一种锯床进料定位装置的制作方法
1.本技术涉及铝合金型材加工设备领域,尤其是涉及一种锯床进料定位装置。
背景技术:
2.铝合金是工业中应用最广泛的一类有色金属结构材料,随着工业经济的飞速发展,对铝合金结型材的需求日益增多,因为铝合金型材本身质量轻,被应用于门窗制作,在门窗制作过程中需要锯床对铝合金型材进行剪切。
3.申请号201420832039.5的中国专利公开了一种可自动进料的带锯床,具有带锯床本体,在带锯床本体的进料一端设置有自动进料装置,在带锯床本体的出料一端设置有定位装置。
4.针对上述中的相关技术,发明人认为,带锯床剪切过程中,工件易发生歪斜,影响工件的剪切精度。
技术实现要素:
5.为了提高工件的剪切精度,本技术提供一种锯床进料定位装置。
6.本技术提供的一种锯床进料定位装置,采用如下的技术方案:
7.一种锯床进料定位装置,包括支架、送料构件以及压紧构件,所述送料构件和压紧构件均位于所述支架上,且所述送料构件能够对工件进行输送,所述压紧构件包括连接板、至少一个第一气缸以及至少一个压板,所述压板位于所述连接板上,且全部所述压板沿所述连接板长度方向分布,所述第一气缸的活塞杆与所述连接板连接。
8.通过采用上述技术方案,使用锯床进料定位装置时,首先调节送料构件,将工件运送至定位工位,再调节第一气缸,第一气缸的活塞杆带动连接板运动,连接板带动压板运动,运动至压板将工件压紧,实现工件的压紧;设计的锯床进料定位装置,通过压紧构件,便于工件的压紧,进而便于工件的剪切,提高锯床进料定位装置的稳定性,同时,提高工件的剪切精度。
9.可选的,所述送料构件包括驱动组件、滑轨以及推杆,所述滑轨位于所述支架上,所述推杆与滑轨滑移连接,所述驱动组件能够驱动所述推杆推动工件运动。
10.通过采用上述技术方案,对工件进行输送时,将工件放置在滑轨上,再调节驱动组件,驱动组件驱动推杆沿滑轨运动,推杆推动工件运动,运动至定位工位;送料构件的设置,便于工件的输送,避免运输过程中工件的偏斜,提高送料构件输送的稳定性。
11.可选的,所述滑轨两侧设置有挡板,所述挡板位于所述支架上。
12.通过采用上述技术方案,挡板的设置,避免工件输送过程中掉落,提高工作环境的安全性。
13.可选的,所述驱动组件包括驱动块以及传送带,所述传送带能够带动驱动块运动,所述驱动块远离所述传送带一侧与所述推杆连接,所述传送带位于所述支架上。
14.通过采用上述技术方案,对工件进行输送时,调节传送带,传送带带动驱动块运
动,驱动块驱动推杆运动,推杆推动工件运动;驱动组件的设置,便于对推杆施力,使得推杆运动,进而带动工件运动。
15.可选的,所述驱动块包括固定段和驱动段,所述固定段和驱动段可拆卸连接,所述传送带的皮带位于所述固定段和驱动段之间,所述固定段远离所述驱动段一侧与所述推杆连接,所述驱动段靠近所述传送带一侧设置有第一齿牙,所述传送带靠近所述驱动段一侧设置有与所述第一齿牙啮合的第二齿牙。
16.通过采用上述技术方案,输送工件时,调节传送带,传送带带动第二齿牙运动,第二齿牙和第一齿牙啮合传动,第一齿牙带动驱动段运动,驱动段带动固定段运动,固定段带动推杆运动,推杆推动工件运动;驱动块的设置,便于与传送带的啮合传动,提高工件输送的稳定性。
17.可选的,所述推杆为伸缩杆,所述推杆包括固定杆和滑移杆,所述滑移杆与所述固定杆滑移连接,所述滑移杆在所述固定杆上的位置通过限位件调节,所述固定杆远离所述滑移杆一端与所述固定段连接。
18.通过采用上述技术方案,推杆的设置,便于对不同尺寸的工件输送,进而便于对不同尺寸的工件进行加工,提高锯床进料定位装置的实用性。
19.可选的,还包括定位构件,所述定位构件包括定位块、夹紧块以及第二气缸,所述定位块、夹紧块以及第二气缸均位于所述支架上,且所述夹紧块与所述支架滑移连接,所述夹紧块远离所述定位块一侧与所述第二气缸的活塞杆连接。
20.通过采用上述技术方案;当工件运送至定位工位时,调剂第二气缸,第二气缸的活塞杆带动夹紧块将工件调正,使得工件远离夹紧块一侧与定位块抵接;定位构件的设置,便于工件剪切前的调正,进而提高锯床进料定位装置的定位精准度,同时,提高工件的剪切精度。
21.可选的,所述支架上开设有滑槽,所述滑槽内嵌设有能够沿所述滑槽滑移的滑块,所述滑块位于所述夹紧块上,且所述滑槽的长度方向与所述第二气缸活塞杆的轴向方向平行设置。
22.通过采用上述技术方案,滑块和滑槽的设置,便于夹紧块的定向运动,进而便于工件的调正,提高锯床进料定位装置的定位精准度。
23.综上所述,本技术包括以下至少一种有益技术效果:
24.1.设计的锯床进料定位装置,通过压紧构件,便于工件的压紧,进而便于工件的剪切,提高锯床进料定位装置的稳定性,同时,提高工件的剪切精度;
25.2.送料构件的设置,便于工件的输送,避免运输过程中工件的偏斜,提高送料构件输送的稳定性;
26.3.定位构件的设置,便于工件剪切前的调正,进而提高锯床进料定位装置的定位精准度,同时,提高工件的剪切精度。
附图说明
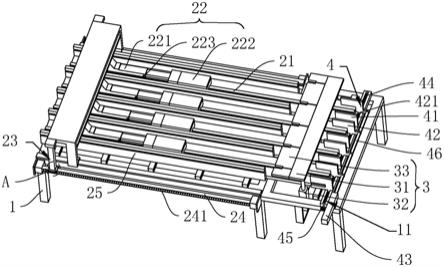
27.图1是本实施例一种锯床进料定位装置的整体结构示意图。
28.图2是图1的a部放大图。
29.附图标记说明:1、支架;11、滑槽;2、送料构件;21、滑轨;22、推杆;221、固定杆;
222、滑移杆;223、抵紧螺栓;23、驱动块;231、固定段;232、驱动段;2321、第一齿牙;24、传送带;241、第二齿牙;25、挡板;3、压紧构件;31、连接板;32、第一气缸;33、压板;4、定位构件;41、定位块;42、夹紧块;421、滑块;43、第二气缸;44、螺杆;45、手柄;46、连接杆。
具体实施方式
30.以下结合附图1
‑
2对本技术作进一步详细说明。
31.本技术实施例公开一种锯床进料定位装置。参照图1,锯床进料定位装置包括支架1、送料构件2、压紧构件3以及定位机构,送料构件2、压紧构件3以及定位机构均位于支架1上,且送料构件2能够对工件进行输送,压紧构件3能够将工件压紧,便于工件剪切,定位构件4能够对工件进行调正,便于工件的剪切,提高工件的剪切精度。
32.参照图1,压紧构件3包括连接板31、至少一个第一气缸32以及至少两个压板33,本实施例中设置有三个第一气缸32、四个压板33,在其他实施例中设置一个第一气缸32和一个压板33也可实施,四个压板33均焊接于连接板31上,且四个压板33沿连接板31长度方向均匀分布,第一气缸32的活塞杆与连接板31焊接,三个第一气缸32沿连接板31长度方向均匀分布。
33.参照图1和图2,送料构件2包括驱动组件、滑轨21以及推杆22,本实施例中设置有四个滑轨21、四个推杆22,推杆22和滑轨21一一对应设置,在其他实施例中滑轨21和推杆22均设为一个也可实施,滑轨21焊接于支架1上,推杆22与滑轨21滑移连接,驱动组件能够驱动推杆22推动工件运动;驱动组件包括驱动块23以及传送带24,传送带24能够带动驱动块23运动,驱动块23远离传送带24一侧与推杆22连接,传送带24通过安装座焊接于支架1侧壁上;驱动块23包括固定段231和驱动段232,固定段231和驱动段232通过螺栓连接,传送带24的皮带位于固定段231和驱动段232之间,固定段231远离驱动段232一侧与推杆22焊接,驱动段232靠近传送带24一侧一体连接有第一齿牙2321,传送带24靠近驱动段232一侧一体连接有与第一齿牙2321啮合的第二齿牙241;推杆22能够伸缩便于对不同长度的工件进行输送,推杆22为伸缩杆,推杆22包括固定杆221和滑移杆222,滑移杆222与固定杆221滑移连接,滑移杆222在所述固定杆221上的位置通过限位件调节,本实施例中限位件为抵紧螺栓223,抵紧螺栓223贯穿滑移杆222与固定杆221的侧壁抵紧,抵紧螺栓223便于调节滑移杆222的位置,进而便于对不同长度的工件进行输送,固定杆221远离滑移杆222一端与固定段231焊接,滑轨21两侧设置有挡板25,挡板25焊接于支架1上,挡板25能够避免工件输送过程中掉落。
34.参照图1,定位构件4包括定位块41、夹紧块42以及第二气缸43,本实施例中设置有一个第二气缸43、四个定位块41以及四个夹紧块42,定位块41、夹紧块42以及第二气缸43均位于支架1上,且定位块41和夹紧块42均与支架1滑移连接,第二气缸43通过螺栓与支架1连接,四个夹紧块42通过连接杆46焊接,连接杆46为圆柱状,且四个夹紧块42沿连接杆46的轴向方向均匀分布,连接杆46远离夹紧块42一端与第二气缸43的活塞杆焊接,且第二气缸43能够驱动夹紧块42与工件抵紧;支架1上开设有滑槽11,滑槽11内嵌设有滑块421,滑块421焊接于夹紧块42上,且滑槽11的长度方向与第二气缸43活塞杆的轴向方向平行设置;四个定位块41通过螺杆44连接,且每一定位块41均与螺杆44螺纹连接,螺杆44嵌设于滑槽11内,且螺杆44的最高点低于滑块421的底壁设置,螺杆44伸出支架1的延伸段上焊接有手柄45,
螺杆44便于定位块41位置的调整,进而便于对不同横截面积的工件定位,提高锯床进料定位装置的实用性。
35.本技术实施例一种锯床进料定位装置的实施原理为:使用锯床进料定位装置时,将工件放置在滑轨21上,然后调节传送带24,传送带24带动第二齿牙241运动,第二齿牙241和第一齿牙2321啮合传动,第一齿牙2321带动驱动段232运动,驱动段232带动固定段231运动,固定段231带动推杆22运动,推杆22推动工件运动,当工件运送至定位工位时,调剂第二气缸43,第二气缸43的活塞杆带动夹紧块42将工件调正,使得工件远离夹紧块42一侧与定位块41抵接,实现工件的定位;然后传送带24反向转动,推动推杆22运动,运动至推杆22复位,便于下次工件的运输。
36.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1