出确定。例如,训练控制器200可以基于来自gtaw焊炬400的输入来改变模式,和/或经由输入设备602a将指示该模式的一个或多个信号发送至盒控制电路系统610。可替代地,尽管存在来自gtaw焊炬400的输入,训练控制器200仍可以发送一个或多个指示模式未改变的信号(例如,在gtaw训练系统100不再处于设置/校准阶段或其他适当阶段的情况下)。
[0081]
在图7的示例中,方法700在框704之后继续到框706。在框706处,方法700确定模式是否为实况电弧模式。如果gtaw训练系统100处于实况电弧模式,则方法继续至框708,在框708,盒控制电路系统610发送一个或多个控制信号以闭合开关608。闭合开关608将输入设备602d联接至输出设备604d,并使焊接型电力供应器108能够从遥控器140接收信号。如果gtaw训练系统100不处于实况电弧模式,则该方法继续到框710,在框710,盒控制电路系统610发送一个或多个控制信号以断开开关608,从而将输入设备602d与输出设备604d解除联接,并禁止焊接型电力供应器108从遥控器140接收信号。尽管框706被描绘为确定gtaw训练系统100是否处于实况电弧模式,但在一些示例中,框706可以替代地或另外地包括确定gtaw训练系统100是否处于模拟模式或其他模式。在框708和/或710之后,该方法继续到框711。
[0082]
在图7的示例中,在框711处,方法700处理和/或分析从遥控器140接收的一个或多个控制信号(例如,经由输入设备602d),和/或将一个或多个控制信号发送至训练控制器200。如图所示,控制信号被发送到训练控制器200,而与是否执行框708或710无关。因此,无论gtaw训练系统100处于实况电弧模式、模拟模式还是某个其他模式(和/或开关608是断开还是闭合),训练控制器200的焊接训练程序300都可以使用(多个)遥控信号。在框711之后,
方法700继续到框712。
[0083]
在图7的示例中,方法700在框712处处理和/或分析从盒传感器606接收的数据,和/或将盒传感器数据发送到训练控制器200。在一些示例中,训练控制器200可以使用盒传感器数据来确定一个或多个参数(例如,在图3的框308处)和/或训练结果(例如,在图3的框312处)。如图所示,方法700在框712之后继续到框714。在框714处,方法700经由输出设备604a将一个或多个控制信号发送到gtaw焊炬400,以控制焊炬标记413、焊炬输出418和/或反馈机构420。例如,盒控制电路系统610可以控制一个或多个焊炬标记413(和/或多组焊炬标记413)的激活和/或停用以便于由gtaw训练系统100进行检测和/或跟踪。在一些示例中,盒控制电路系统610可以使用从训练控制器200接收的一个或多个信号来确定如何控制焊炬标记413。例如,训练控制器200可以向盒控制电路系统610提供指示由传感器104和/或跟踪操作捕获的数据的一个或多个信号,并且盒控制电路系统610可以基于该一个或多个信号来控制焊炬标记413。作为另一示例,盒控制电路系统610可以激活和/或停用一个或多个焊炬输出418以指示gtaw训练系统100的模式和/或gtaw训练系统100是否处于其中模式可以改变的状态。作为又一示例,盒控制电路系统610可以诸如响应于由训练控制器200传送的一个或多个参数和/或训练结果向反馈机构420发送指示激活/停用(和/或以某种水平操作)的命令的一个或多个信号。尽管方法700被描绘为在框714之后结束,但在一些示例中,方法700可以在结束之后在框702处重新开始。
[0084]
本公开描述了一种gtaw训练系统100,其使用焊炬标记413、具有附件标记513的焊条附件500、以及接线盒600来促进在钨极气体保护电弧焊系统的独特情况下进行训练。鉴于行业中焊接专业知识的匮乏以及gtaw焊接的独特性,像所公开的gtaw训练系统100这样的训练系统起着重要的作用。此外,gtaw训练系统可以在实况电弧模式和模拟模式下操作的能力意味着人们可以在进行真实实况焊接之前在模拟环境中磨练自己的技能,并针对这两种模式获得有价值的反馈。
[0085]
可以用硬件、软件或硬件和软件的组合来实现本方法和/或系统。可以以集中方式在至少一个计算系统中实现本方法和/或系统,或者以不同的要素遍布在若干互连计算系统或云系统上的分布式方式实现本方法和/或系统。适于执行本文所描述的方法的任何种类的计算系统或其他装置都是适合的。硬件和软件的典型组合可以是具有程序或其他代码的通用计算系统,该程序或其他代码当被加载和执行时控制该计算系统以使得该计算系统执行本文所描述的方法。另一典型实施方式可以包括专用集成电路或芯片。一些实施方式可以包括非临时机器可读(例如,计算机可读)介质(例如,闪存驱动器、光盘、磁存储盘等),该非临时机器可读介质上存储有可由机器执行的一个或多个代码行,从而使机器执行如本文所描述的过程。
[0086]
尽管已经参考某些实施方式描述了本方法和/或系统,但是本领域技术人员将理解,在不脱离本方法和/或系统的范围的情况下,可以进行各种改变并且可以用等效物替换。另外,在不脱离本公开的范围的情况下,可以做出许多修改以使特定情况或材料适应本公开的教示。因此,本方法和/或系统不旨在局限于所公开的特定实施方式,而是本方法和/或系统将包括落在所附权利要求的范围内的所有实施方式。
[0087]
如本文所使用的,“和/或”是指清单中由“和/或”连接的项中的任何一项或多项。例如,“x和/或y”是指三元素集{(x),(y),(x,y)}中的任何元素。换言之,“x和/或y”是指“x
和y中的一个或两个”。作为另一示例,“x、y和/或z”是指七元素集{(x),(y),(z),(x,y),(x,z),(y,z),(x,y,z)}中的任何元素。换句话说,“x、y和/或z”是指“x、y和z中的一个或多个”。
[0088]
如本文所使用的,术语“例如”和“比如”引出一个或多个非限制性示例、实例或说明的清单。
[0089]
如本文所使用的,术语“联接”、“联接至”和“与
……
联接”分别是指结构连接和/或电连接、不管是附接、附着、连接、结合、紧固、联系和/或以其他方式固定。如本文所使用的,术语“附接”是指附着、联接、连接、结合、紧固、联系和/或以其他方式固定。如本文所使用的,术语“连接”是指进行附接、附着、联接、结合、紧固、联系和/或以其他方式固定。
[0090]
如本文所使用的,术语“电路”和“电路系统”是指物理电子部件(即,硬件)以及可以配置硬件、由硬件执行、和/或以其他方式与硬件相关联的任何软件和/或固件(“代码”)。如本文所使用的,例如,特定的处理器和存储器在执行第一一行或多行代码时可以构成第一“电路”,并且在执行第二一行或多行代码时可以构成第二“电路”。如本文所使用的,当电路系统包括执行某一功能所必需的硬件和/或代码(如果有必要)时,电路系统“可操作”和/或“被配置”用于执行该功能,而不管该功能的执行是被禁用还是被启用(例如,通过用户可配置的设置,出厂调节等)。
[0091]
如本文所使用的,控制电路(和/或控制电路系统)可以包括数字电路系统和/或模拟电路系统、分立电路系统和/或集成电路系统、微处理器、dsp等,位于一个或多个板上的形成控制器的一部分或全部和/或用于控制焊接过程的软件、硬件和/或固件,和/或诸如电源或送丝器等设备。
[0092]
如本文所使用的,术语“处理器”是指处理设备、装置、程序、电路、部件、系统和子系统,无论是以硬件、有形体现的软件或硬件和软件两者来实施、以及无论其是否是可编程的。如本文使用的术语“处理器”包括但不限于一个或多个计算设备、硬连线电路、信号修改设备和系统、用于控制系统的设备和机器、中央处理单元、可编程设备和系统、现场可编程门阵列、专用集成电路、芯片上系统、包括分立元件和/或电路的系统、状态机、虚拟机、数据处理器、处理设施、以及前述任一项的组合。处理器可以例如是任何类型的通用微处理器或微控制器、数字信号处理(dsp)处理器、专用集成电路(asic)、图形处理单元(gpu)、具有高级risc机器(arm)核的精简指令集计算机(risc)处理器等等。处理器可以耦接到存储器设备和/或与存储器设备整合在一起。
[0093]
如本文所使用的,术语“存储器”和/或“存储器设备”是指用于存储信息以供处理器和/或其他数字设备使用的计算机硬件或电路系统。存储器和/或存储器设备可以是任何合适类型的计算机存储器或任何其他类型的电子存储介质,例如只读存储器(rom)、随机存取存储器(ram)、高速缓存存储器、光盘只读存储器(cdrom)、电光存储器、磁光存储器、可编程只读存储器(prom)、可擦除可编程只读存储器(eprom)、电可擦除可编程只读存储器(eeprom)、计算机可读介质等。存储器可以包括例如非暂时存储器、非暂时处理器可读介质、非暂时计算机可读介质、非易失性存储器、动态ram(dram)、易失性存储器、铁电ram(fram)、先进先出(fifo)存储器、后进先出(lifo)存储器、栈存储器、非易失性ram(nvram)、静态ram(sram)、高速缓存、换存器、半导体存储器、磁存储器、光存储器、闪存、闪存卡、紧凑式闪存卡、存储器卡、安全数字存储器卡、微卡、小型卡、扩展卡、智能卡、记忆棒、多媒体卡、图片卡、闪存设备、用户识别模块(sim)卡、硬件驱动器(hdd)、固态驱动器(ssd)等。存储器
可以被配置为存储代码、指令、应用、软件、固件和/或数据,并且可以设置在处理器外部、在处理器内部或者在处理器外部和内部都设置。
[0094]
为了方便起见,在整个本说明书中使用术语“功率”,但是其还包括相关的量度,诸如能量、电流、电压和焓。例如,控制“功率”可以涉及控制电压、电流、能量和/或焓,和/或基于“功率”进行控制可以涉及基于电压、电流、能量和/或焓进行控制。
[0095]
如本文所使用的,焊接型功率是指适用于以下各项的功率:焊接、熔覆、钎焊、等离子切割、感应加热、碳弧切割和/或热丝焊/预加热(包括激光焊和激光熔覆)、碳弧切割或熔刮、和/或电阻式预加热。
[0096]
如本文所使用的,焊接型电力供应器和/或电源是指在向其施加功率时能够向焊接、熔覆、钎焊、等离子切割、感应加热、激光加工(包括激光焊、激光复合加工和激光熔覆)、碳弧切割或熔刮、和/或电阻式预加热提供功率的任何设备,包括但不限于变压器-整流器、逆变器、转换器、谐振电力供应器、准谐振电力供应器、开关模式电力供应器等、以及控制电路系统和与其相关联的其他辅助电路系统。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1