一种金属加工用自动焊接机械手的制作方法
1.本实用新型涉及金属加工设备技术领域,特别涉及一种金属加工用自动焊接机械手。
背景技术:
2.焊接,也称作熔接,是一种以加热、高温或者高压的方式接合金属或其他热塑性材料如塑料的制造工艺及技术。现代焊接的能量来源有很多种,包括气体焰、电弧、激光、电子束、摩擦和超声波等。除了在工厂中使用外,焊接还可以在多种环境下进行,如野外、水下和太空。无论在何处,焊接都可能给操作者带来危险,所以在进行焊接时必须采取适当的防护措施。焊接给人体可能造成的伤害包括烧伤、触电、视力损害、吸入有毒气体、紫外线照射过度等;传统的金属加工用自动焊接机械手有一些缺点,当焊接的金属焊接口过宽时,由于在焊接口过宽时,需要进行多次焊接,从而使得金属物品焊接口被完全焊接,在焊接时,需要工人多次移动传统设备,从而使得传统设备进行焊接工作,由于需要工人多次移动传统焊接设备,从而导致不便于传统设备的焊接工作,而且降低了工人的工作效率。
技术实现要素:
3.本实用新型的主要目的在于提供一种金属加工用自动焊接机械手,可以有效解决背景技术中的问题。
4.为实现上述目的,本实用新型采取的技术方案为:
5.一种金属加工用自动焊接机械手,包括支撑柱,所述支撑柱的上端设置有控制机构,所述控制机构包括固定设置在支撑柱上端的底座,所述底座的上端安装有电机,所述电机的一端活动设置有转动轴,所述转动轴的外侧活动设置有轴承,所述转动轴的外侧靠近轴承的一侧固定设置有固定环,所述固定环的后端固定设置有固定杆,所述固定杆的后端固定设置有连接环,所述连接环的内侧活动设置有连接杆,所述连接杆的外侧靠近连接环的一侧活动设置有控制环,所述控制环的前端固定设置有控制杆,所述控制杆的前端固定设置有活动环,所述活动环的外侧通过转轴活动设置有连接架,所述连接架的外侧通过转轴活动设置有移动架,所述移动架的下端固定设置有滑块,所述滑块的外侧活动设置有滑动架,所述滑动架的前端固定设置有控制架,所述控制架的上端开设有卡槽,所述控制架的内侧活动设置有内螺纹环,所述内螺纹环的内侧螺纹设置有螺纹轴,所述内螺纹环的外侧靠近控制架的前侧固定设置有齿轮轴,所述卡槽的内侧滑动设置有卡块,所述卡块的上端固定设置有固定板,所述固定板的下端靠近卡块的前侧固定设置有齿轮板。
6.优选的,所述轴承的下端与支撑柱的上端靠近底座的一侧固定连接,所述螺纹轴的后端与连接架的前端固定连接。
7.优选的,所述齿轮轴的上端与齿轮板的下端啮合连接,所述控制机构的数量有两组,两组所述控制机构均分布在支撑柱的上端,两组所述控制机构为中心对称。
8.优选的,所述支撑柱的前端固定设置有支撑架,所述支撑架的上端固定设置有操
作板,所述固定板的上端固定设置有机械臂。
9.优选的,所述滑动架的下端与操作板的上端固定连接,所述支撑架的形状为u字形。
10.优选的,所述机械臂的数量有四组,四组所述机械臂平均分布在两组固定板的上端。
11.与现有技术相比,本实用新型具有如下有益效果:
12.使用时,首先将需要焊接的金属物品放到操作板的上端,然后将金属物品的焊接口调整到机械臂的下端,然后启动机械臂,再启动电机,使得电机带动转动轴旋转,从而使得转动轴通过固定环带动固定杆旋转,由于固定杆与连接环固定连接、连接环与连接杆活动连接、连接杆与控制环活动连接、控制环与控制杆固定连接,从而使得固定杆通过连接环、连接杆、控制环推动控制杆移动,从而使得控制杆通过活动环、连接架推动移动架移动,使得移动架带动滑块在滑动架的内侧中移动,而且连接架推动螺纹轴移动,由于转动轴通过固定环带动固定杆旋转,使得固定杆通过连接杆带动控制杆反复往返移动,从而使得控制杆带动螺纹轴反复往返移动,由于螺纹轴与内螺纹环之间螺纹连接,从而使得螺纹轴带动内螺纹环在控制架的内侧中反复往返旋转,从而内螺纹环带动齿轮轴旋转,由于齿轮轴与齿轮板之间啮合连接,所以齿轮轴带动齿轮板反复往返移动,使得齿轮板带动固定板移动,使得固定板带动卡块在卡槽的内侧中滑动,从而使得固定板带动机械臂反复往返移动,从而使得机械臂反复往返移动进行焊接工作,通过固定杆带动控制杆反复往返移动从而使得齿轮轴带动固定板进行反复往返移动,可以达到设备自动反复移动进行焊接工作,提高工人的工作效率。
附图说明
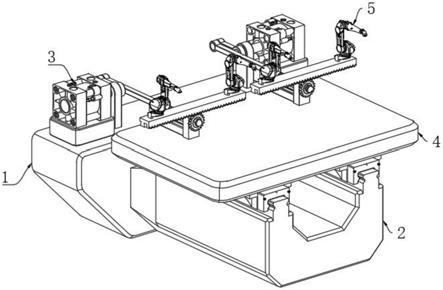
13.图1为本实用新型一种金属加工用自动焊接机械手的整体结构示意图;
14.图2为本实用新型一种金属加工用自动焊接机械手的控制机构结构示意图;
15.图3为本实用新型一种金属加工用自动焊接机械手的控制机构局部剖切结构示意图;
16.图4为本实用新型一种金属加工用自动焊接机械手的a部放大结构示意图。
17.图中:1、支撑柱;2、支撑架;3、控制机构;31、底座;32、电机;33、转动轴;34、轴承;35、固定环;36、固定杆;37、连接环;38、连接杆;39、控制环;310、控制杆;311、活动环;312、连接架;313、移动架;314、滑动架;315、滑块;316、控制架;317、卡槽;318、内螺纹环;319、螺纹轴;320、齿轮轴;321、卡块;322、固定板;323、齿轮板;4、操作板;5、机械臂。
具体实施方式
18.为使本实用新型实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体实施方式,进一步阐述本实用新型。
19.如图1
‑
4所示,一种金属加工用自动焊接机械手,包括支撑柱1,支撑柱1的上端设置有控制机构3,控制机构3包括固定设置在支撑柱1上端的底座31,底座31的上端安装有电机32,电机32的一端活动设置有转动轴33,转动轴33的外侧活动设置有轴承34,转动轴33的外侧靠近轴承34的一侧固定设置有固定环35,固定环35的后端固定设置有固定杆36,固定
杆36的后端固定设置有连接环37,连接环37的内侧活动设置有连接杆38,连接杆38的外侧靠近连接环37的一侧活动设置有控制环39,控制环39的前端固定设置有控制杆310,控制杆310的前端固定设置有活动环311,活动环311的外侧通过转轴活动设置有连接架312,连接架312的外侧通过转轴活动设置有移动架313,移动架313的下端固定设置有滑块315,滑块315的外侧活动设置有滑动架314,滑动架314的前端固定设置有控制架316,控制架316的上端开设有卡槽317,控制架316的内侧活动设置有内螺纹环318,内螺纹环318的内侧螺纹设置有螺纹轴319,内螺纹环318的外侧靠近控制架316的前侧固定设置有齿轮轴320,卡槽317的内侧滑动设置有卡块321,卡块321的上端固定设置有固定板322,固定板322的下端靠近卡块321的前侧固定设置有齿轮板323。
20.本实施例中,轴承34的下端与支撑柱1的上端靠近底座31的一侧固定连接,螺纹轴319的后端与连接架312的前端固定连接,齿轮轴320的上端与齿轮板323的下端啮合连接,控制机构3的数量有两组,两组控制机构3均分布在支撑柱1的上端,两组控制机构3为中心对称。
21.具体的,启动电机32,使得电机32带动转动轴33旋转,从而使得转动轴33通过固定环35带动固定杆36旋转,由于固定杆36与连接环37固定连接、连接环37与连接杆38活动连接、连接杆38与控制环39活动连接、控制环39与控制杆310固定连接,从而使得固定杆36通过连接环37、连接杆38、控制环39推动控制杆310移动,从而使得控制杆310通过活动环311、连接架312推动移动架313移动,使得移动架313带动滑块315在滑动架314的内侧中移动,而且连接架312推动螺纹轴319移动,由于转动轴33通过固定环35带动固定杆36旋转,使得固定杆36通过连接杆38带动控制杆310反复往返移动,从而使得控制杆310带动螺纹轴319反复往返移动,由于螺纹轴319与内螺纹环318之间螺纹连接,从而使得螺纹轴319带动内螺纹环318在控制架316的内侧中反复往返旋转,从而内螺纹环318带动齿轮轴320旋转,由于齿轮轴320与齿轮板323之间啮合连接,所以齿轮轴320带动齿轮板323反复往返移动,使得齿轮板323带动固定板322移动,使得固定板322带动卡块321在卡槽317的内侧中滑动,从而使得固定板322带动机械臂5反复往返移动,从而使得机械臂5反复往返移动进行焊接工作,通过固定杆36带动控制杆310反复往返移动从而使得齿轮轴320带动固定板322进行反复往返移动,可以达到设备自动反复移动进行焊接工作,提高工人的工作效率。
22.本实施例中,支撑柱1的前端固定设置有支撑架2,支撑架2的上端固定设置有操作板4,固定板322的上端固定设置有机械臂5,滑动架314的下端与操作板4的上端固定连接,支撑架2的形状为u字形,机械臂5的数量有四组,四组机械臂5平均分布在两组固定板322的上端。
23.具体的,通过四组机械臂5的作用,可以达到进行焊接工作的目的。
24.工作原理:
25.使用时,首先将需要焊接的金属物品放到操作板4的上端,然后将金属物品的焊接口调整到机械臂5的下端,然后启动机械臂5,再启动电机(型号为:ys8024)32,使得电机32带动转动轴33旋转,从而使得转动轴33通过固定环35带动固定杆36旋转,由于固定杆36与连接环37固定连接、连接环37与连接杆38活动连接、连接杆38与控制环39活动连接、控制环39与控制杆310固定连接,从而使得固定杆36通过连接环37、连接杆38、控制环39推动控制杆310移动,从而使得控制杆310通过活动环311、连接架312推动移动架313移动,使得移动
架313带动滑块315在滑动架314的内侧中移动,而且连接架312推动螺纹轴319移动,由于转动轴33通过固定环35带动固定杆36旋转,使得固定杆36通过连接杆38带动控制杆310反复往返移动,从而使得控制杆310带动螺纹轴319反复往返移动,由于螺纹轴319与内螺纹环318之间螺纹连接,从而使得螺纹轴319带动内螺纹环318在控制架316的内侧中反复往返旋转,从而内螺纹环318带动齿轮轴320旋转,由于齿轮轴320与齿轮板323之间啮合连接,所以齿轮轴320带动齿轮板323反复往返移动,使得齿轮板323带动固定板322移动,使得固定板322带动卡块321在卡槽317的内侧中滑动,从而使得固定板322带动机械臂5反复往返移动,从而使得机械臂5反复往返移动进行焊接工作,通过固定杆36带动控制杆310反复往返移动从而使得齿轮轴320带动固定板322进行反复往返移动,可以达到设备自动反复移动进行焊接工作,提高工人的工作效率。
26.以上显示和描述了本实用新型的基本原理和主要特征和本实用新型的优点。本行业的技术人员应该了解,本实用新型不受上述实施例的限制,上述实施例和说明书中描述的只是说明本实用新型的原理,在不脱离本实用新型精神和范围的前提下,本实用新型还会有各种变化和改进,这些变化和改进都落入要求保护的本实用新型范围内。本实用新型要求保护范围由所附的权利要求书及其等效物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1