一种高精度的渐开线齿轮齿面微织构激光加工的方法及装置
1.本发明属于精密定位加工领域,具体涉及一种在齿轮的轮齿表面微织构激光加工的方法与装置。
背景技术:
2.在平面上加工微织构时,一般先将激光器的焦点调整至被加工的平面上,然后通过平面运动平台带动被加工工件运动,可以实现在平面的任一位置加工微织构。而齿轮轮齿的表面是一曲面,并且齿轮有多个齿,加工微织构的难度较高。常规齿轮加工方法难以确保轮齿表面微织构的加工精度。本发明提供了一种在齿轮的轮齿表面激光加工微织构的装置,通过平台多种运动复合成齿轮的渐开线运动,可实现在齿轮轮齿上加工微织构,提高微织构的加工精度,该装置具有成本低、易于制作安装的特点。
技术实现要素:
3.本发明提出了一种便于在齿轮的轮齿表面激光加工微织构的装置及方法,通过各个运动部件的配合,使齿轮的轮齿被加工位置在模拟渐开线运动的情况下,可以始终保持在激光器的焦点处。
4.为了实现上述技术目的,本发明所采用的技术方案如下:
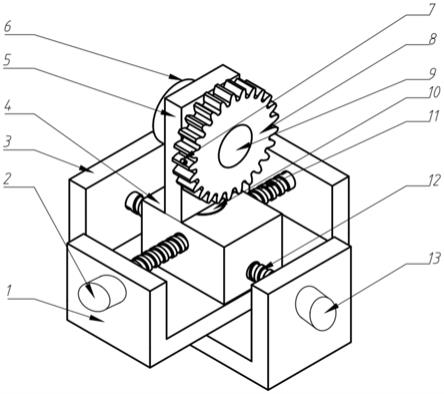
5.一种高精度的渐开线齿轮齿面微织构激光加工装置,装置包括u型平面平台1和平面平台3(u型面的两侧面垂直于底面);平面平台3位于装置底部,并与其上的平面平台1呈十字形交叉分布,且平面平台1的u型内侧中心设置有基座4,丝杠11通过平面平台1两端的孔与伺服电机2相连,丝杠12通过平面平台3两端的孔与伺服电机13相连,基座4与丝杠11螺纹连接,基座4与丝杠12螺纹连接,基座4内两个螺纹孔错位分布,并不干涉,旋转升降台10安装在基座4上,旋转升降台10底部安装有一小型旋转电机,该电机安装在基座4内部一平台上,该平台可通过控制器实现上下运动,通过平台上下运动和电机输出轴的旋转运动复合,即可控制旋转升降台10实现旋转、升降运动,竖板5固定安装在旋转升降台10上,使得竖版5可随着旋转升降台10旋转、升降,锥度心轴9与伺服电机6通过竖板5上的孔相连,齿轮8通过渐开线内花键安装在锥度心轴9上,可随着锥度心轴9的旋转而转动,将激光光源7安置在靠近齿轮8的位置,且固定不动。
6.进一步,基座4在平面平台1及平面平台3上的运动方向,由于基座4与丝杠11螺纹连接,当伺服电机2控制丝杠11转动时,基座4带着旋转升降台10、竖板5、伺服电机6、锥度心轴9以及齿轮8一起沿着丝杠11的轴向方向运动,通过伺服电机2的正反转可以实现基座4的往返运动,基座4的极限运动位置由丝杠11的螺纹长度决定,同理,当伺服电机14控制丝杠12转动时,基座4带着旋转升降台10、竖板5、伺服电机6、锥度心轴9以及齿轮8一起沿着丝杠12的轴向方向运动,通过伺服电机13的正反转可以实现基座4的往返运动,基座4的极限运动位置由丝杠12的螺纹长度决定;装置内三个伺服电机由统一控制器控制,以便协同工作。
7.进一步,所述基座4内装有控制器,用以控制小型旋转电机、旋转升降台10的旋转
运动和升降运动。
8.进一步,所有伺服电机,以及旋转升降台10应用统一的控制器实现同步协调控制。
9.进一步,齿轮8的几何中心布置于旋转升降台10的圆心的正上方。
10.一种高精度的渐开线齿轮齿面微织构激光加工方法,包括以下步骤:
11.先将由平面平台1、平面平台3以及竖板5的三者的中心线为基准建立空间直角坐标系,在保证激光光源7焦点不变的情况下,再通过伺服电机2、伺服电机13的协同工作,借助丝杠11、丝杠12的转动实现基座4在平面上的运动;由于安装齿轮8的锥度心轴9通过竖板5与伺服电机6共同安装在旋转升降台10上面,故只需要控制旋转升降台10进行旋转运动和升降运动,即可实现齿轮8在加工平台上的旋转运动和升降运动;因此,通过协同控制伺服电机2、伺服电机13以及旋转升降台10,便可控制齿轮8相对于激光光源7模拟渐开线轨迹运动。
12.进一步,还包括,在加工完一个轮齿8的表面后,只需要通过伺服电机6控制锥度心轴9转动,由锥度心轴9带动齿轮8转动,将齿轮8待加工轮齿齿面转动至激光光源7的焦点位置即可进行齿轮8下一齿面的微织构加工。
13.进一步,加工完齿轮8的所有轮齿的一边后,仅需要控制旋转升降台10旋转180
°
,就可以实现齿轮8所有轮齿另一边的加工。
14.进一步,加工齿轮8时应保持激光光源7的位置及输出功率恒定不变,离散式加工,以确保轮齿齿面微织构的加工精度。
15.一种在齿轮的轮齿表面激光加工微织构的装置,包括平面运动平台、竖板、伺服电机、轴、齿轮,所述竖板固定在运动平台的基座上,竖板相对于运动平台是可以旋转的,伺服电机装在竖板上,竖板上有一通孔,伺服电机的输出轴穿过竖板上的通孔与一轴相连,轴的另一端安装齿轮。进一步调节齿轮的位置,使轮齿的微织构加工区正好在激光光源的焦点上,进行连续激光加工时,通过伺服电机带动基座运动,调整齿轮位置,保持齿面随着基座模拟渐开线运动的同时一直处于光源的焦点位置处,再配合激光光源的直线运动来完成对齿轮各个齿面微织构的加工。在知道齿轮的几何参数的情况下,控制各个伺服电机协同作动是比较容易的。在加工齿轮时,应使用渐开线内花键齿形定位锥度心轴支承加工,以达到齿轮节圆与渐开线花键孔节圆同轴度要求,提高齿轮随着竖板渐开线运动路径的准确性,以提高微织构的加工精度。
16.本发明的有益效果为:
17.1.本发明在齿轮的轮齿表面激光加工微织构的装置,主要包括:平面运动平台、竖板、基座、伺服电机、激光光源等;本发明所设计的装置结构简单,制造方便,成本低。
18.2.本发明在知道齿轮几何参数的前提下,在齿轮轮齿激光加工微织构将会非常容易。
19.3.本发明的竖板可以旋转,既能实现齿轮齿面任意角度的微织构加工,也避免了只能加工某种类型的齿轮的情况,可以安装各种齿轮进行加工,同时也可降低齿轮加工的难度。
20.4.本发明齿轮微织构加工精度高,拥有更可靠的齿面微修形效果。
附图说明
21.图1是本发明的整体结构图;
22.图2是本发明的主视图及侧视图;
23.图3是本发明的加工流程图;
24.图4是本发明中基座在平面区域内的运动示意图;
25.图5是本发明中旋转升降台的工作方式示意图;
26.图6是本发明中旋转升降台的旋转尺度示意图;
27.图7是本发明中旋转升降台的升降尺度示意图;
28.图8是本发明数字化加工方法坐标轴示意图;
29.图9是本发明中加工前齿轮安装位置示意图;
30.图中:1.平面平台 2.伺服电机 3.平面平台 4.基座 5.竖板 6.伺服电机 7.激光光源 8.齿轮 9.锥度心轴 10.旋转升降台 11.丝杠 12.丝杠 13.伺服电机;
具体实施方式
31.下面结合附图对本发明的具体实施方式作进一步说明。示例实施例仅为帮助更好的理解本发明,并不构成对本发明的限定。附图仅为说明本实施例,并不是按照比例绘制。
32.请参照图1以及图2,一种在齿轮的轮齿表面激光加工微织构的装置,图1所示状态为初始静止状态,平面平台3位于装置底部,并与平面平台1呈十字形交叉分布,两个平面平台均可实现独立运动,互不干涉,丝杠11通过平面平台1内的孔与伺服电机2相连,丝杠12通过平面平台3上的孔与伺服电机13相连,基座4与丝杠11螺纹连接,基座4与丝杠12螺纹连接,基座4内两个螺纹孔错位分布,并不干涉,旋转升降台10安装在基座4上,竖板5固定安装在旋转升降台10上,使得竖版5可随着旋转升降台10旋转、升降,锥度心轴9与伺服电机6通过竖板5上的孔相连,齿轮8通过渐开线内花键安装在锥度心轴9上,可随着锥度心轴9的旋转而转动。
33.请参照图3,该图位本发明的加工流程示意图,在安装好加工装置后,加工流程如图2所示。
34.请参照图4,该图示意了基座4在平面平台1及平面平台3上的运动方向,由于基座4与丝杠11螺纹连接,当伺服电机2控制丝杠11转动时,基座4带着旋转升降盘10、竖板5、伺服电机6、锥度心轴9以及齿轮8一起沿着丝杠11的轴向方向运动,通过伺服电机2的正反转可以实现基座4的往返运动,基座4的极限运动位置由丝杠11的螺纹长度决定,同理,当伺服电机14控制丝杠12转动时,基座4带着旋转升降盘10、竖板5、伺服电机6、锥度心轴9以及齿轮8一起沿着丝杠12的轴向方向运动,通过伺服电机13的正反转可以实现基座4的往返运动,基座4的极限运动位置由丝杠12的螺纹长度决定。装置内三个伺服电机由统一控制器控制,以便协同工作。
35.请参照图5、图6以及图7,该图示意了旋转升降台10在基座4上的运动方式。旋转升降台10由安装在基座4内的一步进电机控制运动,可实现竖板5任意角度的旋转运动,装置内也标有刻度值,可依据需求调整角度,也可以抬高或降低竖板5的位置以调控齿轮的位置,旋转升降台10抬起高度标有刻度,抬高的高度依据加工需求调整。在齿轮齿面加工前可以通过伺服电机2、伺服电机13以及旋转升降台10的配合可以实现齿轮8在空间上任意位置
定位。
36.请参考图8,该图为齿轮8加工过程时便于伺服电机2、伺服电机6以及伺服电机13控制加工所规定的空间直角坐标系。取如图所示丝杠11的轴向方向为x轴正方向,丝杠12的轴向方向为z轴,垂直于丝杠11与丝杠12所构成的平面的方向为y轴正方向,基座4的中心定为原点o。
37.请参考图9,该图为齿轮8齿面微织构加工过程中的初始位置,即将激光光源7对准齿面,并保持激光光源7的焦点不变,通过伺服电机2控制丝杠11转动调整基座4在x轴方向上的位置,通过伺服电机13控制丝杠12转动调整基座4在z轴方向上的位置,使基座4带动旋转升降台10上的竖板5移动,以此达到移动安装在竖板5上齿轮8的目的。通过伺服电机2以及伺服电机13的配合将齿轮8的待加工轮齿面移动到激光光源7的正下方,然后再通过伺服电机6的转动控制锥度心轴9带动齿轮8转动,使齿轮8的待加工点的切面垂直于激光光源7,再通过旋转升降台10的升降带动竖板5关于z轴方向运动,以此调整齿轮8轮齿待加工点位于激光光源7的焦点位置。
38.由于渐开线齿轮齿面加工难以通过正常的加工手段进行高精度的加工,故本发明接下来提出一种通过模拟渐开线齿轮的成形过程来提高渐开线齿轮轮齿表面微织构的加工精度。由于直角坐标系难以表示出渐开线方程中x轴于y轴的运动关系,故将上述所建立的空间直角坐标系中的xoy平面转换为极坐标系,坐标元素分别为半径r与转角θ。将齿轮8定位完成后,开始齿轮8轮齿表面微织构加工,在激光光源7打开后,由伺服电机13控制丝杠12转动,由丝杠12带动基座4沿着z轴正方向运动,根据所设计的微织构尺寸及间隙d要求,齿轮8每沿z轴正方向运动一个d的距离,激光光源7便在齿轮8轮齿表面加工一个微织构,直到完成整个齿轮8齿厚方向上微织构的要求,关闭激光光源7,由伺服电机2控制丝杠11转动,由丝杠11带动基座4沿着x轴正方向运动,位移量x满足方程x=r
×
cos(θ+α)+(θ+α)
×r×
sin(θ+α),其中r和θ是运动平面以基座为原点的极坐标系的坐标元素,α则是齿轮8的压力角,同理,由旋转升降台10带动竖板5沿着y轴移动,由竖板5带动齿轮8沿着y轴正方向运动,位移量y满足方程y=r
×
sin(θ+α)-(θ+α)
×r×
cos(θ+α),其中r和θ是运动平面以基座为原点的极坐标系的坐标元素,α则是齿轮8的压力角,通过x轴和y轴的运动,使齿轮8的移动路径复合后为齿轮8的渐开线轮廓,然后再根据微织构尺寸及间隙d的要求,确定r和θ的值,使得复合后齿轮8在渐开线轮廓上的路程为d,再打开激光光源7,由伺服电机13控制丝杠12转动,由丝杠12带动基座4沿着z轴负方向运动,根据所设计的微织构尺寸及间隙d要求,齿轮8每沿z轴正方向运动一个d的距离,激光光源7便在齿轮8轮齿表面打一个微织构,直到完成整个齿轮8齿厚方向上微织构的要求,依次类推,直到完成整个轮齿齿面微织构的加工。这种方法使得激光光源7在齿轮往返路径上都可以实现微织构的加工,既能节省时间也可以减小能耗。当齿轮8某一轮齿的一面全部加工完成后,由伺服电机6控制锥度心轴9转动,带动齿轮8进行转动,转动角度为360
°
/z,z为齿轮8的齿数。依次重复上述操作,即可将齿轮8上轮齿的同一面全部加工完成。
39.若齿轮要求两面全部加工微织构,该图显示为齿轮8加工完所有轮齿的一面后,通过旋转升降台10带动竖板5进行180
°
转动,保证其余位置不变,将齿轮8轮齿未加工的一面置于激光光源7,再重复上述加工步骤即可完成所有面的加工。
40.齿轮8轮齿表面微织构化后虽然降低了摩擦副表面粗糙度,但可以降低轮齿表面
的摩擦因数,并减少齿面磨损,以此提高齿轮副的啮合精度。同时,由于齿轮8接触区域的啮合精度得到了提升,由齿轮8所构成的齿轮副振动、噪声、热耗散以及材料迁移都将得到改善,故由上述微织构激光加工后的齿轮8的服役寿命得到了大幅度的提高。这种通过改变加工方式,提高加工精度以提高工件性能及寿命的方法对于我国现阶段亟需跨越式发展的现实需求有着重要的实施意义。
41.以上实施例仅用于说明本发明的设计思想和特点,其目的在于使本领域内的技术人员能够了解本发明的内容并据以实施,本发明的保护范围不限于上述实施例。所以,凡依据本发明所揭示的原理、设计思路所作的等同变化或修饰,均在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1