无感电阻芯片冲压焊接一体机的制作方法
1.本发明涉及无感电阻生产制造技术领域,特别涉及一种无感电阻芯片冲压焊接一体机。
背景技术:
2.无感电阻是指电阻上的感抗值非常小,可以忽略不计,一些精密的仪器仪表设备,电子工业设备常常需要用到此类无感电阻,因为普通具有高感抗的电阻在使用中容易产生震荡,损坏回路中的其他器件。被广泛应用于显示器、计算机周边设备、自动化控制系统、变频控制系统、变频空调、电源设备、高档音响等电路中。
3.无感电阻一般包括无感电阻芯片引脚,引脚从无感电阻芯片引出并延伸至外壳外部,外壳采用高导热ai2o3陶瓷材料;制造无感电阻的方法包括如下步骤:a)提供无感电阻芯片、高导热绝缘材料、引脚;b)实现无感电阻芯片与引脚电连接;c)将无感电阻芯片插入高导热高频陶瓷壳内,使引脚延伸至所述陶瓷外壳外部,先用硅树脂进行封装、然后进行干燥、烘烤。引脚与无感电阻芯片通过焊接等方式实现电连接;通常此类电阻器非常小,引脚、无感电阻芯片的体积都非常小,人工难以对单个无感电阻芯片和引脚进行焊接,因此,需要设计一引脚、无感电阻芯片的自动焊接设备。
技术实现要素:
4.本发明要解决的技术问题是提供一种无感电阻芯片冲压焊接一体机,能够实现无感电阻芯片料带自动冲压加工、引脚自动加工整形,并将料带与引脚自动送料焊接,结构紧凑,稳定性好。
5.为了解决上述技术问题,本发明的技术方案如下:
6.本发明提供了一种无感电阻芯片冲压焊接一体机,包括机架动力机构、设置在所述机架动力机构的台面板上的自动送带机构、冲压机构、自动送线机构、切线机构、引脚移送机构、引脚整形机构、料带轨道机构、料带定位移送机构以及激光焊接机构,所述台面板设置在一机架上,所述机架内设置有驱动电机以及与所述驱动电机连接的动力轴,所述动力轴对应所述自动送带机构、所述冲压机构、所述自动送线机构、所述切线机构、所述引脚移送机构、所述引脚整形机构、所述料带轨道机构和所述料带定位移送机构设置有送带凸轮、冲压凸轮、切线凸轮、整形凸轮、夹线夹张闭凸轮、引脚移送凸轮、料带移送凸轮、移送针凸轮、定位针凸轮和定位滑杆凸轮;通过设置凸轮参数,使得带材通过所述自动送带机构进入到所述冲压机构形成料带主体进入到所述料带轨道机构和所述料带定位移送机构;线材通过所述自动送线机构进入到所述切线机构剪切形成引脚,所述引脚通过所述引脚移送机构和所述引脚整形机构进行整形后夹持定位移送到所述料带轨道机构上焊接工位,所述激光焊接机构在所述焊接工位将所述引脚焊接在所述料带主体形成无感电阻芯片料带。
7.本发明的无感电阻芯片冲压焊接一体机,通过设置自动送带机构和冲压机构以及设置送带凸轮和冲压凸轮的轮廓曲线等参数使得带材能够自动化地通过送带滚轮向冲压
机构的冲切导槽移送,带材依次通过冲切导槽内的冲切块组件和冲切承块组件,在送带凸轮和冲压凸轮作用下间歇性地通过冲切导槽,并完成冲切工序。
8.进一步的,所述动力轴包括主动轴和从动轴,所述主动轴和所述从动轴通过若干轴安装座并排设置在所述台面板下方,所述驱动电机通过一电机座板设置在所述机架内,所述驱动电机通过皮带与所述主动轴连接,所述主动轴一端通过齿轮组驱动所述从动轴;所述主动轴上设置有所述引脚移送凸轮、所述切线凸轮、所述整形凸轮、所述夹线夹张闭凸轮和所述定位针凸轮,所述从动轴上设置有所述送带凸轮、所述冲压凸轮、所述料带移送凸轮、所述移送针凸轮以及所述定位滑杆凸轮。本案中还采用驱动电机来驱动动力轴的工作,进而带动各凸轮的同步工作,这样能够简化装置内部驱动部件的布设,优化设备空间,同时采用一个动力源驱动较多部件工作,能够较佳的节省生产能耗。同时本案为保证焊接质量,在焊接前进行整形定位以保证焊接精准性。
9.进一步的,所述自动送线机构包括送线支架、设置在所述送线支架上的送线座板,所述送线座板上设置有送线轮以及围绕所述送线轮设置的若干压线轮组件,对应所述送线轮在所述送线座板下侧设置有送线马达;所述送线座板一侧设置有送线管,线材从所述送线管进入到所述送线轮和所述压线轮组件之间;所述送线支架另一侧还设置有送线连接板,所述线材穿设所述送线连接板到达切线工位。自动送线机构的设计用于实现对线材的自动化传送,替代人工手动传送,且在传送过程中采用压线组件进行压线,保证线材传送过程处于较为平稳状态,相较于人工或其他方案而言,本案解决了传送不平稳的问题,特别是避免了传送过程中线材可能出现的偏移或相对折弯问题出现,且有效保证了线材能够较为快速且精准的到达切线工位。
10.进一步的,所述切线机构包括切线滑座,所述切线滑座内设置有切线滑杆,所述切线滑杆下端与所述切线凸轮配合,所述切线滑杆上端设置有切线连接块,所述切线连接块上通过一管刀座设置有管刀,对应所述管刀设置有相互配合的切刀,所述切刀通过一切刀固定块安装在所述送线连接板上。通过设定送线速度来控制线材进行切断的长度,其中线材以固定长度达到管刀与切刀之间切断形成引脚。
11.进一步的,所述引脚移送机构包括引脚移送支架,通过若干引脚移送滑杆在所述引脚移送支架内设置有引脚移送滑座,所述引脚移送滑座上连接设置有引脚夹持座,所述引脚夹持座内设置有若干由上夹组件和下夹组件形成的引脚夹持部,所述引脚夹持部用于夹持线材切断形成的引脚;所述引脚移送滑座一端铰接设置有引脚移送连杆,所述引脚移送连杆通过一引脚移送摆臂与所述引脚移送凸轮连接。
12.具体的,所述上夹组件通过一上夹滑块设置在所述引脚夹持座,所述下夹组件通过一下夹滑块设置在所述引脚夹持座,所述上夹滑块和所述下夹滑块贴合设置,所述上夹滑块和所述下夹滑块贴合处设置有开夹齿条部,对应所述开夹齿条部在所述上夹滑块和所述下夹滑块之间设置有开夹齿轮。
13.可选的,所述开夹齿轮通过一开夹齿轮座设置在所述上夹滑块和所述下夹滑块一侧;使用时,上夹滑块与下夹滑块在开夹齿轮上相对滑动,使得上夹组件和下夹组件之间形成开合动作。
14.具体的,所述台面板下侧对应所述引脚夹持座设置有开夹固定块,所述开夹固定块设置有开夹作用滑轨,所述开夹作用滑轨对应所述下夹滑块的下端设置有开夹作用块,
所述开夹作用块通过开闭摆臂与夹线夹张闭凸轮连接。
15.进一步的,所述引脚整形机构包括整形滑座、整形滑杆、设置在所述整形滑座上端的整形滑块,所述整形滑杆下端通过一整形滑板与所述整形凸轮连接,驱动所述整形滑块;在所述整形滑块上设置有整形压块,对应所述整形压块下方设置有整形座板,所述引脚移送机构将切线工位的引脚移送到所述整形压块和所述整形座板之间的整形工位。所述引脚移送机构将切线工位的引脚移送到所述整形压块和所述整形座板之间的整形工位,进行整形,使所获得的引起形状符合焊接要求以及加工形状,在整形的过程中能够将引脚在切割中可能产生的毛刺进行消除提高引脚加工质量,同时引脚与各整形部件的接触能够使其与各部件接触面积扩大,有利于将引脚在切割过程中可能残留的热量传递散发,保证后续焊接质量。
16.进一步的,所述冲压机构包括一设置在所述台面板上的支撑架,所述支撑架上端设置有模架底板,所述模架底板上设置有若干导柱,所述导柱上端设置有模架板,所述模架板下端通过若干料带压块导柱设置有上模块;所述模架底板上通过一下模连接板设置有下模板,所述上模块与所述下模板相对设置冲切块组件和冲切承块组件,带材依次通过所述冲切块组件和所述冲切承块组件之间。通过冲切的方式对带材快速切割相较于普通切割而言带材切割所产生毛刺的几率能够得到降低,同时对于冲切的带材依次通过所述冲切块组件和所述冲切承块组件之间能够保持稳定的冲切工序,即冲切的一致性得到有效保证,避免冲切误差出现。
17.进一步的,所述上模块设置在一料带压块上,所述冲切块组件穿设所述料带压块与所述下模板上的冲切承块组件相互配合,所述料带压块通过所述料带压块导柱连接到所述模架板下端,所述料带压块与所述模架板之间还设置有料带压紧弹簧。料带压块的设计用于对冲切的带材起到压紧作用,特别是对于冲切位置点附近带材压紧,这样能够保证冲切过程中带材无偏移以及冲切质量,同时在对带材压紧的同时有利于冲切所产生的冲击力以及热量能够从带材上传递至料带压块来降低冲切对其质量影响。
18.进一步的,所述冲切承块组件设置在所述下模板上的冲切导槽内,对应所述冲切导槽在所述下模板一侧设置有料带限位块,所述料带限位块固定在一限位滑杆块上;所述下模连接板内设置有若干料带限位滑杆,所述料带限位滑杆一端固定在一滑杆连接块,另一端安装所述限位滑杆块,对应所述限位滑杆块在所述模架板上设置有料带限位臂。
19.进一步的,所述台面板上设置有冲压摆臂座,所述冲压摆臂座内铰接设置有冲压摆臂,所述冲压摆臂一端与所述冲压凸轮连接,另一端通过一冲压摆臂调节块作用到所述模架板上端,驱动所述上模块与下模板合模冲切。
20.进一步的,所述自动送带机构包括送带安装块和滚轮座,所述送带安装块将所述滚轮座设置在所述台面板或者支撑架一侧,所述滚轮座内通过第一滚轮轴和第二滚轮轴分别安装有第一送带滚轮和第二送带滚轮,所述第一滚轮轴和所述第二滚轮轴一端分别设置有相互配合的第一齿轮和第二齿轮,所述第一滚轮轴或者所述第二滚轮轴的其中一端通过一送带摆臂与所述送带凸轮连接;带材通过所述第一送带滚轮和所述第二送带滚轮之间进入到所述冲压机构。
21.进一步的,所述台面板上还设置有料带轨道机构,包括导料立板以及料带轨道托板,所述导料立板设置在料带移送支架,所述料带轨道托板设置在所述导料立板下方,所述
引脚整形机构设置在所述料带轨道托板的前端,在所述导料立板上设置有若干导料轮,料带依次通过所述导料轮进入到水平设置的所述料带轨道托板,随着料带移送方向对应所述料带轨道托板设置有料带定位移送机构,所述料带定位移送机构包括所述料带移送支架、通过若干料带移送滑杆设置在所述料带移送支架内的料带移送滑座、定位针滑座,所述料带移送滑座上设置有移送针竖直滑座,所述移送针竖直滑座设置有移送针竖直滑杆,所述移送针竖直滑杆通过一移送针连接头安装有移送针,所述移送针穿设料带轨道托板;所述定位针滑座内设置有定位针竖直滑杆,所述定位针竖直滑杆穿设料带轨道托板,在所述定位针竖直滑杆的顶端通过一定位针安装块设置有若干定位针,所述定位针对应所述料带轨道托板上的焊接工位设置,将料带主体定位在所述焊接工位。
22.进一步的,所述引脚移送滑座与所述料带轨道托板之间的台面板上设置有校正夹持座,所述校正夹持座上端对应所述整形工位和所述焊接工位分别设置有校正夹持爪和暂存夹持爪;所述校正夹持座内设置有校正夹持传动杆,所述校正夹持传动杆下端与定位滑杆凸轮连接,所述定位针竖直滑杆下端设置有定位针竖直摆臂,所述定位针竖直摆臂一端通过竖直拨动块连接到所述校正夹持传动杆;所述校正夹持座内所述校正夹持传动杆通过一校正推杆驱动一组所述校正夹持爪分别在校正铰接座上开合;所述校正夹持传动杆通过所述竖直拨动块驱动一暂存夹持推杆在暂存夹持滑座上移动,所述暂存夹持推杆上端设置所述暂存夹持爪。
23.进一步的,所述激光焊接机构包括设置在所述台面板上的激光升降滑座、激光发射器以及激光头,所述激光发射器可升降地设置在所述激光升降滑座上,所述激光发射器驱动所述激光头,所述激光头对应所述焊接工位设置。
24.可选的,所述激光升降滑座上端设置有激光升降手柄,所述激光升降手柄用于调整所述激光发射器的竖直高度。
25.进一步的,所述无感电阻芯片冲压焊接一体机还包括控制器,所述控制器通过一控制器支架安装在所述台面板,所述控制器上设置有显示屏、控制按键以及指示灯。
26.本发明的有益效果:
27.本发明的无感电阻芯片冲压焊接一体机,通过设置自动送带机构和冲压机构,设置送带凸轮和冲压凸轮的轮廓曲线等参数使得带材能够自动化地通过送带滚轮向冲压机构的冲切导槽移送,带材依次通过冲切导槽内的冲切块组件和冲切承块组件,在送带凸轮和冲压凸轮作用下间歇性地通过冲切导槽,并完成冲切工序,形成料带主体;同时,通过切线凸轮、整形凸轮、定位滑杆凸轮、夹线夹张闭凸轮、定位针凸轮、引脚移送凸轮结合送线马达,使得线材以固定长度达到管刀与切刀之间切断形成引脚,设置切线凸轮、整形凸轮、定位滑杆凸轮、夹线夹张闭凸轮、定位针凸轮、引脚移送凸轮的轮廓曲线等参数使得引脚以间歇性稳定地从切线工位依次移送到整形工位、焊接工位;料带主体通过定位针凸轮、料带移送凸轮、移送针凸轮和定位滑杆凸轮驱动定位针、移送针沿着传送方向平行以及垂直两个方向往复间歇性移动,通过设置定位针凸轮、料带移送凸轮、移送针凸轮和定位滑杆凸轮的轮廓曲线等参数,使得料带主体在移送过程中采用移送针周期性地拨动移送双节距,通过焊接工位进行定位并利用激光将引脚焊接在料带主体,形成无感电阻芯片料带,自动化运行,结构紧凑,稳定性好。
附图说明
28.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
29.图1为本发明的无感电阻芯片冲压焊接一体机三维结构图一;
30.图2为为图1中a出局部放大图;
31.图3为本发明的无感电阻芯片冲压焊接一体机三维结构图二;
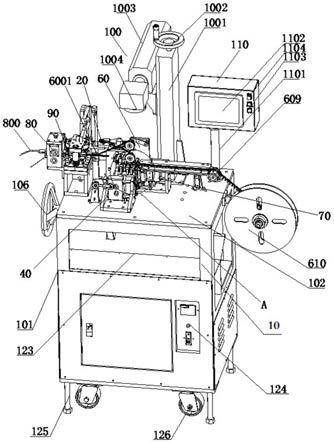
32.图4为本发明的无感电阻芯片冲压焊接一体机主视结构图;
33.图5为本发明的无感电阻芯片冲压焊接一体机后视结构图;
34.图6为本发明的无感电阻芯片冲压焊接一体机侧视结构图;
35.图7为本发明的无感电阻芯片冲压焊接一体机俯视结构图;
36.图8为本发明的无感电阻芯片冲压焊接一体机部分省略三维结构图一;
37.图9为本发明的无感电阻芯片冲压焊接一体机部分省略三维结构图二;
38.图10为本发明的无感电阻芯片冲压焊接一体机部分省略三维结构图三;
39.图11为本发明的无感电阻芯片冲压焊接一体机部分省略三维结构图四;
40.图12为本发明的引脚夹持座三维分解结构图;
41.图13为本发明的引脚整形机构三维分解结构图;
42.图14为本发明的校正夹持座三维分解结构图;
43.图15为本发明的自动送带机构三维分解结构图;
44.图16为本发明的冲压机构三维分解结构图一;
45.图17为本发明的冲压机构三维分解结构图二;
46.图18为发明的冲压机构中带材冲切工序示意图;
47.图中,10
‑
机架动力机构,101
‑
机架,102
‑
台面板,103
‑
驱动电机,104
‑
皮带,105
‑
主动轴,106
‑
手轮,107
‑
齿轮组,108
‑
从动轴,109
‑
引脚移送凸轮,110
‑
切线凸轮,111
‑
整形凸轮,112
‑
夹线夹张闭凸轮,113
‑
冲压凸轮,114
‑
送带凸轮,115
‑
料带移送凸轮,116
‑
移送针凸轮,117
‑
定位针凸轮,118
‑
定位滑杆凸轮,119
‑
编码盘,120
‑
光电门,121
‑
光电门安装板,122
‑
电机座板,123
‑
防护罩板,124
‑
电源驱动组件,125
‑
可调支撑脚,126
‑
万向轮,127
‑
轴安装座;
48.20
‑
自动送线机构,200
‑
线材,201
‑
送线支架,202
‑
送线管,203
‑
线管夹板,204
‑
导线轮,205
‑
走线感应器,206
‑
送线座板,207
‑
送线夹板,208
‑
送线马达,209
‑
送线轮,210
‑
压线轮组件,211
‑
送线调节轮,212
‑
送线连接板;
49.30
‑
切线机构,301
‑
切线滑座,302
‑
切线滑杆,303
‑
切线连接块,304
‑
管刀座,305
‑
管刀,306
‑
切刀固定块,307
‑
切刀;
50.40
‑
引脚移送机构,401
‑
引脚移送支架,402
‑
引脚移送滑杆,403
‑
引脚移送滑座,404
‑
引脚移送连杆,405
‑
引脚移送摆臂,406
‑
移送摆臂安装座,407
‑
上夹滑块,408
‑
上夹组件,409
‑
下夹滑块,410
‑
下夹组件,411
‑
引脚夹持座,412
‑
开闭摆臂,413
‑
开夹作用块,414
‑
开夹固定块,415
‑
开夹齿条部,416
‑
开夹齿轮,417
‑
开夹齿轮座,418
‑
夹持座盖板,419
‑
开夹作用滑轨,420
‑
引脚夹开闭座;
51.50
‑
引脚整形机构,501
‑
整形滑座,502
‑
整形滑杆,503
‑
整形滑板,504
‑
整形滑块,505
‑
整形压块,506
‑
整形座板,507
‑
整形承板,508
‑
铰接拉杆,509
‑
整形开合座,510
‑
整形摆臂;
52.60
‑
料带轨道机构,600
‑
料带,6001
‑
料带主体,6002
‑
引脚,6003
‑
定位孔,601
‑
导料立板,602
‑
第一导料轮,603
‑
导料压轮,604
‑
压轮摆臂,605
‑
进料感应器,606
‑
第二导料轮,607
‑
料带轨道托板,608
‑
轨道调节块,609
‑
出带轮,610
‑
收带盘组件;
53.70
‑
料带定位移送机构,701
‑
料带移送支架,702
‑
料带移送滑杆,703
‑
料带移送滑座,704
‑
移送针竖直滑座,705
‑
移送针竖直滑杆,706
‑
移送针连接头,707
‑
移送针,708
‑
移送导板,709
‑
移送针竖直摇臂,710
‑
弹性连杆,711
‑
料带移送摆臂,712
‑
移送限位杆;713
‑
定位针滑座,714
‑
定位针竖直滑杆,715
‑
定位针安装块,716
‑
定位针,717
‑
定位针摆臂,718
‑
定位针限位杆,719
‑
定位导板,720
‑
定位针竖直摆臂,721
‑
校正夹持座,722
‑
校正夹持盖板,723
‑
校正夹持传动杆,724
‑
竖直拨动块,725
‑
校正推杆,726
‑
校正铰接座,727
‑
校正夹持爪,728
‑
暂存夹持滑座,729
‑
暂存夹持推杆,730
‑
暂存夹持爪;
54.80
‑
自动送带机构,800
‑
带材,801
‑
送带安装块,802
‑
滚轮座,803
‑
第一滚轮轴,804
‑
第一送带滚轮,805
‑
第一齿轮,806
‑
止转臂,807
‑
摇臂,808
‑
滚轮滑块,809
‑
第二滚轮轴,810
‑
第二送带滚轮,811
‑
第二齿轮,812
‑
滚轮滑块连接板,813
‑
滚轮压紧弹簧,814
‑
入料导块,815
‑
出料导块,816
‑
压力调节螺钉,817
‑
压紧限位螺钉,818
‑
轴套,819
‑
止动夹块,820
‑
送带顶板,821
‑
送带摆臂,822
‑
送带连杆组件,823
‑
送带摆臂铰接座;
55.90
‑
冲压机构,901
‑
支撑架,902
‑
模架底板,903
‑
导柱,904
‑
模架弹簧,905
‑
导套,906
‑
模架板,907
‑
下模连接板,908
‑
下模板,909
‑
料带限位滑杆,910
‑
限位滑杆块,911
‑
料带限位块,912
‑
料带限位臂,913
‑
料带压块,914
‑
料带压块导柱,915
‑
料带压紧弹簧,916
‑
上模块,917
‑
冲切块组件,918
‑
冲切承块组件,919
‑
滑杆连接块,920
‑
冲压摆臂,921
‑
冲压摆臂座,922
‑
冲压摆臂调节块;
56.100
‑
激光焊接机构,1001
‑
激光升降滑座,1002
‑
激光升降手柄,1003
‑
激光发射器,1004
‑
激光头;
57.110
‑
控制器,1101
‑
控制器支架,1102
‑
显示屏,1103
‑
控制按键,1104
‑
指示灯;
58.300
‑
切线工位,400
‑
整形工位,500
‑
焊接工位。
具体实施方式
59.下面结合附图对本发明的具体实施方式作进一步说明。在此需要说明的是,对于这些实施方式的说明用于帮助理解本发明,但并不构成对本发明的限定。此外,下面所描述的本发明各个实施方式中所涉及的技术特征只要彼此之间未构成冲突就可以相互组合。
60.实施例1
61.如图1
‑
11所示,本发明实施例提供了一种无感电阻芯片冲压焊接一体机,包括机架动力机构10、设置在所述机架动力机构10的台面板102上的自动送带机构80、冲压机构90、自动送线机构20、切线机构30、引脚移送机构40、引脚整形机构50、料带轨道机构60、料带定位移送机构70以及激光焊接机构100,所述台面板102设置在一机架101上,所述机架101内设置有驱动电机103以及与所述驱动电机103连接的动力轴,所述动力轴对应所述自动送带机构80、所述冲压机构90、所述自动送线机构20、所述切线机构30、所述引脚移送机
构40、所述引脚整形机构50、所述料带轨道机构60和所述料带定位移送机构70设置有送带凸轮114、冲压凸轮113、切线凸轮110、整形凸轮111、夹线夹张闭凸轮112、引脚移送凸轮109、料带移送凸轮115、移送针凸轮116、定位针凸轮117和定位滑杆凸轮118;通过设置凸轮参数,使得带材800通过所述自动送带机构80进入到所述冲压机构90形成料带主体6001进入到所述料带轨道机构60和所述料带定位移送机构70;线材200通过所述自动送线机构20进入到所述切线机构30剪切形成引脚6002,所述引脚6002通过所述引脚移送机构40和所述引脚整形机构50进行整形后夹持定位移送到所述料带轨道机构60上焊接工位,所述激光焊接机构100在所述焊接工位500将所述引脚6002焊接在所述料带主体6001形成无感电阻芯片料带600。具体的,所述动力轴包括主动轴105和从动轴108,所述主动轴105和所述从动轴108通过若干轴安装座127并排设置在所述台面板102下方,所述驱动电机103通过一电机座板122设置在所述机架101内,所述驱动电机103通过皮带104与所述主动轴105连接,所述主动轴105一端通过齿轮组107驱动所述从动轴108;所述主动轴105上设置有所述引脚移送凸轮109、所述切线凸轮110、所述整形凸轮111、所述夹线夹张闭凸轮112和所述定位针凸轮117,所述从动轴108上设置有所述送带凸轮114、所述冲压凸轮113、所述料带移送凸轮115、所述移送针凸轮116以及所述定位滑杆凸轮118。
62.本发明的无感电阻芯片冲压焊接一体机,通过设置自动送带机构80和冲压机构90以及设置送带凸轮114和冲压凸轮113的轮廓曲线等参数使得带材能够自动化地通过送带滚轮向冲压机构90的冲切导槽移送,带材800依次通过冲切导槽内的冲切块组件917和冲切承块组件918,在送带凸轮114和冲压凸轮113作用下间歇性地通过冲切导槽,并完成冲切工序,本案中还采用驱动电机103来驱动动力轴的工作,进而带动各凸轮的同步工作,这样能够简化装置内部驱动部件的布设,优化设备空间,同时采用一个动力源驱动较多部件工作,能够较佳的节省生产能耗。同时本案为保证焊接质量,在焊接前进行整形定位以保证焊接精准性。
63.如图9所示,所述主动轴105上设置有若干编码盘119,对应每一所述编码盘119设置有光电门120,所述光电门120通过一光电门安装板121设置在所述主动轴102一侧。
64.可选的,所述主动轴105的其中一端设置有手轮106。
65.可选的,所述机架101内还设置有防护罩板123,所述驱动电机103设置在所述电机座板122和所述防护罩板123之间,防护罩板123的设计用于防止人员误触造成人员人体受伤,同时也避免外部杂物进入到机架101内造成驱动电机103的损坏或无法使用。
66.可选的,所述机架101内还设置有电源驱动组件124,所述电源驱动组件124与驱动电机103、光电门120、送线马达208连接,用于保证电力输入以及各部件的正常运转。
67.可选的,所述机架101底部设置有可调支撑脚125和万向轮126,可调支撑脚125的设计用于控制装置水平高度升降,如离地面距离控制,可适用于各场合下的装配,且在装置安装到生产线后,可调通过调节可调支撑脚125使万向轮126离地,这样能够提高装置安装稳定性,避免在突发情况下装置受到撞击产生较大位移。而在需要装置移动时,调节可调支撑脚125高度,使用万向轮126移动装置即可,保证其移动灵活性。
68.如图6、7所示,所述自动送线机构20包括送线支架201、设置在所述送线支架201上的送线座板206,所述送线座板206上设置有送线轮209以及围绕所述送线轮209设置的若干压线轮组件210,对应所述送线轮209在所述送线座板209下侧设置有送线马达208;所述送
线座板206一侧设置有送线管202,线材200从所述送线管202进入到所述送线轮209和所述压线轮组件210之间;所述送线支架201另一侧还设置有送线连接板212,所述线材200穿设所述送线连接板212到达切线工位300。自动送线机构20的设计用于实现对线材200的自动化传送,替代人工手动传送,且在传送过程中采用压线组件210进行压线,保证线材传送过程处于较为平稳状态,相较于人工或其他方案而言,本案解决了传送不平稳的问题,特别是避免了传送过程中线材200可能出现的偏移或相对折弯问题出现,且有效保证了线材200能够较为快速且精准的到达切线工位300。
69.可选的,所述送线管202通过一线管夹板203固定在所述送线座板206一侧,所述线管夹板203(如图11所示)靠近所述送线座板206设置有若干导线轮204,线材200经所述送线管202、所述导线轮204进入到所述送线轮209。送线管202和导线轮202的设计方案能够对线材200传送路径进行限定,避免其在传送中产生不必要的弯折或与其他部件过度接触表面造成磨损。
70.可选的,在所述导线轮204一侧对应线材200设置有走线感应器205,用于实时测量走线长度,以便于计量统计以及避免断线。
71.可选的,所述导线轮204与所述压线轮组件210之间还设置有送线夹板207,线材200经所述送线夹板207后进入到所述压线轮组件210和所述送线轮209之间,夹线板207的设置用于线材传送过渡,同时,在传送的过程对于传送的线材200进行形状整形,消除线材200可能出现的弯折。
72.如图7所示,所述自动送线机构20还包括一送线调节轮211,所述送线轮209和所述压线轮组件210之间的线材200经所述送线调节轮211后进入到所述送线连接板212。送线调节轮211的设计用于调节张紧,避免加紧力过大或传送过程中对线材200张紧力过强导致线材200在传送过程中破损。
73.如图2、11所示,所述切线机构30包括切线滑座301,所述切线滑座301内设置有切线滑杆302,所述切线滑杆302下端与所述切线凸轮110配合,所述切线滑杆302上端设置有切线连接块303,所述切线连接块303上通过一管刀座304设置有管刀305,对应所述管刀305设置有相互配合的切刀307,所述切刀307通过一切刀固定块306安装在所述送线连接板212上。通过设定送线速度来控制线材200进行切断的长度,其中线材200以固定长度达到管刀305与切刀307之间切断形成引脚6002。
74.使用时,送线连接板212内的线材200穿过管刀座304后穿出管刀305,切刀307与管刀305的轴线相互垂直,切刀307固定在管刀305出口端,切线凸轮106通过切线滑杆305带动管刀305相对切刀307相互垂直移动,通过控制送线马达208、切线凸轮106参数可以实现预定长度线材的切断,从而得到引脚6002,在切割过程中切线凸轮106通过切线滑杆305带动管刀305相对切刀307相互垂直移动对线材200进行切割,这样能够快速对线材200进行切割且减小毛刺的出现。
75.如图2、4、9、12所示,所述引脚移送机构40包括引脚移送支架401,通过若干引脚移送滑杆402在所述引脚移送支架401内设置有引脚移送滑座403,所述引脚移送滑座403上连接设置有引脚夹持座411,所述引脚夹持座411内设置有若干由上夹组件408和下夹组件410形成的引脚夹持部,所述引脚夹持部用于夹持线材200切断形成的引脚6002;所述引脚移送滑座403一端铰接设置有引脚移送连杆404,所述引脚移送连杆404通过一引脚移送摆臂405
与所述引脚移送凸轮109连接。可选的,所述引脚移送摆臂405通过一移送摆臂安装座406设置在所述台面板102下方。
76.具体的,所述上夹组件408通过一上夹滑块407设置在所述引脚夹持座411,所述下夹组件410通过一下夹滑块409设置在所述引脚夹持座411,所述上夹滑块407和所述下夹滑块409贴合设置,所述上夹滑块407和所述下夹滑块409贴合处设置有开夹齿条部415,对应所述开夹齿条部415在所述上夹滑块407和所述下夹滑块409之间设置有开夹齿轮416。
77.可选的,所述开夹齿轮416通过一开夹齿轮座417设置在所述上夹滑块407和所述下夹滑块409一侧;使用时,上夹滑块407与下夹滑块409在开夹齿轮416上相对滑动,使得上夹组件408和下夹组件410之间形成开合动作。
78.如图9所示,所述台面板102下侧对应所述引脚夹持座411设置有开夹固定块414,所述开夹固定块414设置有开夹作用滑轨419,所述开夹作用滑轨419对应所述下夹滑块409的下端设置有开夹作用块413,所述开夹作用块413通过开闭摆臂412与夹线夹张闭凸轮112连接。
79.可选的,所述台面板102下侧还设置有引脚夹开闭座420,所述开闭摆臂412转动设置在所述引脚夹开闭座420内,所述开闭摆臂412一端连接所述夹线夹张闭凸轮112,另一端驱动所述开夹作用块413。
80.可选的,对应所述引脚夹持座411设置有夹持座盖板418,所述上夹滑块409和所述下夹滑块407设置在所述引脚夹持座411和所述夹持座盖板418之间。
81.如图5、8、13所示,所述引脚整形机构50包括整形滑座501、整形滑杆502、设置在所述整形滑座501上端的整形滑块504,所述整形滑杆502下端通过一整形滑板503与所述整形凸轮111连接,驱动所述整形滑块504;在所述整形滑块504上设置有整形压块505,对应所述整形压块505下方设置有整形座板506,所述引脚移送机构40将切线工位300的引脚6002移送到所述整形压块505和所述整形座板506之间的整形工位400,进行整形,使所获得的引起6002形状符合焊接要求以及加工形状,在整形的过程中能够将引脚6002在切割中可能产生的毛刺进行消除提高引脚6002加工质量,同时引脚6002与各整形部件的接触能够使其与各部件接触面积扩大,有利于将引脚6002在切割过程中可能残留的热量传递散发,保证后续焊接质量。
82.可选的,所述台面板102下侧设置有整形开合座509、整形摆臂510,所述整形滑杆502通过一铰接拉杆508与所述整形摆臂510中部连接,所述整形摆臂510一端与所述整形凸轮111连接,另一端铰接到所述整形开合座509。
83.可选的,对应所述整形工位400设置有整形承板507,所述整形承板507贴合所述整形座板506,所述整形承板507用于支撑引脚夹持部上的引脚6002。
84.如图3、16、17所示,所述冲压机构90包括一设置在所述台面板102上的支撑架901,所述支撑架901上端设置有模架底板902,所述模架底板902上设置有若干导柱903,所述导柱903上端设置有模架板906,所述模架板906下端通过若干料带压块导柱914设置有上模块916;所述模架底板902上通过一下模连接板907设置有下模板908,所述上模块916与所述下模板908相对设置冲切块组件917和冲切承块组件918,带材800依次通过所述冲切块组件917和所述冲切承块组件918之间。通过冲切的方式对带材快速切割相较于普通切割而言带材切割所产生毛刺的几率能够得到降低,同时对于冲切的带材依次通过所述冲切块组件
917和所述冲切承块组件918之间能够保持稳定的冲切工序,即冲切的一致性得到有效保证,避免冲切误差出现。
85.可选的,所述导柱903上依次套设有模架弹簧904以及导套905,所述模架板906通过所述导套905设置在所述导柱903上端,提供冲切缓冲,以降低或避免冲切后冲切部件回弹对冲切的带材可能出现的二次切割造成质量降低,保证了冲切部件的上下移动符合控制要求。
86.其中,所述上模块916设置在一料带压块913上,所述冲切块组件917穿设所述料带压块913与所述下模板908上的冲切承块组件918相互配合,所述料带压块913通过所述料带压块导柱914连接到所述模架板906下端,所述料带压块913与所述模架板906之间还设置有料带压紧弹簧915。料带压块913的设计用于对冲切的带材起到压紧作用,特别是对于冲切位置点附近带材压紧,这样能够保证冲切过程中带材无偏移以及冲切质量,同时在对带材压紧的同时有利于冲切所产生的冲击力以及热量能够从带材上传递至料带压块913来降低冲切对其质量影响。
87.具体的,所述冲切承块组件918设置在所述下模板908上的冲切导槽内,对应所述冲切导槽在所述下模板908一侧设置有料带限位块911,所述料带限位块911固定在一限位滑杆块910上;所述下模连接板907内设置有若干料带限位滑杆909,所述料带限位滑杆909一端固定在一滑杆连接块919,另一端安装所述限位滑杆块910,对应所述限位滑杆块910在所述模架板906上设置有料带限位臂912。上述料带限位块911和限位滑竿910等部件的设计用于对冲切过程中带材停止冲切位置进行限位,保证每次冲切位置精准。
88.如图3所示,所述台面板102上设置有冲压摆臂座921,所述冲压摆臂座921内铰接设置有冲压摆臂920,所述冲压摆臂920一端与所述冲压凸轮113连接,另一端通过一冲压摆臂调节块922作用到所述模架板906上端,驱动所述上模块916与下模板908合模冲切。
89.如图3、9、15所示,所述自动送带机构80包括送带安装块801和滚轮座802,所述送带安装块801将所述滚轮座802设置在所述台面板102或者支撑架901一侧,所述滚轮座802内通过第一滚轮轴803和第二滚轮轴809分别安装有第一送带滚轮804和第二送带滚轮810,所述第一滚轮轴803和所述第二滚轮轴809一端分别设置有相互配合的第一齿轮805和第二齿轮811,所述第一滚轮轴803或者所述第二滚轮轴809的其中一端通过一送带摆臂821与所述送带凸轮114连接;带材800通过所述第一送带滚轮804和所述第二送带滚轮810之间进入到所述冲压机构90。用于实现将带材800传送至冲压机构90,避免带材800在装置上传送路径中与其他部件发生接触产生不必要的摩擦破损,同时对带材800起到有效的整形作用,消除带材800表面不平整部分。
90.如图5、8所示,所述送带摆臂821通过一送带摆臂铰接座823安装在所述台面板102,所述送带摆臂821一端与所述送带凸轮114连接,另一端通过送带连杆组件822驱动所述送带摆臂821,所述送带摆臂821与所述第一滚轮轴803或者所述第二滚轮轴809的其中一端连接。
91.可选的,所述送带摆臂821通过轴套818与一止动臂806连接,所述止动臂806上通过轴套818设置有止动夹块819,所述止动夹块819一端固定在所述滚轮座802一侧。
92.其中,所述滚轮座802上端设置有送带顶板820,所述第二滚轮轴809两端通过滚轮滑块808安装在所述滚轮座802,所述滚轮滑块808上端通过一滚轮滑块连接板812固定,所
述滚轮座802与所述滚轮滑块连接板812之间设置有若干压力调节螺钉816,在所述压力调节螺钉816上套设有滚轮压紧弹簧813,通过调节压力调节螺钉816以及滚轮压紧弹簧813的配合来实现对带材800的传送压紧压力进行调节,防止压紧力过大造成传送速度过慢且对带材800造成过量挤压形变,也避免了压紧力过松造成在传送过程中带材800偏移。
93.可选的,所述送带顶板820与所述滚轮滑块连接板812之间还设置有压紧限位螺钉817。具体的,所述滚轮座802相对的两侧分别设置有入料导块814、出料导块815,带材800穿设所述入料导块814后进入到所述第一送带滚轮804和所述第二送带滚轮810之间,穿设所述出料导块815后进入所述冲压机构90。出入料导块的设计用于对带材800的进入和送出起到较好的导向作用。
94.使用时,带材800通过自动放卷等装置,从入料导块814进入到第一送带滚轮804和第二送带滚轮810之间,由于送带凸轮114驱动第一送带滚轮804和第二送带滚轮810间歇性转动,使得带材800向出料导块815移动,出料导块815对应上模块916、下模板908之间的冲切导槽,带材800进入到冲切导槽后,冲压凸轮113通过冲压摆臂920作用在模架板906,模架板906带动上模块916下降,使得冲切块组件917和冲切承块组件918合模,对带材800进行冲切,同时,料带限位臂912随着模架板906下降,使得料带限位块911将带材800限制在冲切导槽内,配合完成冲切动作;之后,模架板306在模架弹簧304作用下复位,接着送带凸轮114进行下一个送带动作,接着冲压凸轮113进行再一次冲切动作,如图18所示,依次在冲切导槽内完成1、2、3、4、5、6、7这几个冲切槽或者孔,形成无感电阻芯片料带主体6001。
95.如图8
‑
11所示,所述台面板102上还设置有料带轨道机构60,包括导料立板601以及料带轨道托板607,所述导料立板601设置在料带移送支架701,所述料带轨道托板607设置在所述导料立板601下方,所述引脚整形机构50设置在所述料带轨道托板607的前端,在所述导料立板601上设置有若干导料轮,料带600依次通过所述导料轮进入到水平设置的所述料带轨道托板607,随着料带600移送方向对应所述料带轨道托板607设置有料带定位移送机构70,所述料带定位移送机构70包括所述料带移送支架701、通过若干料带移送滑杆702设置在所述料带移送支架701内的料带移送滑座703、定位针滑座713,所述料带移送滑座703上设置有移送针竖直滑座704,所述移送针竖直滑座704设置有移送针竖直滑杆705,所述移送针竖直滑杆705通过一移送针连接头706安装有移送针707(如图4所示),所述移送针707穿设料带轨道托板607;所述定位针滑座713内设置有定位针竖直滑杆714,所述定位针竖直滑杆714穿设料带轨道托板607,在所述定位针竖直滑杆714的顶端通过一定位针安装块715设置有若干定位针716,所述定位针716对应所述料带轨道托板607上的焊接工位500设置,将料带主体6001定位在所述焊接工位500。
96.如图10、11所示,所述导料轮包括第一导料轮602、第二导料轮606,所述第一导料轮602和所述第二导料轮606依次竖直安装在所述导料立板601上,所述料带轨道托板607的一端设置在所述第二导轨轮606下方,所述料带轨道托板607的另一端设置有出带轮609,在所述台面板102一侧设置有收带盘组件610,料带600经所述出带轮609后进入所述收带盘组件610收卷包装,第一导料轮602、第二导料轮606的设计用于对料带600传导,通过滚动传递方式降低了传送对料带600的摩擦损伤,且相较于其他传送方式能够较好的保证传送速度损失率。
97.可选的,对应所述第一导料轮602设置有导料压轮603,所述导料压轮603通过一压
轮摆臂604设置在所述导料立板601。
98.可选的,在所述第一导料轮602和所述第二导料轮606之间设置有进料感应器605,用于实现进料感应以便于控制后续部件工作,同时能够通过进料感应器605来判断是否停止后续部件工作来起到节能效果。
99.可选的,所述料带轨道托板607上设置有轨道调节块608,用于根据料带600规格调整轨道宽度。
100.其中,所述料带移送滑座703通过一弹性连杆710,所述弹性连杆710通过一料带移送摆臂711与所述料带移送凸轮115连接。
101.其中,所述移送针竖直滑杆705的下端设置有移送针竖直摇臂709,所述移送针竖直摇臂709与所述移送针凸轮116连接,所述移送针凸轮116用于驱动所述移送针707竖直周期性往复移动。
102.可选的,对应所述移送针707设置有移送导板708,料带600通过所述料带轨道托板607与所述移送导板708之间,用于实现对料带600的移送。
103.可选的,所述料带移送支架701对应所述料带移送滑座703一端设置有移送限位杆712。
104.其中,所述定位针滑座713一端设置有定位针摆臂717,所述定位针摆臂717与所述定位针凸轮117连接,所述定位针凸轮117驱动所述定位针滑座713在料带移送滑杆702上间歇性往复移动。
105.可选的,对应所述定位针滑座713一端在所述定位针摆臂717上设置有定位针限位杆718。
106.可选的,对应所述定位针716设置有定位导板719,所述定位导板719设置在移送导板708前端的所述料带轨道托板607上,料带600从第二导料轮606后进入到所述定位导板719和所述料带轨道托板607之间。
107.具体的,所述引脚移送滑座403与所述料带轨道托板607之间的台面板102上设置有校正夹持座721,如图14所示,所述校正夹持座721上端对应所述整形工位400和所述焊接工位500分别设置有校正夹持爪727和暂存夹持爪730;所述校正夹持座721内设置有校正夹持传动杆723,所述校正夹持传动杆723下端与所述定位滑杆凸轮118连接,所述定位针竖直滑杆714下端设置有定位针竖直摆臂720,所述定位针竖直摆臂720一端通过竖直拨动块724连接到所述校正夹持传动杆723;所述校正夹持座721内所述校正夹持传动杆723通过一校正推杆725驱动一组所述校正夹持爪727分别在校正铰接座726上开合;所述校正夹持传动杆723通过所述竖直拨动块724驱动一暂存夹持推杆729在暂存夹持滑座728上移动,所述暂存夹持推杆729上端设置所述暂存夹持爪730。
108.可选的,校正夹持座721设置有校正夹持盖板722,所述校正夹持传动杆723设置在所述校正夹持座721和所述校正夹持盖板722内。
109.使用时,冲切机构90形成无感电阻芯片料带主体6001一侧设置有均匀的定位孔6003;料带主体6001通过第一导料轮605、第二导料轮608,随着驱动电机103带动主动轴105和从动轴108转动,定位针凸轮117驱动定位针滑座713到达设置位置,定位针滑杆凸轮118驱动定位针竖直滑杆714上下移动,使得定位针716穿过定位导板719与料带600的定位孔6003对应配合,实现料带600传送的定位;引脚移送凸轮109驱动引脚移送滑座403到达初始
位置,使得其中一组引脚夹持部对应切线工位300,切线凸轮110驱动管刀305移动与切刀307配合将线材200切断形成引脚6002,夹线夹张闭凸轮112驱动上夹组件408和下夹组件410开合,将引脚夹持在第一个引脚夹持部;接着引脚移送凸轮109继续工作使得引脚移送滑座403沿着传送方向移动,使得第一个引脚夹持部对应到达整形工位400,整形凸轮111驱动整形压块505将引脚6002一端压平整形,同时切线工位300同步切线工序,夹线夹张闭凸轮112再次工作进行引脚夹持部开合,定位针凸轮117通过校正夹持传动杆723驱动校正夹持爪727开合,整形后的引脚6002通过校正夹持爪727进行整形校正;引脚移送凸轮109驱动引脚移送滑座403复位,使得第一引脚夹持部夹取新的引脚6002,第二引脚夹持部对应夹持整形后的引脚6002,引脚移送凸109驱动引脚移送滑座403将第一引脚夹持部对应整形工位400,第二引脚夹持部将整形后的引脚6002移送到暂存夹持爪730暂存;引脚移送滑座403复位,第一引脚夹持部从切线工位300获取新的引脚6002,第二引脚夹持部获取整形工位400的引脚6002,第三引脚夹持部抓取暂存夹持爪730上的引脚6002,引脚移送滑座403移动将第三夹持部的引脚6002移送到焊接工位500,料带主体6001进入到定位导板719和料带轨道托板609之间,焊接工位500设置在定位导板719上,料带主体6002与引脚6002进行通过激光头进行焊接结合,第一夹持部、第二夹持部、第三夹持部依次间隙进行,完全切线、整形、焊接工序。如图1所示,所述激光焊接机构100包括设置在所述台面板102上的激光升降滑座1001、激光发射器1003以及激光头1004,所述激光发射器1003可升降地设置在所述激光升降滑座1001上,所述激光发射器1003驱动所述激光头1004,所述激光头1004对应所述焊接工位500设置。
110.可选的,所述激光升降滑座1001上端设置有激光升降手柄1002,所述激光升降手柄1002用于调整所述激光发射器1003的竖直高度。如图1所示,所述无感电阻芯片冲压焊接一体机还包括控制器110,所述控制器110通过一控制器支架1101安装在所述台面板102,所述控制器110上设置有显示屏1102、控制按键1103以及指示灯1104。
111.本发明的无感电阻芯片冲压焊接一体机,通过设置自动送带机构和冲压机构,设置送带凸轮和冲压凸轮的轮廓曲线等参数使得带材能够自动化地通过送带滚轮向冲压机构的冲切导槽移送,带材依次通过冲切导槽内的冲切块组件和冲切承块组件,在送带凸轮和冲压凸轮作用下间歇性地通过冲切导槽,并完成冲切工序,形成料带主体;同时,通过切线凸轮、整形凸轮、定位滑杆凸轮、夹线夹张闭凸轮、定位针凸轮、引脚移送凸轮结合送线马达,使得线材以固定长度达到管刀与切刀之间切断形成引脚,设置切线凸轮、整形凸轮、定位滑杆凸轮、夹线夹张闭凸轮、定位针凸轮、引脚移送凸轮的轮廓曲线等参数使得引脚以间歇性稳定地从切线工位依次移送到整形工位、焊接工位;料带主体通过定位针凸轮、料带移送凸轮、移送针凸轮和定位滑杆凸轮驱动定位针、移送针沿着传送方向平行以及垂直两个方向往复间歇性移动,通过设置定位针凸轮、料带移送凸轮、移送针凸轮和定位滑杆凸轮的轮廓曲线等参数,使得料带主体在移送过程中采用移送针周期性地拨动移送双节距,通过焊接工位进行定位并利用激光将引脚焊接在料带主体,形成无感电阻芯片料带,自动化运行,结构紧凑,稳定性好。
112.以上结合附图对本发明的实施方式作了详细说明,但本发明不限于所描述的实施方式。对于本领域的技术人员而言,在不脱离本发明原理和精神的情况下,对这些实施方式进行多种变化、修改、替换和变型,仍落入本发明的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1