一种用于服务器CPU自动安装的多功能组合装置的制作方法
一种用于服务器cpu自动安装的多功能组合装置
技术领域
[0001]
本实用新型属于工业机器人技术领域,具体涉及一种用于服务器cpu自动安装的多功能组合装置。
背景技术:
[0002]
目前在服务器的装配生产过程中,特别是cpu的安装,几乎完全采用人工操作或人工辅助机械的方式进行操作。在安装cpu时,需要人工将主板上cpu盖板打开,安装到固定卡槽里,并手动压紧,整个安装过程比较繁琐,并且人工操作容易发生cpu对位偏差,或碰歪cpu插座针脚等情况。
[0003]
随着生产自动化程度的提高,已经出现了一些自动安装cpu的设备。例如在2020年1月17日公开的发明专利申请cn110695918a中披露一种cpu自动组装装置,该装置主要用于主板测试时自动安装cpu,但是所安装的cpu需要提前用人工方式固定在装置的底部,不适用于流水线中cpu的装配。在2019年5月28日公开的发明专利申请cn109807802a中披露一种用于电脑组装的cpu安装机及其工作方法,该发明适用于电脑的装配过程,但是在安装cpu前,需要人工将主板和cpu放置到固定位置,需要人工观察cpu底座针脚状态,并且不适用于服务器上接口比较复杂的cpu安装,比如amd sp3/tr4接口的cpu在安装时需要拆装螺丝,该发明就不适用。
技术实现要素:
[0004]
本实用新型所要解决的技术问题是,针对现有技术的不足,提供一种用于服务器cpu自动安装的多功能组合装置。
[0005]
为解决上述技术问题,本实用新型所采用的技术方案是:用于服务器cpu自动安装的多功能组合装置,包括连接于第一机械手臂的第一末端执行器和连接于第二机械手臂的第二末端执行器,所述第一机械手臂、第二机械手臂、第一末端执行器和第二末端执行器均连接在同一控制系统中;第一末端执行器设置有立方体结构的第一安装座,所述第一安装座的侧面分别设置有cpu供给机构、视觉检测机构和拾取机构;第二末端执行器设置有长方体结构第二安装座,所述第二安装座两端分别设置有抓取机构和压紧机构。
[0006]
进一步的,所述的用于服务器cpu自动安装的多功能夹具还包括锁螺丝机构,所述锁螺丝机构包括自动螺丝刀、螺丝批头和锁螺丝支架,锁螺丝支架连接于第一安装座的侧面,自动螺丝刀安装在该锁螺丝支架上,自动螺丝刀的底部插接有螺丝批头。
[0007]
进一步的,所述cpu供给机构包括供料吸盘、吸盘安装框架、吸盘安装支架和供料支架,供料支架连接于第一安装座的侧面;吸盘安装框架为长方形结构,由两根垂直于供料支架的垂直安装杆和两根平行于供料支架的平行安装杆组成;吸盘安装支架通过其顶部设置的凸起安装槽安装到吸盘安装框架的垂直安装杆上;吸盘安装支架上镂空设置有长形安装槽,供料吸盘安装在该长形安装槽内。
[0008]
进一步的,所述视觉检测机构包括工业相机和视觉支架,视觉支架连接于第一安
装座的侧面,工业相机安装在该视觉支架上。
[0009]
进一步的,所述拾取机构包括拾取吸盘、定位块和拾取支架,拾取支架的一端连接于第一安装座的侧面,另一端设置有定位块和拾取吸盘。
[0010]
进一步的,所述抓取机构包括自动夹手和抓取支架,抓取支架连接于第二安装座一端的底部,自动夹手安装在该抓取支架上。
[0011]
进一步的,所述压紧机构包括压杆和压紧支架,压紧支架连接于第二安装座一端,压杆插装在该压紧支架上。
[0012]
进一步的,所述压杆的端头设置有u型凹槽。
[0013]
进一步的,所述供料吸盘为负压吸盘。
[0014]
进一步的,所述拾取吸盘为负压吸盘。
[0015]
与现有技术相比,本实用新型的有益效果如下:本实用新型充分利用装配流水线中工业机器人定位精度高、柔顺性好的特点,可以实现视觉观察、抓取、吸取、按压、拧螺丝等动作,实现服务器cpu的自动安装,几乎完全替代人工,减少人工成本,提高装配效率和装配精度。本实用新型的视觉检测机构可以准确识别目标物体位置,主板和cpu不在固定位置也能自动安装,也可以在安装cpu前自动检测cpu底座针脚状态。
附图说明
[0016]
下面结合附图对本实用新型做进一步的详细说明。
[0017]
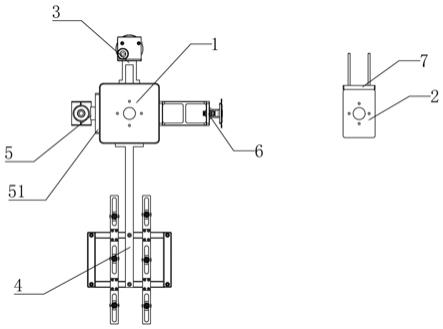
图1:本实用新型的俯视图。
[0018]
图2:本实用新型中第一末端执行器的立体图。
[0019]
图3:本实用新型中第二末端执行器的立体图。
[0020]
图4:本实用新型实施例1中主板cpu底座的立体图。
[0021]
图5:本实用新型实施例2中主板cpu底座的立体图。
[0022]
其中,1-第一安装座,2-第二安装座;3-视觉检测机构,31-视觉支架,32-工业相机;4-cpu供给机构,41-供料支架,42-垂直安装杆,43-平行安装杆,44-吸盘安装支架,45-凸起安装槽,46-长形安装槽,47-供料吸盘;5-锁螺丝机构,51-锁螺丝支架,52-自动螺丝刀,53-螺丝批头;6-拾取机构,61-拾取支架,62-拾取吸盘,63-定位块;7-压紧机构,71-压紧支架,72-压杆;8-抓取机构,81-抓取支架,82-自动夹手;91-螺丝,92-cpu盖板,93-cpu安装架,94-卡扣,95-透明保护盖,96-黑色保护盖;101-cpu压板,102-cpu保护盖,103-第一拉杆,104-第一卡扣,105-第二拉杆,106-第二卡扣,107-cpu安装槽。
具体实施方式
[0023]
为了更好地理解本实用新型,下面结合实施例进一步清楚阐述本实用新型的内容,但本实用新型的保护内容不仅仅局限于下面的实施例。在下文的描述中,给出了大量具体的细节以便提供对本实用新型更为彻底的理解。然而,对于本领域技术人员来说显而易见的是,本实用新型可以无需一个或多个这些细节而得以实施。
[0024]
实施例1:
[0025]
参照图1、图2、图3、图4,本实用新型所述的一种用于服务器cpu自动安装的多功能组合装置,包括连接于第一机械手臂的第一末端执行器和连接于第二机械手臂的第二末端
执行器,所述第一机械手臂、第二机械手臂、第一末端执行器和第二末端执行器均连接在同一控制系统中,所述第一末端执行器设置有立方体结构的第一安装座1,所述第一安装座1是空心结构,顶面用于连接机械手臂,未设置底面,侧面分别设置有cpu供给机构4、视觉检测机构3、锁螺丝机构5和拾取机构6;所述第二末端执行器设置有长方体结构第二安装座2,所述第二安装座2两端分别设置有抓取机构8和压紧机构7。
[0026]
锁螺丝机构5包括自动螺丝刀52、螺丝批头53和锁螺丝支架51,锁螺丝支架51连接于第一安装座1的侧面,自动螺丝刀52安装在该锁螺丝支架51上,自动螺丝刀52的底部插接有螺丝批头53;螺丝批头53规格与cpu盖板92上需要拆装的螺丝91相匹配。在本实施例中螺丝批头53为一梅花内六角型批头;自动螺丝刀52为一电动螺丝刀,当然,在具体实施过程中,也可选用气动螺丝刀。
[0027]
cpu供给机构4包括供料吸盘47、吸盘安装框架、吸盘安装支架44和供料支架41,供料支架41连接于第一安装座1的侧面;吸盘安装框架为长方形结构,由两根垂直于供料支架41的垂直安装杆42和两根平行于供料支架41的平行安装杆43组成;吸盘安装支架44通过其顶部设置的凸起安装槽45安装到吸盘安装框架的垂直安装杆42上;吸盘安装支架44上镂空设置有长形安装槽46,供料吸盘47安装在该长形安装槽46内。本实施例中设置两根吸盘安装支架44,每根吸盘安装支架44上设置三个供料吸盘47,可以调整吸盘安装支架44的位置和供料吸盘47的位置,确保相邻两个供料吸盘47之间的距离与料盘中cpu的摆放距离相匹配。
[0028]
视觉检测机构3包括工业相机32和视觉支架31,视觉支架31连接于第一安装座1的侧面,工业相机32安装在该视觉支架31上。本实施例中工业相机32采用500万像素镜头,镜头焦距25mm,通过网线与控制系统连接。
[0029]
拾取机构6包括拾取吸盘62、定位块63和拾取支架61,拾取支架61的一端连接于第一安装座1的侧面,另一端设置有定位块63和拾取吸盘62,定位块63可以在拾取机构6抽取cpu透明保护盖95或放置cpu时起定位和支撑作用。
[0030]
抓取机构8包括自动夹手82和抓取支架81,抓取支架81连接于第二安装座2一端的底部,自动夹手82安装在该抓取支架81上。在本实施例中,自动夹手82为一气动夹手,当然,在具体实施过程中,也可选用电动夹手。
[0031]
压紧机构7包括两根压杆72和压紧支架71,压紧支架71连接于第二安装座2一端,压杆72插装在该压紧支架71上,两根压杆72之间的距离与cpu安装架93的尺寸相匹配,在本实施例中两根压杆72的中心距设置为67mm。
[0032]
第一安装座1和第二安装座2的顶面中心位置均设置有安装孔,与机械手臂末端安装接口一致,第一安装座1顶面中心位置与第一机械手臂末端固定连接,第二安装座2顶面中心位置与第二机械手臂末端连接;第一机械手臂和第二机械手臂具备六个自由度。
[0033]
供料吸盘47和拾取吸盘62均为负压吸盘,其尾部通过气管连接抽气设备。
[0034]
图4为amd sp3/tr4接口cpu底座的立体图,下面结合图4,介绍工业机器人利用本实用新型,借助装配流水线上的辅助定位机构实现自动安装amd sp3/tr4接口cpu的过程。
[0035]
1、主板通过输送线运送到安装位置后,视觉检测机构3自动检测主板上的定位标识,确认cpu底座的位置和数量,确定需要安装的cpu数量。
[0036]
2、锁螺丝机构5拧开cpu盖板92上的三颗螺丝91,cpu盖板92会自动弹开;辅助定位
机构将cpu盖板92掀开到最大角度。
[0037]
3、抓取机构8上的自动夹手82夹紧透明保护盖95的外侧一端向上拉,cpu安装架93上的卡扣94会自动打开,cpu安装架93随着透明保护盖95一起抬起;辅助定位机构将cpu安装架93固定在垂直位置。
[0038]
4、抓取机构8抓取黑色保护盖96,并将黑色保护盖96丢弃到废料箱中。
[0039]
5、视觉检测机构3自动检测cpu底座针脚,确认其状态完好。
[0040]
6、辅助定位机构将cpu安装架93固定在一个较小的角度,拾取机构6上的拾取吸盘62吸住透明保护盖95,将透明保护盖95抽出后丢弃到废料箱中。
[0041]
7、cpu供给机构4上的供料吸盘47吸附料盘上的cpu到安装位置。
[0042]
8、视觉检测机构3自动检测cpu上的安装标识,确认待安装cpu的状态和位置。
[0043]
9、拾取机构6吸附cpu,将其插入cpu安装架93中。
[0044]
10、辅助定位机构闭合cpu安装架93,压紧机构7按压cpu安装架93,使卡扣94扣紧。
[0045]
11、辅助定位机构闭合cpu盖板92,锁螺丝机构5拧紧三颗螺丝91,cpu自动安装完成。
[0046]
实施例2:
[0047]
参照图1、图2、图3、图5,本实施例与实施例1的区别在于:不需要设置锁螺丝机构5,压紧机构7设置一根压杆72,压杆72端头设置有u型凹槽,该u型凹槽的尺寸与cpu底座上第一拉杆103和第二拉杆105的直径相匹配。
[0048]
图5为intel lga2011接口cpu底座的立体图,下面结合图5,介绍工业机器人利用本实用新型,借助装配流水线上的辅助定位机构实现自动安装intel lga2011接口cpu的过程。
[0049]
1、主板通过输送线运送到安装位置后,视觉检测机构3自动检测主板上的定位标识,确认cpu底座的位置和数量,确定需要安装的cpu数量。
[0050]
2、压紧机构7的压杆72按压第一拉杆103,并向外侧移动,第一拉杆103将脱离第一卡扣104后自动弹开。
[0051]
3、压紧机构7的压杆72按压第二拉杆105,并向外侧移动,第二拉杆105将脱离第二卡扣106后自动弹开。
[0052]
4、辅助定位机构将第二拉杆105掀开到最大角度。
[0053]
5、压紧机构7的压杆72轻轻按压第一拉杆103,cpu压板101将随之打开。
[0054]
6、辅助定位机构将cpu压板101掀开到最大角度。
[0055]
7、cpu供给机构4上的供料吸盘47吸附料盘上的cpu到安装位置。
[0056]
8、视觉检测机构3自动检测cpu上的安装标识,确认待安装cpu的位置。
[0057]
9、拾取机构6吸附cpu,将其轻轻放入cpu安装槽107内。
[0058]
10、辅助定位机构闭合cpu压板101,辅助定位机构闭合第二拉杆105,压紧机构7按压第二拉杆105,使其在第二卡扣106上扣紧。
[0059]
11、压紧机构7按压第一拉杆103,使其在第一卡扣104上扣紧。
[0060]
12、随着第二拉杆105和第一拉杆103的压紧,cpu保护盖102将自动弹开,抓取机构8抓取cpu保护盖102,并将其丢弃到废料箱中,cpu自动安装完成。
[0061]
最后说明的是,以上实施例仅用以说明本实用新型的技术方案而非限制,本领域
普通技术人员对本实用新型的技术方案所做的其他修改或者等同替换,只要不脱离本实用新型技术方案的精神和范围,均应涵盖在本实用新型的权利要求范围当中。
[0062]
以上仅为本实用新型的优选实施例而已,并不用于限制本实用新型,对于本领域的技术人员来说,本实用新型可以有各种更改和变化。凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1