一种结构稳定的八轴焊接装置的制作方法
1.本实用新型涉及焊接机器人技术领域,具体为一种结构稳定的八轴焊接装置。
背景技术:
2.建筑结构行业被认为是一个发展较慢的传统行业;建筑行业广泛使用的框架结构,最近半个世纪都没有显著的改进和创新;“甲壳柱”和“甲壳梁”是利用波纹板和钢管、钢板焊接成柱、梁的外壳,然后在其中浇筑混凝土,形成一种新的组合构件,这种组合构件可以大大减少钢的用量,节约成本。但由于甲壳梁柱的尺寸都比较大,并且一般长度都比较长。一般现在对甲壳梁柱进行加工焊接通常是采用龙门架将焊接头吊装起来,然后通过龙门架调节焊接头的横向位置以及与待焊接甲壳梁柱之间的纵向高度,但是此种调节方式的占地面积较大,并且龙门架的这种调节方式不够稳定可靠;但是现在缺乏一种可以应用在上述场合的焊接机器人,以便能够对焊枪的空间位置进行稳定可靠的调节。
技术实现要素:
3.本实用新型的目的在于提供了一种结构稳定的八轴焊接装置,可以对焊接枪的空间位置进行稳定的调节。
4.为实现上述目的,本实用新型提供如下技术方案:一种结构稳定的八轴焊接装置,包括焊接装置本体,所述焊接装置本体包括焊接机器人、双轴驱动机构和驱动臂,所述焊接机器人固定安装在所述驱动臂上,所述双轴驱动机构包括升降组件和横向调节组件,所述升降组件用于调节所述驱动臂的纵向高度,所述横向调节组件用于调节所述驱动臂的横向位置,所述驱动臂远离所述焊接机器人的一侧设有平衡块。
5.优选的,所述焊接装置本体还包括固定立柱,所述升降组件包括滑移板,所述滑移板与所述固定立柱滑动连接。
6.优选的,所述固定立柱与所述滑移板相连接的一侧沿竖直方向设有若干相互平行的滑轨,所述滑移板上设有与所述滑轨相匹配的滑槽;所述固定立柱内部设有第一腔室,所述第一腔室内设有第一驱动组件,用于驱动所述滑移板相对所述固定立柱沿竖直方向运动。
7.优选的,所述第一驱动组件包括第一伺服电机以及与所述第一伺服电机输出轴相连接的第一驱动丝杆,所述滑移板上固定安装有与所述第一驱动丝杆相匹配的第一内螺纹套,所述第一驱动丝杆远离所述第一伺服电机的一侧通过轴承转动连接在所述第一腔室内部。
8.优选的,所述横向调节组件包括固定安装在所述滑移板远离所述滑槽一侧的固定框,所述固定框包括第一限位板和第二固定板,所述驱动臂滑动安装在所述固定框内;所述横向调节组件包括第二伺服电机以及与所述第二伺服电机输出轴固定连接的驱动齿轮,所述驱动臂与所述驱动齿轮相连接的一侧开设有第二腔室,所述第二腔室与所述驱动齿轮相接触的两侧均设有相互平行设置的齿条,所述驱动齿轮与设置在其两侧的齿条均啮合连
接。
9.优选的,以所述驱动齿轮的中心点为杠杆中心,定义当所述横向调节组件驱动所述驱动臂伸出至最大距离时,所述焊接机器人的自身重力给驱动臂施加的作用力矩为第一力矩f1,所述平衡块的自身重力给驱动臂施加的作用力矩为第二力矩f2,f1=1.1f2~1.3f2。
10.优选的,以所述驱动齿轮的中心点为杠杆中心,定义当所述横向调节组件驱动所述驱动臂缩回至最小距离时,所述焊接机器人的自身重力给驱动臂施加的作用力矩为第三力矩f3,所述平衡块的自身重力给驱动臂施加的作用力矩为第四力矩f4,f4=f3~1.3f3。
11.优选的,所述焊接机器人包括机械手臂,所述机械手臂上设有固定安装有焊枪,所述焊枪远离所述焊接机器人的一侧设有防撞器,所述防撞器包括一金属弹片和与所述金属弹片相连接的控制器,所述控制器用于检测所述金属弹片的形变程度。
12.优选的,所述焊枪上还固定安装有线激光跟踪器,用于对焊缝进行检测,所述线激光跟踪器与所述控制器电连接。
13.优选的,所述焊接机器人还包括与所述机械手臂固定连接的六轴驱动机构,所述六轴驱动机构用于驱动所述机械手臂沿不同的方向进行转动。
14.与现有技术相比,本实用新型的有益效果是:
15.本实用新型的焊接装置通过设置双轴驱动机构可以对焊接机器人的横向位置和纵向高度进行调节,能够对焊枪的空间位置进行稳定的调节,并且通过在连接焊接机器人的驱动臂远离焊接机器人的一侧设置平衡块,可以保证焊接机器人在横向位置移动过程的稳定性能。
16.本实用新型的焊接机器人包括机械手臂,机械手臂上设有固定安装有焊枪,焊枪远离焊接机器人的一侧设有防撞器,防撞器包括一金属弹片和与金属弹片相连接的控制器,以用于检测金属弹片的形变程度,根据其形变程度判断焊枪是否受到了阻挡。焊枪上还固定安装有线激光跟踪器,用于对焊缝进行检测,提高了焊接精度。
附图说明
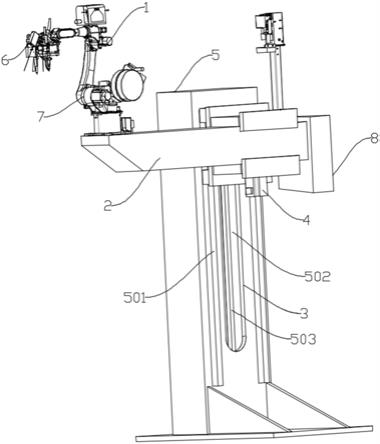
17.图1为本实用新型一种结构稳定的八轴焊接装置的结构示意图;
18.图2为本实用新型一种结构稳定的八轴焊接装置中焊接机器人的结构示意图;
19.图3为本实用新型一种结构稳定的八轴焊接装置中横向调节组件的结构示意图;
20.图4为本实用新型的图3中的a部放大结构示意图;
21.图5为本实用新型一种结构稳定的八轴焊接装置中滑移板的结构示意图。
22.图中:1、焊接机器人;101、机械手臂;102、焊枪;103、防撞器;104、金属弹片;2、驱动臂;3、升降组件;301、滑移板;302、滑槽;303、第一内螺纹套;4、横向调节组件;401、第一限位板;402、第二固定板;403、第二伺服电机;404、驱动齿轮;405、第二腔室;406、齿条;5、固定立柱;501、滑轨;502、第一腔室;503、第一驱动丝杆;6、线激光跟踪器;7、六轴驱动机构;8、平衡块。
具体实施方式
23.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行
清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
24.如图1所示,本实用新型提供的第一种实施例,一种结构稳定的八轴焊接装置,一种结构稳定的八轴焊接装置,包括焊接装置本体,所述焊接装置本体包括焊接机器人1、双轴驱动机构和驱动臂2,所述焊接机器人1固定安装在所述驱动臂2上,所述双轴驱动机构包括升降组件3和横向调节组件4,所述升降组件3用于调节所述驱动臂2的纵向高度,所述横向调节组件4用于调节所述驱动臂2的横向位置,通过设置双轴驱动机构可以对焊接机器人1的横向位置和纵向高度进行调节,能够对焊枪102的空间位置进行调节。
25.所述驱动臂2远离所述焊接机器人1的一侧设有平衡块,通过在连接焊接机器人1的驱动臂2远离焊接机器人1的一侧设置平衡块,可以保证焊接机器人1在横向位置移动过程的稳定性能。
26.如图2所示,为焊接机器人1的结构示意图,所述焊接机器人1包括机械手臂101,所述机械手臂101上设有固定安装有焊枪102,所述焊枪102远离所述焊接机器人1的一侧设有防撞器103,所述防撞器103包括一金属弹片104和与所述金属弹片104相连接的控制器,所述控制器用于检测所述金属弹片104的形变程度。
27.优选的,所述焊枪102上还固定安装有线激光跟踪器6,用于对焊缝进行检测,所述线激光跟踪器6与所述控制器电连接。
28.通过在机械手臂101上固定安装有焊枪102,焊枪102远离焊接机器人1的一侧设有防撞器103,防撞器103包括一金属弹片104和与金属弹片104相连接的控制器,以用于检测金属弹片104的形变程度,根据其形变程度判断焊枪102是否受到了阻挡。焊枪102上还固定安装有线激光跟踪器6,用于对焊缝进行检测,提高了焊接精度。
29.优选的,所述焊接机器人1还包括与所述机械手臂101固定连接的六轴驱动机构7,所述六轴驱动机构7用于驱动所述机械手臂101沿不同的方向进行转动;六轴驱动机构7和双轴驱动机构结合在一起,可以实现对机械手臂101八轴方向的控制,保证焊接更精准。
30.如图1、图3、图4和图5所示,所述焊接装置本体还包括固定立柱5,所述升降组件3包括滑移板301,所述滑移板301与所述固定立柱5滑动连接,所述固定立柱5与所述滑移板301相连接的一侧沿竖直方向设有若干相互平行的滑轨501,所述滑移板301上设有与所述滑轨501相匹配的滑槽302;所述固定立柱5内部设有第一腔室502,所述第一腔室502内设有第一驱动组件,用于驱动所述滑移板301相对所述固定立柱5沿竖直方向运动;所述第一驱动组件包括第一伺服电机以及与所述第一伺服电机输出轴相连接的第一驱动丝杆503,所述滑移板301上固定安装有与所述第一驱动丝杆503相匹配的第一内螺纹套303,所述第一驱动丝杆503远离所述第一伺服电机的一侧通过轴承转动连接在所述第一腔室502内部。
31.如图3和图4所示,所述横向调节组件4包括固定安装在所述滑移板301远离所述滑槽302一侧的固定框,所述固定框包括第一限位板401和第二固定板402,所述驱动臂2滑动安装在所述固定框内;所述横向调节组件4包括第二伺服电机403以及与所述第二伺服电机403输出轴固定连接的驱动齿轮404,所述驱动臂2与所述驱动齿轮404相连接的一侧开设有第二腔室405,所述第二腔室405与所述驱动齿轮404相接触的两侧均设有相互平行设置的齿条406,所述驱动齿轮404与设置在其两侧的齿条406均啮合连接,通过驱动齿轮404旋转
带动齿条406横向运动,进而调节驱动臂2的横向位置。
32.优选的,以所述驱动齿轮404的中心点为杠杆中心,定义当所述横向调节组件4驱动所述驱动臂2伸出至最大距离时,所述焊接机器人1的自身重力给驱动臂2施加的作用力矩为第一力矩f1,所述平衡块的自身重力给驱动臂2施加的作用力矩为第二力矩f2,f1=1.1f2~1.3f2。平衡块的作用是用来平衡焊接机器人1在伸出距离逐渐变大的过程中,会导致整个焊接装置的重心偏移,会造成对焊接精度的影响,但是平衡块不能太重,否则会导致中心向平衡块一侧偏移,同样会影响焊接精度,并且也会横向位置调节的效以及会加大纵向调节的整体重量。
33.优选的,以所述驱动齿轮404的中心点为杠杆中心,定义当所述横向调节组件4驱动所述驱动臂2缩回至最小距离时,所述焊接机器人1的自身重力给驱动臂2施加的作用力矩为第三力矩f3,所述平衡块8的自身重力给驱动臂2施加的作用力矩为第四力矩f4,f4=f3~1.3f3;平衡块8的作用是用来平衡焊接机器人1在伸出距离逐渐变大的过程中,会导致整个焊接装置的重心偏移,会造成对焊接精度的影响,但是平衡块不能太重,否则会导致中心向平衡块一侧偏移,同样会影响焊接精度,并且也会横向位置调节的效以及会加大纵向调节的整体重量,平衡块太轻的话,也达不到平衡焊接机器人1重量的作用。
34.工作原理:本实用新型通过设置双轴驱动机构可以对焊接机器人1的横向位置和纵向高度进行调节,并且通过在连接焊接机器人1的驱动臂2远离焊接机器人1的一侧设置平衡块,可以保证焊接机器人1在横向位置移动过程的稳定性能。焊接机器人1的机械手臂101上设有固定安装有焊枪102,焊枪102远离焊接机器人1的一侧设有防撞器103,防撞器103包括一金属弹片104和与金属弹片104相连接的控制器,以用于检测金属弹片104的形变程度,根据其形变程度判断焊枪102是否受到了阻挡。焊枪102上还固定安装有线激光跟踪器6,用于对焊缝进行检测,提高了焊接精度。
35.对于本领域技术人员而言,显然本实用新型不限于上述示范性实施例的细节,而且在不背离本实用新型的精神或基本特征的情况下,能够以其他的具体形式实现本实用新型。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本实用新型的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本实用新型内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1