一种扫地机器人全自动装配设备的制作方法
1.本发明涉及智能制造设备领域,尤其涉及到一种扫地机器人全自动装配设备。
背景技术:
2.扫地机器人是近几年市场比较火爆的产品,扫地机器人结果构复杂,组装工序较多,因此人工操作工序较多,现有的扫地机器人生产线工位结构不合理,自动化程度低,生产效率低,产品质量不能得到有效保证。
3.因此,现有技术存在缺陷,需要改进。
技术实现要素:
4.为了解决现有人工操作工序较多,工位结构不合理,自动化程度低,生产效率低等缺陷,本发明提供了一种扫地机器人全自动装配设备。
5.本发明提供的技术文案,包括装配柜体,所述装配柜体包括装配底柜、上柜体和上柜体底板,所述上柜体底板上设置有转盘机构,所述转盘机构固定于所述上柜体底板的左前方,所述转盘机构的后面设置有料塔机构,所述料塔机构固定于所述上柜体底板的左后方,所述转盘机构和所述料塔机构的中间设置有第一四轴机械臂,所述第一四轴机械臂固定于所述上柜体底板的中间,所述第一四轴机械臂的前方右侧设置有工业运动相机组件,所述工业运动相机组件固定于所述上柜体底板的右前方,所述工业运动相机组件的右前方固定有pcb注油组件,所述料塔机构的右侧设置有油泵组件,所述油泵组件固定于所述上柜体底板的右后方。
6.优选地,所述上柜体底板固定于所述装配底柜的上部,所述上柜体固定于所述上柜体底板的上部;所述上柜体包括上柜体支撑架、有机玻璃、紧急停止启动台、安全光栅、安全门、门吸、安全门开关和设备控制盒,所述上柜体支撑架固定于所述上柜体底板的上面,所述有机玻璃固定于所述上柜体支撑架的外面,所述紧急停止启动台固定于所述上柜体支撑架的前方下部,所述安全光栅固定于所述上柜体支撑架的前面两侧,所述安全门固定于所述上柜体支撑架的后面,所述门吸和所述安全门开关固定于所述安全门的上部,所述设备控制盒固定于所述上柜体支撑架的前面。
7.为了固定转盘机构、料塔机构、第一四轴机械臂、工业运动相机组件、油泵组件和pcb注油组件,在装配底柜的上部设置有上柜体底板;在上柜体支撑架上固定有机玻璃,可以清晰的观察设备运行状态;在上柜体支撑架的前方下部设置紧急停止启动台,可以用来对设备进行停止和启动操作,安全光栅配合紧急停止启动台使用,可以有效保证操作安全;为了方便对设备的维护和注油操作,在上柜体支撑架的后面装配安全门,为了保证通过安全门进行作业时的安全,在安全门的上方设置了门吸和安全门开关,当设备运行的时候,安全门开关始终处于锁闭状态;设备控制盒用来显示和控制设备的整体运行状况。
8.优选地,所述转盘机构包括转盘、转盘电机组件、翻盖底板、扫码光源组件、螺钉导向机构、第一定位装配台、第二定位装配台、激光传感器和金手指夹爪缸,所述转盘固定于
所述上柜体底板的上面,所述转盘电机组件设置于所述转盘的下面,所述转盘电机组件固定于所述装配底柜的内部,所述翻盖底板固定于所述转盘的上面,所述扫码光源组件固定于所述翻盖底板的上部,所述螺钉导向机构设置于所述第一定位装配台的上面,所述翻盖底板的一侧固定有所述第一定位装配台,所述翻盖底板的另一侧固定有所述第二定位装配台,所述激光传感器设置于所述第一定位装配台的侧面,所述激光传感器固定于所述转盘的侧面,所述金手指夹爪缸设置于所述第二定位装配台的上部。
9.为了便于对扫地机器人的金手指落料,pcb喷油,下盖打螺钉等操作,在上柜体底板上设置有转盘机构;转盘电机组件带动转盘的转动,扫码光源组件用来扫描大壳体组件、pcb和驱动滑块的二维码,以便装配前的确认;螺钉导向机构帮助定位打螺钉操作,第一定位装配台和第二定位装配台用来准确固定扫地机器人各装配零部件,激光传感器用来测量并将结果传送至控制盒,金手指夹爪缸用来配合第一四轴机械臂进行抓取和注油等操作。
10.优选地,所述螺钉导向机构包括导向底板,所述导向底板的上面固定有双作用短行程气缸,所述双作用短行程气缸的上面设置有轴承单元,所述导向底板的四周各设置有一个导向轴,所述导向轴和所述轴承单元的上面设置有导向座,所述导向座的左边上部连接有左螺钉导向板,所述导向座的右边上部连接有右螺钉导向板,所述左螺钉导向板和所述右螺钉导向板的中间设置有导向板连接单元,所述导向板连接单元的左侧连接所述左螺钉导向板,所述导向板连接单元的右侧连接所述右螺钉导向板。
11.为了更好的对扫地机器人进行拧螺丝操作,在转盘机构上设置螺钉导向机构,双作用短行程气缸为轴承单元提供旋转动力,导向轴用来固定导向座,导向座放置左螺钉导向板和右螺钉导向板,左螺钉导向板和右螺钉导向板配合轴承单元对螺丝进行定位。
12.优选地,所述金手指夹爪缸包括连接法兰、夹爪安装板、气动夹爪、磁性开关、中间顶料过渡板、爪片、夹爪中间导向套、顶针、喷雾阀安装板和喷雾阀,所述连接法兰连接所述第一四轴机械臂,所述夹爪安装板连接所述连接法兰的底部,所述气动夹爪连接所述夹爪安装板的两侧,所述磁性开关设置于所述气动夹爪的中间,所述中间顶料过渡板连接所述气动夹爪的前面,所述爪片固定于所述气动夹爪的下面,所述夹爪中间导向套设置于所述爪片的中间,所述夹爪中间导向套连接所述中间顶料过渡板的下方,所述顶针连接所述夹爪中间导向套的下方,所述喷雾阀安装板连接所述夹爪安装板的后方,所述喷雾阀连接所述喷雾阀安装板。
13.为了配合第一四轴机械臂进行抓取和注油等操作,在转盘机构2上设置金手指夹爪缸,连接法兰用来连接第一四轴机械臂和金手指夹爪缸,夹爪安装板用来固定气动夹爪,气动夹爪用来抓取和放置金手指等操作,磁性开关用来控制气动夹爪的夹取和张开,中间顶料过渡板顶取金手指配件,爪片配合夹爪中间导向套和顶针对夹取的金手指配件进行放置,喷雾阀安装板用来固定喷雾阀,喷雾阀用来给pcb进行注油操作。
14.优选地,所述料塔机构包括第一大金手指料塔、第二大金手指料塔和小金手指料塔,所述第一大金手指料塔固定于所述上柜体底板的上面,所述第二大金手指料塔固定于所述第一大金手指料塔的左侧,所述小金手指料塔固定于所述第二大金手指料塔的左侧。
15.为了给扫地机器人装配进行供料,在上柜体底板的上面固定有料塔机构,第一大金手指料塔和第二大金手指料塔对大金手指配件进行供料,小金手指料塔对小金手指配件进行供料。
16.优选地,所述第一大金手指料塔包括料塔支架,所述料塔支架的中间设置有分度盘,所述分度盘的下面设置有料管分度盘,所述分度盘和所述料管分度盘的中间设置有支撑轴,所述支撑轴穿过所述分度盘和所述料管分度盘,且所述支撑轴固定于所述料塔支架的上面,所述料塔支架的后面固定有分度盘气缸支架,所述分度盘气缸支架的前面固定有分度盘气缸,所述料管分度盘的下面设置有导料槽,所述导料槽的前端设置有分料单元,所述分料单元固定于所述料塔支架的前端,所述分料单元的右侧固定有分料气缸。
17.为了给扫地机器人装配进行大金手指的供料,在上柜体底板的上面固定有第一大金手指料塔,分度盘配合料管分度盘对大金手指进行落料操作,支撑轴支撑分度盘和料管分度盘的转动,分度盘气缸支架用来固定分度盘气缸,分度盘气缸给分度盘的转动提供动力支撑,导料槽用来放置大金手指,分料气缸配合分料单元对大金手指进行分料操作。
18.优选地,所述工业运动相机组件的前面设置有运动相机显示器,所述运动相机显示器固定于所述上柜体的内顶部。
19.工业运动相机组件拍照确认,曲面块、pcb、驱动滑块变种是否正确,运动相机显示器用来显示及存储工业运动相机的照片,配合工业运动相机检测及记录。
20.优选地,所述装配柜体的前面设置有第二四轴机械臂,所述第二四轴机械臂的两侧各设置一个手柄滑道,所述手柄滑道的前面设置有配件放置架。
21.为了替代人工对配件的放置,在装配柜体的前面设置有第二四轴机械臂,为了方便第二四轴机械臂对扫地机器人的放置和抓取,在第二四轴机械臂的两侧各设置一个手柄滑道,为了方便放置各个零部件,在手柄滑道的前面设置有配件放置架。
22.相对于现有技术的有益效果是,本发明工位配置结构合理,自动化程度高,生产效率高,提高产品质量,具有良好的市场应用价值。
附图说明
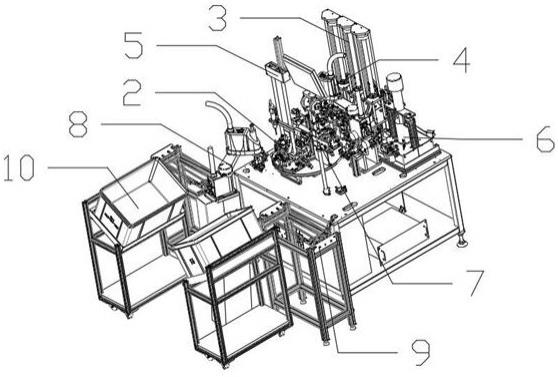
23.图1为本发明的一种扫地机器人全自动装配设备整体结构示意图;图2为本发明的一种扫地机器人全自动装配设备左侧示意图;图3为本发明的一种扫地机器人全自动装配设备右侧示意图;图4为本发明的装配柜体结构示意图;图5为本发明的上柜体一结构示意图;图6为本发明的转盘机构结构示意图;图7为本发明的螺钉导向机构结构示意图;图8为本发明的金手指夹爪缸结构示意图;图9为本发明的料塔机构结构示意图;图10为本发明的第一大金手指料塔结构示意图;附图标记:1、装配柜体;11、装配底柜;12、上柜体;121、上柜体支撑架;122、有机玻璃;123、紧急停止启动台;124、安全光栅;125、安全门;126、门吸;127、安全门开关;128、设备控制盒;13、上柜体底板;2 、转盘机构;21、转盘;22、转盘电机组件;23、翻盖底板;24、扫码光源组件;25、螺钉导向机构;251、导向底板;252、双作用短行程气缸;253、轴承单元;254、导向轴;255、导向座;256、左螺钉导向板;257、右螺钉导向板;258、导向板连接单元;26、第一定位装配台;27、第二定位装配台;28、激光传感器;29、金手指夹爪缸;291、连接法
兰;292、夹爪安装板;293、气动夹爪;294、磁性开关;295、中间顶料过渡板;296、爪片;297、夹爪中间导向套;298、顶针;299、喷雾阀安装板、2910、喷雾阀;3、料塔机构;31、第一大金手指料塔;311、料塔支架;312、分度盘;313、料管分度盘;314、支撑轴;315、分度盘气缸支架;316、分度盘气缸;317、导料槽;318、分料单元;319、分料气缸;32、第二大金手指料塔;33、小金手指料塔;4、第一四轴机械臂;5、工业运动相机组件;51、运动相机显示器;6、油泵组件;7、pcb注油组件;8、第二四轴机械臂;9、手柄滑道;10、配件放置架。
具体实施方式
24.需要说明的是,上述各技术特征继续相互组合,形成未在上面列举的各种实施例,均视为本发明说明书记载的范围;并且,对本领域普通技术人员来说,可以根据上述说明加以改进或变换,而所有这些改进和变换都应属于本发明所附权利要求的保护范围。
25.为了便于理解本发明,下面结合附图和具体实施例,对本发明进行更详细的说明。附图中给出了本发明的较佳的实施例。但是,本发明可以以许多不同的形式来实现,并不限于本说明书所描述的实施例。相反地,提供这些实施例的目的是使对本发明的公开内容的理解更加透彻全面。
26.需要说明的是,当元件被称为“固定于”另一个元件,它可以直接在另一个元件上或者也可以存在居中的元件。当一个元件被认为是“连接”另一个元件,它可以是直接连接到另一个元件或者可能同时存在居中元件。本说明书所使用的术语“垂直的”、“水平的”、“左”、“右”以及类似的表述只是为了说明的目的。
27.除非另有定义,本说明书所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。本发明的说明书中所使用的术语只是为了描述具体的实施例的目的,不是用于限制本发明。
28.下面结合附图对本发明作详细说明。
29.实施例1:如图1、图2和图3所示,为了解决现有人工操作工序较多,工位结构不合理,自动化程度低,生产效率低等缺陷,本发明提供了一种扫地机器人全自动装配设备,包括装配柜体1,所述装配柜体1包括装配底柜11、上柜体12和上柜体底板13,所述上柜体底板13上设置有转盘机构2,所述转盘机构2固定于所述上柜体底板13的左前方,所述转盘机构2的后面设置有料塔机构3,所述料塔机构3固定于所述上柜体底板13的左后方,所述转盘机构2和所述料塔机构3的中间设置有第一四轴机械臂4,所述第一四轴机械臂4固定于所述上柜体底板13的中间,所述第一四轴机械臂4的前方右侧设置有工业运动相机组件5,所述工业运动相机组件5固定于所述上柜体底板13的右前方,所述工业运动相机组件5的右前方固定有pcb注油组件7,所述料塔机构3的右侧设置有油泵组件6,所述油泵组件6固定于所述上柜体底板13的右后方。
30.工业运动相机组件5拍照确认,曲面块、pcb、驱动滑块变种是否正确,转盘机构2转动180度,第一四轴机械臂4将料塔机构3的金手指放入转盘机构2上,扫描光源组件24扫描大壳体二维码,第一四轴机械臂4移至pcb上方,打开喷雾阀2910给pcb注油,转盘机构2转动180度,工业运动相机组件5拍照确认金手指装配无误;第二四轴机械臂8取大壳体组件将pcb装入大壳体,两侧软板插入pcb,工业运动相机组件5拍照确认软板是否插入到位,扫描光源组件24扫描pcb二维码;第一四轴机械臂4取下盖装入大壳体,转盘机构2进行螺钉装配
并检测到位,第二四轴机械臂8取出工件放入手柄滑道9中。
31.实施例2:如图4和图5所示,为了固定转盘机构2、料塔机构3、第一四轴机械臂4、工业运动相机组件5、油泵组件6和pcb注油组件7,在装配底柜11的上部设置有上柜体底板13;所述上柜体底板13固定于所述装配底柜11的上部,所述上柜体12固定于所述上柜体底板13的上部;所述上柜体12包括上柜体支撑架121、有机玻璃122、紧急停止启动台123、安全光栅124、安全门125、门吸126、安全门开关127和设备控制盒128,所述上柜体支撑架121固定于所述上柜体底板13的上面,所述有机玻璃122固定于所述上柜体支撑架121的外面,所述紧急停止启动台123固定于所述上柜体支撑架121的前方下部,所述安全光栅124固定于所述上柜体支撑架121的前面两侧,所述安全门125固定于所述上柜体支撑架121的后面,所述门吸126和所述安全门开关127固定于所述安全门125的上部,所述设备控制盒128固定于所述上柜体支撑架121的前面。
32.当进行人工作业时,安全光栅124检测并停止扫地机器人装配设备,作业完成后,按动紧急停止启动台123的启动按钮进行设备启动;需要进行注油操作时,设备停止工作,安全门开关127才会打开安全门125,操作完成,关闭安全门125,门吸126闭合安全门125。
33.在上柜体支撑架121上固定有机玻璃122,可以清晰的观察设备运行状态;在上柜体支撑架121的前方下部设置紧急停止启动台123,可以用来对设备进行停止和启动操作,安全光栅124配合紧急停止启动台123使用,可以有效保证操作安全;为了方便对设备的维护和注油操作,在上柜体支撑架121的后面装配安全门125,为了保证通过安全门125进行作业时的安全,在安全门125的上方设置了门吸126和安全门开关127,当设备运行的时候,安全门开关127始终处于锁闭状态;设备控制盒128用来显示和控制设备的整体运行状况。
34.实施例3:如图6所示,为了便于对扫地机器人的金手指落料,pcb喷油,下盖打螺钉等操作,在上柜体底板13上设置有转盘机构2,所述转盘机构2包括转盘21、转盘电机组件22、翻盖底板23、扫码光源组件24、螺钉导向机构25、第一定位装配台26、第二定位装配台27、激光传感器28和金手指夹爪缸29,所述转盘21固定于所述上柜体底板13的上面,所述转盘电机组件22设置于所述转盘21的下面,所述转盘电机组件22固定于所述装配底柜11的内部,所述翻盖底板23固定于所述转盘21的上面,所述扫码光源组件24固定于所述翻盖底板23的上部,所述螺钉导向机构25设置于所述第一定位装配台26的上面,所述翻盖底板23的一侧固定有所述第一定位装配台26,所述翻盖底板23的另一侧固定有所述第二定位装配台27,所述激光传感器28设置于所述第一定位装配台26的侧面,所述激光传感器28固定于所述转盘21的侧面,所述金手指夹爪缸29设置于所述第二定位装配台27的上部。
35.转盘电机组件22带动转盘21的转动,扫码光源组件24用来扫描大壳体组件、pcb和驱动滑块的二维码,以便装配前的确认;螺钉导向机构25帮助定位打螺钉操作,第一定位装配台26和第二定位装配台27用来准确固定扫地机器人各装配零部件,激光传感器28用来测量并将结果传送至控制盒,金手指夹爪缸29用来配合第一四轴机械臂4进行抓取和注油等操作。
36.实施例4:如图7所示,为了更好的对扫地机器人进行拧螺丝操作,在转盘机构2上设置螺钉导向机构25,所述螺钉导向机构25包括导向底板251,所述导向底板251的上面固定有双作用短行程气缸252,所述双作用短行程气缸252的上面设置有轴承单元253,所述导向底板251的四周各设置有一个导向轴254,所述导向轴254和所述轴承单元253的上面设置
有导向座255,所述导向座255的左边上部连接有左螺钉导向板256,所述导向座255的右边上部连接有右螺钉导向板257,所述左螺钉导向板256和所述右螺钉导向板257的中间设置有导向板连接单元258,所述导向板连接单元258的左侧连接所述左螺钉导向板256,所述导向板连接单元258的右侧连接所述右螺钉导向板257。
37.双作用短行程气缸252为轴承单元253提供旋转动力,导向轴254用来固定导向座255,导向座255放置左螺钉导向板256和右螺钉导向板257,左螺钉导向板256和右螺钉导向板257配合轴承单元253对螺丝进行下压定位,进行拧螺丝操作,将左螺钉导向板256和右螺钉导向板257旋开。
38.实施例5:如图8所示,为了配合第一四轴机械臂4进行抓取和注油等操作,在转盘机构2上设置金手指夹爪缸29,所述金手指夹爪缸29包括连接法兰291、夹爪安装板292、气动夹爪293、磁性开关294、中间顶料过渡板295、爪片296、夹爪中间导向套297、顶针298、喷雾阀安装板299和喷雾阀2910,所述连接法兰291连接所述第一四轴机械臂4,所述夹爪安装板292连接所述连接法兰291的底部,所述气动夹爪293连接所述夹爪安装板292的两侧,所述磁性开关294设置于所述气动夹爪293的中间,所述中间顶料过渡板295连接所述气动夹爪293的前面,所述爪片296固定于所述气动夹爪293的下面,所述夹爪中间导向套297设置于所述爪片296的中间,所述夹爪中间导向套297连接所述中间顶料过渡板295的下方,所述顶针298连接所述夹爪中间导向套297的下方,所述喷雾阀安装板299连接所述夹爪安装板292的后方,所述喷雾阀2910连接所述喷雾阀安装板299。
39.连接法兰291用来连接第一四轴机械臂4和金手指夹爪缸29,夹爪安装板292用来固定气动夹爪293,气动夹爪293用来抓取和放置金手指等操作,磁性开关294用来控制气动夹爪293的夹取和张开,中间顶料过渡板295顶取金手指配件,爪片296配合夹爪中间导向套297和顶针298对夹取的金手指配件进行放置,喷雾阀安装板299用来固定喷雾阀2910,喷雾阀2910用来给pcb进行注油操作。
40.实施例6:如图9所示,为了给扫地机器人装配进行供料,在上柜体底板13的上面固定有料塔机构3,所述料塔机构3包括第一大金手指料塔31、第二大金手指料塔32和小金手指料塔33,所述第一大金手指料塔31固定于所述上柜体底板13的上面,所述第二大金手指料塔32固定于所述第一大金手指料塔31的左侧,所述小金手指料塔33固定于所述第二大金手指料塔32的左侧;第一大金手指料塔31和第二大金手指料塔32对大金手指配件进行供料,小金手指料塔33对小金手指配件进行供料。
41.进一步地,如图10所示,为了给扫地机器人装配进行大金手指的供料,在上柜体底板13的上面固定有第一大金手指料塔31,所述第一大金手指料塔31包括料塔支架311,所述料塔支架311的中间设置有分度盘312,所述分度盘312的下面设置有料管分度盘313,所述分度盘312和所述料管分度盘313的中间设置有支撑轴314,所述支撑轴314穿过所述分度盘312和所述料管分度盘313,且所述支撑轴314固定于所述料塔支架311的上面,所述料塔支架311的后面固定有分度盘气缸支架315,所述分度盘气缸支架315的前面固定有分度盘气缸316,所述料管分度盘313的下面设置有导料槽317,所述导料槽317的前端设置有分料单元318,所述分料单元318固定于所述料塔支架311的前端,所述分料单元318的右侧固定有分料气缸319。
42.分度盘气缸316转动分度盘312和料管分度盘313转动,金手指沿着导料槽317向下
落料,分料气缸319将金手指从分料单元318推出。
43.分度盘312配合料管分度盘313对大金手指进行落料操作,支撑轴314支撑分度盘312和料管分度盘313的转动,分度盘气缸支架315用来固定分度盘气缸316,分度盘气缸316给分度盘312的转动提供动力支撑,导料槽317用来放置大金手指,分料气缸319配合分料单元318对大金手指进行分料操作。
44.实施例7:如图1所示,所述工业运动相机组件5的前面设置有运动相机显示器51,所述运动相机显示器51固定于所述上柜体12的内顶部。
45.工业运动相机组件5拍照确认,曲面块、pcb、驱动滑块变种是否正确,运动相机显示器51用来显示及存储工业运动相机的照片,配合工业运动相机检测及记录。
46.实施例8:如图1和图2所示,为了替代人工对配件的放置,在装配柜体1的前面设置有第二四轴机械臂8,为了方便第二四轴机械臂8对扫地机器人的放置和抓取,在第二四轴机械臂8的两侧各设置一个手柄滑道9,为了方便放置各个零部件,在手柄滑道9的前面设置有配件放置架10。
47.实施例9:不同于上述实施例,为了实现自动拧螺丝操作,在转盘机构2的左侧设置自动拧螺丝机构,自动拧螺丝机构固定于上柜体12的内部上方,当螺丝导向机构的左螺钉导向板256和右螺钉导向板257下压定位时,自动拧螺丝机构通过伸缩轴对大壳体进行拧螺丝操作,拧螺丝完成后,伸缩轴将自动拧螺丝机构拉起。
48.为了实现螺丝的持续供料,在上柜体12的顶部设置螺丝螺旋振动盘,螺丝螺旋振动盘的螺丝导料槽穿过上柜体12,且螺丝导料槽连接自动拧螺丝机构。
49.本发明的工作原理:第二四轴机械臂8取大壳体组件、pcb放入转盘21工装;第二四轴机械臂8取取驱动滑块手动注油后装入大壳体,工业运动相机组件5拍照确认,曲面块、pcb、驱动滑块变种是否正确;转盘机构2的转盘21转动180度,第一四轴机械臂4移至小金手指料塔33,金手指夹爪缸29夹紧,抓取小金手指,第一四轴机械臂4移至第二装配定位台,金手指夹爪缸29张开装入小金手指;第一四轴机械臂4移至第二大金手指料塔32,金手指夹爪缸29夹紧,抓取大金手指,第一四轴机械臂4移至第二装配定位台,金手指夹爪缸29张开装入大金手指;第一四轴机械臂4移至第一大金手指料塔31,金手指夹爪缸29夹紧,抓取大金手指,并至第二装配定位台,金手指夹爪缸29张开装入大金手指;扫描光源组件24扫描大壳体二维码,第一四轴机械臂4移至pcb上方,打开喷雾阀2910给pcb注油,转盘21转动180度,工业运动相机组件5拍照确认金手指装配无误。
50.第二四轴机械臂8取大壳体组件将pcb装入大壳体,两侧软板插入pcb,工业运动相机组件5拍照确认软板是否插入到位,扫描光源组件24扫描pcb二维码;第一四轴机械臂4取下盖装入大壳体,将螺钉导向机构25转动到位,接近开关检测到位,左螺钉导向板256和右螺钉导向板257下压定位,进行拧螺丝操作;将左螺钉导向板256和右螺钉导向板257旋开,接近开关检测到位,第二四轴机械臂8取出工件放入手柄滑道9中。
51.需要说明的是,上述各技术特征继续相互组合,形成未在上面列举的各种实施例,均视为本发明说明书记载的范围;并且,对本领域普通技术人员来说,可以根据上述说明加以改进或变换,而所有这些改进和变换都应属于本发明所附权利要求的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1