一种电熔镁大型熔坨智能分选机械手
1.本实用新型涉及机械手领域,尤其涉及一种电熔镁大型熔坨智能分选机械手。
背景技术:
2.目前,在电熔镁生产领域,生产出炉的电熔镁熔坨一般为直径>3m、高>3m的圆柱体,外围绕有厚度不一的、比较坚硬的电熔镁皮砂,如果整体破碎就会将这些皮砂与合格的电熔镁砂相混淆,既影响了产品的质量,又造成经济损失。为此,在每出一炉电熔镁后都需人工将皮砂层去除,以提高所得镁砂的质量。然而,靠人工完成这一工作比较费时、费力,提高去除精度困难较大。
技术实现要素:
3.为了解决上述问题,本实用新型的目的在于提供一种电熔镁大型熔坨智能分选机械手,通过可旋转的电熔镁熔坨车与电熔镁大型熔坨智能分选机械手协调工作,根据工作进度自动完成机械臂回转、伸缩、俯仰,以及小臂可前后伸缩等动作,通过压力感知皮砂深度,并根根据熔坨不同部位的硬度实施进刀给进量,利用带有铣刀头的机械手臂,精准完成整个圆柱团体电熔镁熔坨的外围皮砂层的去除工作。
4.为了实现上述目的,本实用新型采用如下技术方案:
5.一种电熔镁大型熔坨智能分选机械手,包括机械臂底座、旋转轴、机械大臂、机械小臂、带有铣刀头的机械手,具体结构如下:机械臂底座设置于旋转轴上,机械臂设置于机械臂底座上,在旋转轴的带动下,可使机械臂底座上的机械臂360
º
旋转;所述的机械臂包括机械大臂、机械小臂、带有铣刀头的机械手,机械大臂的一端与机械臂底座通过销轴铰接,机械大臂的另一端与机械小臂的一端通过销轴铰接,第二液压缸的一端与机械臂底座铰接,第二液压缸的另一端铰接于机械小臂上,机械小臂另一端的第一液压缸上安装带有铣刀头的机械手。
6.所述的电熔镁大型熔坨智能分选机械手,旋转轴与旋转轴控制器相连。
7.所述的电熔镁大型熔坨智能分选机械手,机械手的前端安装压力传感器。
8.所述的电熔镁大型熔坨智能分选机械手,当旋转轴旋转时,通过机械臂底座带动机械大臂、机械小臂一同旋转;当第二液压缸伸缩时,带动机械大臂、机械小臂俯仰;当第一液压缸伸缩时,机械小臂通过第一液压缸的伸缩控制,使带有铣刀头的机械手完成电熔镁熔坨的去皮工作。
9.所述的电熔镁大型熔坨智能分选机械手,还包括电熔镁熔坨车,电熔镁熔坨车安装在旋转盘上,电熔镁熔坨车与熔坨车控制器连接,熔坨车控制器根据带有铣刀头的机械手工作进度,自动控制电熔镁熔坨车的旋转速度与旋转角度。
10.所述的电熔镁大型熔坨智能分选机械手,熔坨车控制器采用plc控制器,其中央处理器为西门子 plc s1200。
11.本实用新型的优点及有益效果是:
12.1、本实用新型是一种能自动定位控制并可以变动的多功能电熔镁熔坨去皮机器,可根据电熔镁熔坨的粗细、高矮,全方位自动探测去除皮砂。
13.2、本实用新型是能够克服现有炮锤粗略去皮质量分等影响质量的问题,或手工细分工人劳动强度大,劳力成本大的问题。而是根据皮砂的分布及不同的厚度,通过铣刀自动进深层铣,可精确地将皮砂与正品镁砂分离,以达到提高质量和经济效益的目的。
14.3、本实用新型将粗加工去除电熔镁皮砂的方法,改变成机械手智能化进深、精确去皮,不仅解决用工难、劳动强度大问题,而是工业制造自动化、精密化、智能化水平提升和产品品质提高的体现。
附图说明
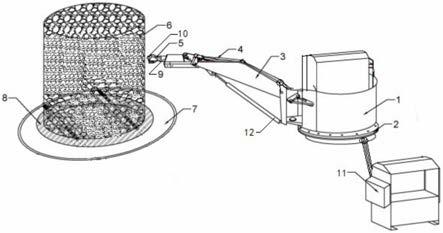
15.图1是本实用新型结构示意图;
16.图中,1机械臂底座,2旋转轴,3机械大臂,4机械小臂,5带有铣刀头的机械手,6电熔镁熔坨车,7旋转盘,8熔坨车控制器,9第一液压缸,10压力传感器,11旋转轴控制器,12第二液压缸。
具体实施方式
17.以下,结合附图对本实用新型做进一步详细描述。
18.如图1所示,本实用新型一种电熔镁大型熔坨智能分选机械手,主要包括:机械臂底座1、旋转轴2、机械大臂3、机械小臂4、带有铣刀头的机械手5、电熔镁熔坨车6、旋转盘7等,具体结构如下:
19.机械臂底座1设置于旋转轴2上,旋转轴2与旋转轴控制器11相连,机械臂设置于机械臂底座1上,在旋转轴2的带动下,可使机械臂底座1上的机械臂360
º
旋转;所述的机械臂包括机械大臂3、机械小臂4、带有铣刀头的机械手5,机械大臂3的一端与机械臂底座1通过销轴铰接,机械大臂3的另一端与机械小臂4的一端通过销轴铰接,第二液压缸12的一端与机械臂底座1铰接,第二液压缸12的另一端铰接于机械小臂4上,机械小臂4另一端的第一液压缸9上安装带有铣刀头的机械手5,机械手5的前端安装压力传感器10。
20.当旋转轴2旋转时,通过机械臂底座1带动机械大臂3、机械小臂4一同旋转;当第二液压缸12伸缩时,可以带动机械大臂3、机械小臂4俯仰;当第一液压缸9伸缩时,机械小臂4可通过第一液压缸9的伸缩控制,使带有铣刀头的机械手5完成电熔镁熔坨的去皮工作。
21.电熔镁熔坨车6安装在旋转盘7上,电熔镁熔坨车6与熔坨车控制器8连接,熔坨车控制器8根据带有铣刀头的机械手5工作进度,自动控制电熔镁熔坨车6的旋转速度与旋转角度。
22.实施方式:确立电熔镁熔坨与皮砂的特性,分析一般分拣方法与过程,制定控制方案,制作电熔镁熔坨车6,确定电熔镁熔坨车6与带有铣刀头的机械手5协调配合的时序与控制方式。当新的电熔镁熔坨车6置于旋转盘7上后,可根据不同的熔坨状况进行参数设置:包括熔坨大小、熔坨高度、底盘旋转速度、递进角度、决定机械手旋转、大臂上下摆动角度、小臂上下摆动角度,铣刀旋转切割、电熔镁熔坨车6的旋转角度等;电熔镁熔坨车6和带有铣刀头的机械手5就位于起始点,按照熔坨的实际体积、形状,带有铣刀头的机械手5实施探测与铣切,电熔镁熔坨车6根据带有铣刀头的机械手5工作进度随之自动旋转,直至完成全熔坨
去皮砂工作。
23.熔坨车控制器8和旋转轴控制器11均采用plc控制器,中央处理器为西门子 plc s1200,完成机械手动作驱动控制、电熔镁皮砂探测与铣切、旋转熔坨车控制设计。
24.本实用新型的工作原理与工作过程如下:
25.如图1所示,一种电熔镁大型熔坨智能分选机械手,利用压力传感器10自动感知和识别皮砂厚度、铣刀进深控制。带有铣刀头的机械手5控制要素包括工作顺序、到达位置、旋转角度、动作协调、动作时间、运动速度、旋转变向、加减速度等。机械手的控制分为点位控制和连续轨迹控制两种,适应各种体积形状及电熔镁皮砂的参数设计,将机械手定位控制,控制熔坨的起始点,机械臂旋转,液压大臂小臂仰俯角度,实时探测与进深铣切。电熔镁熔坨车6定位于旋转盘7上,当机械臂按照设定的机械臂旋转、仰俯及摆臂完成当前区域任务后,电熔镁熔坨车6随旋转盘7转动,直至整个熔坨去皮工作完成。
26.结果表明,本实用新型克服了现有工艺去皮砂质量分等难度大等问题,利用机械手智能化进深、精确去皮,提高了产品的质量,用机器换人换出产品效益。本实用新型解决了皮砂和电熔镁不能很好去除,影响质量,造成经济损失问题,同时减轻了人工成本和工人劳动强度。
技术特征:
1.一种电熔镁大型熔坨智能分选机械手,其特征是,包括机械臂底座、旋转轴、机械大臂、机械小臂、带有铣刀头的机械手,具体结构如下:机械臂底座设置于旋转轴上,机械臂设置于机械臂底座上,在旋转轴的带动下,可使机械臂底座上的机械臂360
º
旋转;所述的机械臂包括机械大臂、机械小臂、带有铣刀头的机械手,机械大臂的一端与机械臂底座通过销轴铰接,机械大臂的另一端与机械小臂的一端通过销轴铰接,第二液压缸的一端与机械臂底座铰接,第二液压缸的另一端铰接于机械小臂上,机械小臂另一端的第一液压缸上安装带有铣刀头的机械手。2.根据权利要求1所述的电熔镁大型熔坨智能分选机械手,其特征是,旋转轴与旋转轴控制器相连。3.根据权利要求1所述的电熔镁大型熔坨智能分选机械手,其特征是,机械手的前端安装压力传感器。4.根据权利要求1所述的电熔镁大型熔坨智能分选机械手,其特征是,当旋转轴旋转时,通过机械臂底座带动机械大臂、机械小臂一同旋转;当第二液压缸伸缩时,带动机械大臂、机械小臂俯仰;当第一液压缸伸缩时,机械小臂通过第一液压缸的伸缩控制,使带有铣刀头的机械手完成电熔镁熔坨的去皮工作。5.根据权利要求1所述的电熔镁大型熔坨智能分选机械手,其特征是,还包括电熔镁熔坨车,电熔镁熔坨车安装在旋转盘上,电熔镁熔坨车与熔坨车控制器连接,熔坨车控制器根据带有铣刀头的机械手工作进度,自动控制电熔镁熔坨车的旋转速度与旋转角度。6.根据权利要求5所述的电熔镁大型熔坨智能分选机械手,其特征是,熔坨车控制器采用plc控制器,其中央处理器为西门子 plc s1200。
技术总结
本实用新型涉及机械手领域,尤其涉及一种电熔镁大型熔坨智能分选机械手。该系统包括机械臂底座、旋转轴、机械大臂、机械小臂、带有铣刀头的机械手,具体结构如下:机械臂底座设置于旋转轴上,机械臂设置于机械臂底座上;所述的机械臂包括机械大臂、机械小臂、带有铣刀头的机械手,机械大臂的一端与机械臂底座通过销轴铰接,机械大臂的另一端与机械小臂的一端通过销轴铰接,第二液压缸的一端与机械臂底座铰接,第二液压缸的另一端铰接于机械小臂上,机械小臂另一端的第一液压缸上安装带有铣刀头的机械手。本实用新型解决了皮砂和电熔镁不能很好去除,影响质量,造成经济损失问题,同时减轻了人工成本和工人劳动强度。轻了人工成本和工人劳动强度。轻了人工成本和工人劳动强度。
技术研发人员:栾集程 王沁竹 栾禄毅
受保护的技术使用者:西安科技大学高新学院
技术研发日:2020.12.22
技术公布日:2021/9/3
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1