一种数字化低飞溅气保焊机的制作方法
1.本实用新型涉及气体保护焊机技术领域,特别是涉及一种数字化低飞溅气保焊机。
背景技术:
2.目前市场上的气体保护焊机(下称“气保焊机”)的过渡方式以短路过渡为主,“过渡”的主要特征是短路时间和短路频率。短路过渡是在细焊丝、低电压和小电流情况下发生的,影响短路过渡稳定性的因素主要是电压,电压一般约为18~21v时,短路时间较长,过程较稳定。所以焊接电流和焊丝直径也即焊丝的电流密度对短路过渡过程的影响也很大。
3.由于气保焊机在焊接时,焊丝在爆断的过程中会产生很大的飞溅,既影响了焊缝的成型,又需要二次清理和打磨处理焊接后的飞溅物,增加了二次加工成本。虽然市场上也有一些降低焊接飞溅的气保焊机技术,但都由于设计的电路极为复杂,而导致成本居高不下,只有少数用户单位才有能力购买,不利于大力推广。
4.随着用工成本不断的增加,对气保焊机焊接飞溅的控制要求越来越高,如何用低成本方案降低气保焊机的飞溅成了各焊机厂家需要解决的技术难题。
技术实现要素:
5.基于此,有必要针对传统气保焊机存在的飞溅大、设计电路复杂等问题,提供一种数字化低飞溅气保焊机。
6.本实用新型所述的一种数字化低飞溅气保焊机,包括主电路部分和控制部分,所述主电路部分包括逆变主回路105和斩波电路106,所述控制部分包括主控制板100、控制面板101、机器人通讯板102、主驱动板103和辅助电源电路107;所述主控制100板分别与所述控制面板101、主驱动板103、辅助电源电路107、逆变主回路105和机器人通讯板102连接,所述逆变主回路105的输入端通过电源开关与三相交流电连接,所述逆变主回路105的正极输出端与所述斩波电路106的输入端连接,所述主驱动板103的输出端分别与所述逆变主回路105、所述斩波电路106连接。
7.在其中一个实施例中,所述辅助电源电路107的输入端与所述emc吸收板109的一输出端连接,所述辅助电源电路107的输出端分别与所述主控制板100、所述主驱动板103的输入端连接。
8.在其中一个实施例中,所述逆变主回路包括整流滤波电路、igbt逆变电路以及二次整流电路;
9.其中,所述整流滤波电路包括emc吸收板109、三相整流桥d1和电容(c1~c4);所述emc吸收板109的输入端与三相交流电连接,所述emc吸收板109的另一输出端与三相整流桥d1的输入端连接,所述电容(c1~c4)并联后接于所述三相整流桥d1的正负极;
10.其中,所述igbt逆变电路包括igbt(t1~t4)和第一吸收电路,所述igbt t1的e极与igbt t2的c极串联后与所述整流滤波电路的输出端连接,所述igbt t3的e极与igbt t4
的c极串联后与整流滤波电路的输出端连接,所述第一吸收电路包括电阻(rx1~rx4)和电容(cx1~cx4);
11.其中,所述二次整流电路包括主变压器b1、第二吸收电路和整流管(d2,d3),所述整流管d2的阴极与所述整流管d3的阴极连接;所述变压器b1原级的一端接于电容cx3和电容cx4的中间节点,另一端通过电容c6与电流互感器ifb连接;变压器b1次级的一端与整流管d2的阳极连接,另一端与整流管d3的阳极连接;所述第二吸收电路包括电阻(rx5~rx12)、电容(cx5~cx8)。
12.在其中一个实施例中,所述斩波电路106包括斩波开关电路、续流电路和斩波吸收板104;
13.其中,所述斩波开关电路包括斩波开关igbt t5;所述续流电路包括续流电阻r2,所述续流电阻r2并接于所述斩波开关igbt t5的c极、e极;所述斩波吸收板104与所述续流电阻r2并联。
14.在其中一个实施例中,所述主控制板100包括送丝机和气阀控制模块、电流和电压反馈模块、单片机以及机器人控制模块;
15.所述送丝机和气阀控制模块通过所述主控制板100的插座j3与外接送丝机构连接,所述电流和电压反馈模块通过所述主控制板100的插座j8与外接霍尔传感器连接;所述单片机包括主单片机和斩波单片机,所述主单片机输出的第一pwm信号通过所述主控制板100的插座j13输出到所述主驱动板103;所述斩波单片机输出的第二pwm信号通过所述主控制板100的插座j17输出到所述主驱动板103;所述机器人控制模块包括开关量控制单元和模拟量控制单元,所述开关量控制单元通过所述主控制板100的插座j10与所述机器人通讯板102连接,所述模拟量控制单元通过所述主控制板(100)的插座j15与所述机器人通讯板102连接。
16.在其中一个实施例中,所述主控板100还包括保护功能模块,所述保护功能模块包括温度保护电路、过流保护电路,以及过压和欠压保护电路;所述温度保护电路的一路通过所述主控制板100的插座j14外接温度开关rt2,所述温度保护电路的另一路通过所述主控制板100的插座j15外接温度开关(rt1);所述过流保护电路通过所述主控制板(100)的插座(j12)外接所述逆变主回路105的变压器b1原边的电流互感器ifb;所述过压和欠压保护电路通过所述主控制板100的插座j6与所述整流滤波电路的三相整流桥d1的输出端连接。
17.在其中一个实施例中,所述主驱动板103的输出端分别连接到所述逆变主回路105的igbt t1的g1极和e1极、igbt t2的g2极和e2极、igbt t3的g3极和e3极、igbt t4的g4极和e4极。
18.在其中一个实施例中,所述主驱动板103的输出端与所述斩波电路106的斩波开关igbt t5连接。
19.在其中一个实施例中,所述机器人通讯板102外接机器人控制柜108。
20.在其中一个实施例中,所述主控制板分别外接霍尔传感器和所述主电路部分的“+,
‑”
极。
21.本实用新型所述气保焊机,采用全数字控制,操作面板简洁明了,焊接性能和飞溅的控制都达到了很好的效果,并配有与机器人通讯接口,方便实现机器人自动化生产。
附图说明
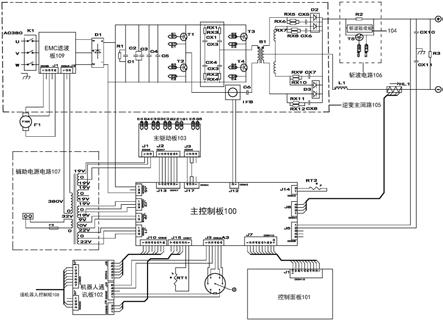
22.图1为一个实施例中气保焊机的电路图。
具体实施方式
23.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。
24.可以理解,本申请所使用的术语“第一”、“第二”等可在本文中用于描述各种元件,但这些元件不受这些术语限制。这些术语仅用于将第一个元件与另一个元件区分。举例来说,在不脱离本申请的范围的情况下,可以将第一二极管称为第二二极管,且类似地,可将第二二极管称为第一二极管。
25.本实用新型所述气保焊机,包括主电路部分和控制部分。其中,主电路部分包括逆变主回路105和斩波电路106,控制部分包括主控制板100、控制面板101、主驱动板103、和辅助电源电路107和机器人通讯板102。主控制板100分别与控制面板101、主驱动板103、辅助电源电路107、逆变主回路105和机器人通讯板102连接,逆变主回路105的输入端通过电源开关与三相交流电连接,逆变主回路105的正极输出端与斩波电路106的输入端连接,主驱动板103的输出端分别与逆变主回路105连接、所述斩波电路106,所述辅助电源电路107的输入端与所述emc吸收板109的一输出端连接,所述辅助电源电路107分别与所述主控制板100、所述主驱动板103连接,以下将通过具体实施例进行说明。
26.图1为一个实施例中气保焊机的电路图,如图所示。一种数字化低飞溅气保焊机包括主电路部分和控制部分。其中,控制部分包括主控制板100、控制面板101、机器人通讯板102、主驱动板103以及辅助电源电路107;主电路部分包括逆变主回路105和斩波电路106。
27.在一个实施例中,控制面板101的插座j1与主控制板100的插座j7连接。控制面板101包括人工操作界面和显示界面。人工操作界面由按键和调节编码器组成;显示界面由指示灯和数码管组成。
28.焊机的低飞溅、焊接方式、焊材类型、焊丝的直径、控制方式以及二级菜单的进入设置等,都可以通过上述的人工操作界面来完成。此外,焊机的功能指示,例如电流电压显示,可以由上述的显示界面来显示。
29.在一个实施例中,主控制板100包括送丝机和气阀控制模块、电流和电压反馈模块、单片机、机器人控制模块以及保护功能模块。以下对将这些模块进行说明。
30.送丝机和气阀控制模块通过主控制板100的插座j3与外接送丝机构连接,送丝机构包括送丝电机、气阀、手工焊接时的电流电压的调节和焊枪开关等。
31.电流和电压反馈模块通过主控制板100的插座j8与外接霍尔传感器连接。其中,电流反馈信号由霍尔传感器采集;电压反馈信号由主控制板100的插座j5外接输出+,
‑
极采集。采集到的电流和电压反馈信号分别经过逻辑运算后输入到单片机,由单片机程序控制焊接时的熔滴过渡和电弧特性。
32.单片机包括主单片机和斩波单片机,主单片机输出的4路第一pwm(脉冲宽度调制,以下简称“pwm”)信号通过主控制板100的插座j13输出到主驱动板103的插座j2。斩波单片机输出的1路第二pwm信号通过主控制板100的插座j17输出到主驱动板103的插座j3。
33.机器人控制模块包括开关量控制单元和模拟量控制单元。开关量控制单元通过主控制板100的插座j10与机器人通讯板102的插座j5连接;模拟量控制单元通过主控制板100的插座j15与机器人通讯板102的插座j3连接,模拟量控制单元用于控制焊接电流和电压。
34.保护功能模块包括温度保护电路、过流保护电路,以及过压和欠压保护电路。其中,温度保护电路包括两路温度保护:一路通过主控制板100的插座j14外接温度开关rt2,温度开关rt2用于检测斩波电路106的斩波开关igbt(绝缘栅双极型晶体管,以下简称|“igbt”)t5的工作温度,当超过预设温度时,立即关断第二pwm信号输出,电路进入保护状态;另一路通过主控制板100的插座j15外接温度开关rt1,温度开关rt1用于检测逆变主回路105的igbt管(t1~t4)的工作温度,当超过预设温度时,立即关断第一pwm信号输出,电路进入保护状态。
35.其中,过流保护电路通过主控制板100的插座j12外接逆变主回路105的变压器b1原边的电流互感器ifb,电流互感器ifb用于检测逆变主回路105的原边电流,当原边电流变化时,通过单片机自动调整主第一pwm信号补偿;如果原边电流超过预设峰值时,证明逆变主回路105有异常,需立即关断第一pwm信号输出,电流进入保护状态。
36.其中,过压和欠压保护电路通过主控制板100的插座j6与整流滤波电路的三相整流桥d1的输出端连接。过压和欠压保护电路检测到经过三相整流桥d1整流之后的直流母线电压和波形,当直流母线电压和波形变化时,通过单片机自动调整第一pwm信号补偿;如果直流母线电压超过预设值时,证明逆变主回路105有异常,需立即关断第一pwm信号输出,电路进入保护状态。
37.在一个实施例中,辅助电源电路107的输入端与emc吸收板109的插座j2连接,辅助电源电路107将380v的交流电通过变压器降压输出19v、9v和22v电压。辅助电源电路107与主驱动板103的插座j1连接,为主驱动板103提供双19v电源。
38.辅助电源电路107分别与主控制板100的插座j1、插座j2和插座j9连接。辅助电源电路107通过主控制板100的插座j2输入电源,为主控制板100的控制部分提供双19v电源;辅助电源电路107通过主控制板100的插座j1输入电源,为送丝机和气阀控制的提供双22v电源;辅助电源电路107通过主控制板100的插座j9输入电源,为过压和欠压保护电路提供9v电源。
39.在一个实施例中,主驱动板103的输出端分别连接到逆变主回路105的igbt t1的g1极和e1极、igbt t2的g2极和e2极、igbt t3的g3极和e3极、igbt t4的g4极和e4极、斩波开关igbt t5的g5极和e5极。
40.主单片机输出的4路的第一pwm信号通过主控制板100的插座j13输出,并通过主驱动板103的插座j2输入,经过主驱动板103的pwm信号推动、驱动变压器产生负压信号、光耦驱动隔离,分别输出到igbt t1的g1和e1、igbt t2的g2和e2、igbt t3的g3和e3、igbt t4的g4和e4控制igbt(t1~t4)来实现逆变功能。斩波单片机输出的1路第二pwm信号通过主控制板100的插座j17输出,并通过主驱动板103的插座j3输入,由主驱动板103输出到斩波开关igbt t5的g5和e5。
41.在一个实施例中,机器人通讯板102的插座j5与主控制板100的插座j10连接,机器人通讯板102的插座j4与主控制板100的插座j3连接,机器人通讯板插座j3与主控制板100的j15连接。机器人通讯板102的插座j1和插座j2均与外接机器人控制柜108连接。
42.其中,机器人控制柜108的4组输入开关量通过机器人通讯板102的插座j1输入,这4组输入开关量分别控制检丝、检气、起弧开关和退丝,这4组输入开关量通过机器人通讯板102的光耦隔离,并通过机器人通讯板102的插座j5连接到主控制板100的插座j10。机器人通讯板102的1组输出开关量通过其插座j1输出控制引弧成功信号。
43.其中,机器人通讯板102的2路模拟量控制电流和电压调节等功能,由机器人通讯板102的插座j2连接到机器人控制柜108,通过机器人通讯板102的光耦隔离,由机器人通讯板102的插座j3输出连接到主控制板100的插座j15,以实现控制焊接的电流和电压。由于本实用新型增设了机器人通讯板102,因此本实用新型可与工业机器人通讯,实现机器人自动化焊接。
44.在一个实施例中,逆变主回路105包括整流滤波电路、igbt逆变电路以及二次整流电路。
45.其中,整流滤波电路包括emc吸收板109、三相整流桥d1和电容(c1~c4)。emc吸收板109通过电源开关k与380v的三相交流电(u,v,w)连接,所述emc吸收板输出端与三相整流桥d1的输入端连接。电容(c1~c4)并联后接于三相整流桥d1的正负极。三相整流桥d1将输入的三相交流电整流,并经过电容(c1~c4)滤波成直流电源输出。
46.根据实际电路的需要,整流滤波电路还可以包括与电容c1并联的电阻r1,也还可以包括分别与电容(c1~c4)并联的电容c5。
47.其中,igbt逆变电路包括igbt(t1~t4)和第一吸收电路。igbt t1的e极与igbt t2的c极串联后与整流滤波电路的输出端连接。igbt t3的e极与igbt t4的c极串联后与整流滤波电路的输出端连接。
48.第一吸收电路包括电阻(rx1~rx4)和电容(cx1~cx4)。电阻rx1与电容cx1、电容cx2和电阻rx2串联后接于igbt t1的c极和igbt t2的e极;电阻rx3与电容cx3、电容cx4和电阻rx4串联后接于igbt t3的c极和igbt t4的e极。
49.其中,二次整流电路包括主变压器b1、第二吸收电路和整流管(d2,d3)。整流管d2的阴极与整流管d3的阴极连接;变压器b1原级的一端接于电容cx3和电容cx4的中间节点,另一端通过电容c6与电流互感器ifb连接;变压器b1次级的一端与整流管d2的阳极连接,另一端与整流管d3的阳极连接。经过二次整流电路整流后,电源的负极输出端通过电抗器l1输出,电源的正极输出端与斩波电路106的输入端连接。
50.由此可知,由电阻(rx1~rx4)、电容(cx1~cx4)组成对igbt(t1~t4)的第一吸收电路;由电阻(rx5~rx12)、电容(cx5~cx8)组成对整流管(d2,d3)的第二吸收电路。
51.在一个实施例中,斩波电路106包括斩波开关电路、续流电路和斩波吸收板104。斩波开关电路包括斩波开关igbt t5,由斩波驱动来控制斩波igbt t5的导通和截止。上述二次整流电路整流后的电源正极与斩波开关igbt t5的c极连接,经过斩波开关igbt t5的e极输出到焊机的正极接口。
52.其中,续流电路包括续流电阻r2,续流电阻r2并接于斩波开关igbt t5的c极、e极,当斩波开关igbt t5关断时,焊接电流经过续流电阻r2输出。
53.其中,斩波吸收板104用于吸收斩波开关igbt t5在开关时的尖峰电压。
54.在一个实施例中,斩波吸收板104包括二极管、电阻r和电容c。电容c的一端与二极管d的阴极连接,另一端与斩波开关igbt t5的e极连接,电阻r与电容c并联。当然斩波吸收
板104还可以是由其它电路组成,本实用新型不限于此。
55.由于本实用新型在主电路部分增设了斩波电路,避免了主电路过于复杂,简化了焊机内部结构,大大降低了生产成本,提高了生产效率;而且控制电路部分只采用了控制面板、主控制板、主驱动板、机器人通讯板等线路板,大大减少了线路板的数量。
56.以上所述实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
57.以上所述实施例仅表达了本实用新型的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对本实用新型专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本实用新型构思的前提下,还可以做出若干变形和改进,这些都属于本实用新型的保护范围。因此,本实用新型专利的保护范围应以所附权利要求为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1