一种具备缓冲的螺母组装装置及花鼓自动组装设备的制作方法
1.本实用新型总体来说涉及一种机械加工的技术领域,具体而言,涉及一种具备缓冲的螺母组装装置及花鼓自动组装设备。
背景技术:
2.螺母通常与螺栓或螺杆拧在一起用来起紧固作用的零件,比如在组装自行车花鼓时,通常需要将螺母旋合到螺杆上。
3.但是,在现有技术中的的组装设备中通常全自动化程度不高,虽然有些设备能够实现半自动化组装,但是其无法应用到批量化装配螺母的自动组装生产线上,仍然需要人工辅助来完成,人工成本高,自动化程度不高和效率低的问题。因此迫切地需要重新设计一款新的设计展示装置以解决上述问题。
4.在所述背景技术部分公开的上述信息仅用于加强对本实用新型的背景的理解,因此它可以包括不构成对本领域普通技术人员已知的现有技术的信息。
技术实现要素:
5.在实用新型内容部分中引入了一系列简化形式的概念,这将在具体实施方式部分中进一步详细说明。本实用新型内容部分并不意味着要试图限定出所要求保护的技术方案的关键特征和必要技术特征,更不意味着试图确定所要求保护的技术方案的保护范围。
6.本实用新型的一个主要目的在于克服上述现有技术的至少一种缺陷,提供一种能将螺母自动组装至螺杆上,提高组装效率的一种具备缓冲的螺母组装装置及花鼓自动组装设备。
7.为实现上述实用新型目的,本实用新型采用如下技术方案:
8.根据本实用新型的一个方面,提供了一种具备缓冲的螺母组装装置,所述具备缓冲的螺母组装装置包括能够将螺母旋转至螺杆中的机械手,所述机械手包括旋转结构,所述旋转结构内嵌设有缓冲结构,所述缓冲结构能够实现轴向的往复。
9.通过机械手能够将螺母旋转至螺杆中,以及机械手中旋转结构内嵌设的缓冲机构,能够实现轴向往复,使得螺母能够自动组装至螺杆,且在组装过程有缓冲机构的作用,避免螺母与螺杆间出现卡死的现象。
10.根据本实用新型的一实施方式,其中所述缓冲结构包括弹性件,所述弹性件嵌设在所述旋转结构内。
11.通过弹性件嵌设在旋转结构内,在螺母旋转的过程中,弹性件能够分担轴向的力,避免螺母与螺杆间压力太大出现损伤。
12.根据本实用新型的一实施方式,其中所述旋转结构包括旋转电机、从动轴和旋转杆,所述旋转电机连接所述从动轴,所述弹性件的两端分别连接所述从动轴与所述旋转杆。
13.根据本实用新型的一实施方式,其中所述旋转结构上设置有联轴器和轴套,所述旋转电机与所述从动轴通过所述联轴器连接,所述旋转杆与弹性件设置在所述轴套内。
14.通过弹性件两端分别连接从动轴和旋转杆,旋转杆与弹性件设置在轴套内,能够使弹性件有力的作用缓冲时,能够稳定在轴套内;通过从动轴与联轴器连接,弹性件与从动轴和旋转杆连接,使得旋转电机旋转时,能间接带动旋转杆的旋转。
15.根据本实用新型的一实施方式,其中所述缓冲结构还包括限制结构,用以限制机械手沿轴向的缓冲范围。
16.根据本实用新型的一实施方式,其中所述限制结构包括设置在所述机械手上的滑槽以及能够与所述滑槽配合的活动块,所述活动块设置在所述旋转结构上。
17.通过设置在旋转结构的活动块,能够滑槽配合,使得机械手能够沿着轴向有一定的缓冲范围。
18.根据本实用新型的一实施方式,其中所述机械手包括取件结构,所述取件结构包括套件和磁力件,所述套件能够与所述旋转结构连接,所述磁力件设置在所述套件内,所述套件能够容置所述螺母,所述磁力件能够吸取所述螺母。
19.根据本实用新型的一实施方式,其中所述套件与所述旋转结构之间采用可拆装的连接方式。
20.通过磁力件设置在套件内且套件能够容纳螺母,使得磁力件能够将螺母吸取到套件内。通过套件与旋转结构之间采用可拆装的连接方式,可以根据不同螺母形状进行更换相对应套件。
21.根据本实用新型的一实施方式,其中所述机械手包括定向结构,所述定向结构包括感应器以及感应片,所述感应片能够穿过所述感应器,所述感应片所指方向为所述螺母预设方向。
22.通过感应片所指方向为螺母预设方向,感应片能够穿过感应器,能够实现感应片被感应器检测到时,此时位置为螺母预设方向。
23.根据本实用新型的另一方面,一种花鼓自动组装设备,其特征在于,包括上述任意一项所述具备缓冲的螺母组装装置,以及转盘,所述转盘上设置有能够固定所述螺杆的工装。
24.通过转盘的转动,能够将螺杆间歇流转至不同工位;转盘上设置能够固定螺杆的工装,避免螺杆在组装螺母过程出现晃动情况。通过具备缓冲的螺母组装装置、转盘和转盘上固定螺杆的工装的配合,能够使螺母自动组装至螺杆上,提高组装的效率。
附图说明
25.通过结合附图考虑以下对本实用新型的优选实施例的详细说明,本实用新型的各种目标、特征和优点将变得更加显而易见。附图仅为本实用新型的示范性图解,并非一定是按比例绘制。在附图中,同样的附图标记始终表示相同或类似的部件。其中:
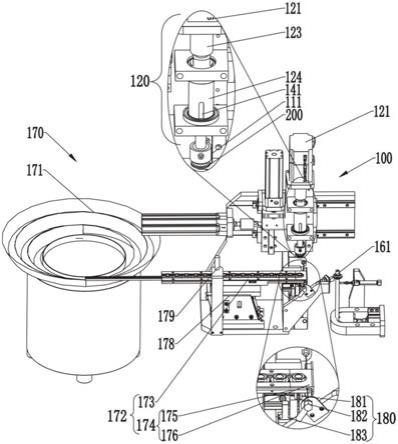
26.图1是根据一实施例的一种具备缓冲的螺母组装装置的示意图。
27.图2是图1中一种具备缓冲的螺母组装装置的机械手一剖面示意图。
28.图3是根据另一实施例的一种具备缓冲的螺母组装装置的示意图。
29.图4是图3中一种具备缓冲的螺母组装装置中的一剖面示意图。
30.图5是一种花鼓自动组装设备的示意图。
31.图6是图5中一种花鼓自动组装设备的转盘示意图。
32.其中,附图标记说明如下:
33.100、机械手;110、取件结构;111、套件;112、磁力件;120、旋转结构;121、旋转电机;122、连接件;123、联轴器;124、轴套;125、从动轴;126、旋转杆;130、缓冲结构;131、弹性件;140、限制结构;141、滑槽;142、活动块;150、定向结构;151、第四感应器;152、感应片;153、夹紧机构;154、夹紧板;155、弹性块;156、夹紧气缸;157、第五感应器; 161、第三感应器;170、输送机构;171、振动盘;172、输送轨道;173、输送结构;174、输出结构;175、底板;176、压板;178、直振器;179、第一感应器;180、顶出机构;181、夹爪;182、第二感应器;183、驱动件; 190、转盘;191、工装;192、抵压气缸;193、边框;194、抵压块;195、抵压驱动件;196、槽口;200、螺母;210、花鼓自动组装设备。
具体实施方式
34.现在将参考附图更全面地描述示例实施方式。然而,示例实施方式能够以多种形式实施,且不应被理解为限于在此阐述的实施方式;相反,提供这些实施方式使得本实用新型将全面和完整,并将示例实施方式的构思全面地传达给本领域的技术人员。图中相同的附图标记表示相同或类似的结构,因而将省略它们的详细描述。
35.在下文的描述中,给出了大量具体的细节以便提供对本实用新型更为彻底的理解。然而,对于本领域技术人员来说显而易见的是,本实用新型可以无需一个或多个这些细节而得以实施。在其他的例子中,为了避免与本实用新型发生混淆,对于本领域公知的一些技术特征未进行描述。
36.参见图1和图2,图1和图2中代表性地能够体现本实用新型的原理的一种具备缓冲的螺母组装装置,能够用于将螺母200组装至带螺纹的螺杆上,具备缓冲的螺母组装装置包括能够将螺母200旋转至螺杆中的机械手100,机械手100包括旋转结构120,旋转结构120内嵌设有缓冲结构130,缓冲结构130能够实现轴向的往复。
37.在另一实施例中,机械手100包括取件结构110、旋转结构120、缓冲结构130、限制结构140、定向结构150、滑轨结构和第三感应器161。取件结构110与旋转结构120连接,并设置在旋转结构120的输出端;旋转结构 120能够驱动取件结构110旋转运动,取件结构110能够吸取螺母200;滑轨结构与旋转结构120连接,滑轨结构能够驱动旋转结构120上下前后运动,继而滑轨结构能够间接将取件结构110进行上下前后运动,使得取件结构110 能够到达螺母200正方上和组装位置螺杆的正上方位置;缓冲结构130嵌设在旋转结构120内,起到机械手100的缓冲作用;限制结构140用于限制所述缓冲结构130沿轴向的活动范围;定向结构150与旋转结构120连接,能够限制螺母200预设方向;第三感应器161设置在螺杆旁,能够对准螺杆预定高度,检测螺母200是否旋转到位。
38.取件结构110包括套件111和磁力件112,磁力件112设置在套件111 内,套件111内设有空腔且能够容置螺母200,磁力件112能够吸取螺母200。
39.磁力件112可以是磁铁,通过磁力能够将螺母200吸取住。磁力件112 的直径比套件111直径小且能够内嵌于套件111内,磁力件112与旋转结构 120连接。
40.虽然在上述实施例中,磁力件112可以是磁铁,通过磁力能够将螺母200 吸取住。但本实用新型不限制于此:例如,可以根据实际应用情况将磁力件 112替换成吸盘,吸盘能够内嵌于套件111内,吸盘吸取螺母200的力能够大于螺母200的重力,但不会影响螺母200
旋转至螺杆后吸取结构脱离螺母 200。
41.套件111能够套住磁力件112以及旋转结构120输出端,套件111与旋转结构120之间采用可拆装的连接方式,可以是通过螺栓将套件111连接于旋转结构120的输出端,套件111上的空腔可以与圆形螺母200、四角螺母 200和六角螺母200等等螺母200外圈形状相匹配,可以根据不同螺母200 进行跟换具有不同空腔形状的套件111。
42.虽然在上述实施例中,套件111与旋转结构120之间可以是通过螺栓将套件111连接于旋转结构120的输出端。但本实用新型不限制于此:例如,可以根据装置实际应用情况将套件111与旋转结构120通过螺栓连接进行替换,替换成套件111内壁具有螺纹,旋转结构120与套件111连接处也具有螺纹,套件111可以旋转固定于旋转结构120上。
43.旋转结构120包括旋转电机121和连接件122。旋转电机121设置于连接件122上方,旋转电机121能够驱动连接件122旋转,继而驱动与连接件 122连接的取件结构110旋转。连接件122包括从动轴125和旋转杆126,从动轴125与旋转电机121连接,通过从动轴125的转动能够带动旋转杆126 的转动,旋转杆126与套件111连接。
44.旋转结构120还包括联轴器123和轴套124,从上至下,以旋转电机121 的输出端起,依次连接有联轴器123、从动轴125、轴套124和旋转杆126。联轴器123设置有两个能够容纳旋转电机121输出端和从动轴125的空间,并且能够固定旋转电机121和从动轴125相对位置不变,不会在容纳空间内打滑。轴套124与从动杆、旋转杆126之间采用可拆装的连接方式,可以是通过螺栓将轴套124与从动杆、轴套124与旋转杆126进行连接。
45.缓冲结构130包括弹性件131,弹性件131可以是弹簧,弹簧与从动轴 125和旋转杆126连接,能够嵌设在轴套124内,通过弹簧以及从动轴125 和旋转杆126之间距离能够做轴向的往复运动。弹簧的一端可以是平面与旋转杆126连接,弹簧的另一端直径可以是比从动轴125大,从动轴125插入弹簧内,并通过螺栓将轴套124、弹簧和从动轴125连接,避免旋转结构120 在旋转状态下,弹簧在轴套124内打滑对轴套124和从动轴125造成损伤。
46.虽然在上述实施例中,弹性件131可以是弹簧,弹簧与从动轴125和旋转杆126连接,能够嵌设在轴套124内。但本实用新型不限制于此:例如,可以根据实际情况将弹簧替换成能够压缩的弹性杆、弹性条内置于轴套124 内,与从动轴125和旋转杆126连接。
47.限制结构140包括设置在机械手100上的滑槽141以及能够与滑槽141 配合的活动块142,活动块142设置在旋转结构120上,限制结构140能够限制缓冲结构130沿轴向的活动范围。
48.滑槽141可以设置在旋转结构120的轴套124上,滑槽141可以其中两相对边为圆弧形与活动块142相匹配,另外两相对边相互平行且这两相对边距离比活动块142的直径大0.01-0.1mm。活动块142能够在滑槽141里面沿轴向运动,不会卡死。
49.虽然在上述实施例中,滑槽141以及能够与滑槽141配合的活动块142,滑槽141可以设置在旋转结构120的轴套124上。但本实用新型不限制于此:例如,可以根据实际情况将件旋转结构120上的滑槽141和活动块142替换成限制环,限制环套设于旋转杆126上且靠近吸取结构,限制环与轴套124 之间预设一定距离,使限制环能够限制缓冲结构130沿轴向的活动范围。
50.定向结构150包括第四感应器151以及感应片152,感应片152能够穿过第四感应器151,感应片152所指方向为螺母200预设方向。感应片152 可以是t形片,t形片可以有两片,
两片t形片夹角为180
°
并通过螺栓与轴套124连接。第四感应器151设置有感应槽,感应槽比t形片的厚度大, t形片能够通过感应槽。当感应槽红外线被t形片阻断时,即t形片正好位于感应槽内中间位置,此时为螺母200预设方向。
51.参见图3和图4,在另一实施例中,机械手100还包括第五感应器157。两个第五感应器157设置于机械手100下方,且分设于工装191上螺杆的两侧,第五感应器157可以是激光感应器,两个第五感应器157高度一致。当转盘190将工装191上的螺杆移动当前工位时,两个第五感应器157伸出来,两个第五感应器157激光对应的位置为螺母200下锁预设位置,两个激光感应器能够识别螺母200是否下锁到位。
52.在另一实施例中,机械手100还包括夹紧机构153包括夹紧板154、弹性块155和夹紧气缸156,夹紧气缸156的气缸头顶到弹性块155时,两块夹紧板154会做相对远离运动,即两块夹板张开,两块夹紧板154所处的位置为螺母200下锁预设的位置。当夹紧气缸156的气缸头缩收不在顶住弹性块155时,弹性块155由于弹性作用弹回初始位置,即两块夹紧板154做相对闭合运动,夹紧螺母200。夹紧板154可以是透明材质,第五感应器157 的激光能够通过夹紧板154,进行检查螺母200是否下锁到位。闭合状态下两个夹紧板154之间距离为螺母200直径,能够夹紧螺母200。
53.虽然在上述实施例中,夹紧机构153包括夹紧板154、弹性块155和夹紧气缸156。但本实用新型不限制于此:例如,夹紧机构153可以根据实际应用情况替换成能够伸缩的开口夹板,开口夹板的开口能夹紧已经组装在螺杆上的螺母200,避免在多个螺母200组装至螺杆上时,已组装好的螺母200 发生移位。
54.滑轨结构可以包括竖直滑块、水平滑块、竖直滑槽、水平滑槽、竖直气缸以及水平气缸。水平滑槽与水平气缸连接,水平滑块能够在水平滑槽内前后移动;竖直滑槽与竖直气缸连接,竖直滑块能够在竖直滑槽内上下移动。水平滑块与竖直滑槽连接,竖直滑块与旋转结构120连接。水平气缸与水平滑块连接,竖直滑块与竖直气缸连接。通过水平气缸与水平滑块连接,且间接与旋转结构120连接,使得水平滑块在水平滑槽运动时,旋转结构120也能进行水平方向运动。通过竖直气缸与竖直滑块连接,且间接与旋转结构120 连接,使得竖直滑块在竖直滑槽运动时,旋转结构120也能进行竖直方向运动。
55.滑轨结构还包括支架,支架包括竖直气缸固定板、水平气缸固定板、竖直活动板、水平活动板。水平气缸的气缸头穿过水平气缸固定板,水平气缸的气缸头与水平滑块连接,水平滑块与水平活动板连接;竖直气缸的气缸头穿过竖直气缸固定板,竖直气缸的气缸头与竖直滑块连接,竖直滑块与竖直活动板连接,竖直气缸固定板与水平活动板连接。
56.竖直活动板连接有水平放置的第一层板、第二层板和第三层板。旋转电机121的电机头穿过第一层与联轴器123连接,旋转电机121固定连接于第一层板。第二层板与第三层板内设有至少4个轴承与轴套124连接,使旋转电机121旋转时,旋转结构120更加稳定且旋转过程减少磨损。
57.参见图5和图6,图5和图6中代表性地能够体现本实用新型的原理的一种花鼓自动组装设备210,包括上述一种具备缓冲的螺母组装装置,以及转盘190。转盘190能够间歇流转至不同工位,不同工位上的螺母200自动组装装置可以进行各个工位上预定的组装工序。
58.转盘190包括能够固定螺杆的工装191,工装191上有抵压气缸192、边框193、抵压块194和抵压驱动件195。抵压气缸192通过弹簧板与边框 193连接,抵压气缸192可以设置
于工装191正上方,抵压气缸192能够抵压螺杆上的螺母200,避免螺母200因为震动而出现自动旋转,偏移螺母200 预设平行度与下锁的位置。抵压驱动件195连接于边框193的一端,抵压块 194与抵压驱动件195连接,抵压块194能够通过抵压驱动件195的驱动伸缩运动至边框193的另一端。抵压块194与边框193之间设置有适配的槽口 196以夹持螺杆,通过抵压驱动件195的驱动,抵压块194相对边框193开合,实现松开和夹紧螺杆。
59.当螺母200已经下锁至预定位置,且螺母200已经调整好平行度时,抵压气缸192的抵压气缸192头伸出,将螺母200顶住,避免螺母200由于震动而自由向下旋转或向上旋转,导致螺母200偏移预定下锁预定位置,以为偏移平行度预定位置。当螺母200还未到预定位置或者螺杆需要旋转180
°
时,抵压气缸192的抵压气缸192头缩收,远离螺杆,避免因靠螺杆太近影响其他工序的操作。
60.当螺杆被送至工装191位需要工装191夹紧时,抵压驱动件195驱动抵压块194相对边框193远离的运动,使得螺杆进入槽口196能够顺畅,不会抵到边框193或者抵压块194。当螺杆已放入槽口196后,抵压驱动件195 驱动抵压块194靠近边框193,直至抵压块194与边框193配合将螺杆夹紧与槽口196中。当螺杆需要旋转180
°
时,抵压驱动件195驱动抵压块194 远离边框193。等待螺杆旋转180
°
后,重新需要工装191夹紧螺杆时,抵压驱动件195驱动抵压块194相对边框193远离的运动,使得螺杆进入槽口 196能够顺畅,不会抵到边框193或者抵压块194。当螺杆已放入槽口196 后,抵压驱动件195驱动抵压块194靠近边框193,直至抵压块194与边框 193配合将螺杆夹紧与槽口196中。
61.具备缓冲的螺母组装装置还包括输送机构和顶出机构180。机械手100 在吸取螺母200状态时,输送机构能够将螺母200将螺母200输送至机械手 100和顶出机构180中间位置,顶出机构180设置于输送机构输出末端的正下方位置,机械手100设置于顶出机构180正上方位置;机械手100能够上下前后移动至组装位置,在组装位置时,机械手100设置于螺杆的正上方。顶出机构180将螺母200从输送机构中顶出,机械手100能够吸取螺母200 并在组装位置上将螺母200组装到螺杆上,机械手100内设置有能够容置螺杆的空间。
62.参见图1,在另一实施例中,输送机构包括振动盘171、输送轨道172、直振器178和第一感应器179。振动盘171的输出端与输送轨道172连接,螺母200在振动盘171中能够将无序的螺母200自动有序正面朝上地排列整齐、输送至输送轨道172上;直振器178设置于输送轨道172下方,直振器 178为输送轨道172上的螺母200提供动力,让螺母200能够在输送轨道172 上往前运动;第一感应器179设置于输送轨道172上方,能够检测输送轨道 172上的螺母200是否正面朝上。
63.输送轨道172包括输送结构173和输出结构174。输送结构173与振动盘171连接,接收振动盘171输送过来的螺母200,输送结构173与直振器 178连接,能够将螺母200继续往前输送,输出结构174设置于输送结构173 末端。
64.输出结构174包括底板175和压板176,底板175与输送结构173平行,能够接收输送过来的螺母200,螺母200能够进入底板175与压板176间形成的螺母槽中。压板176能够压住螺母200,避免因振动位置发生偏移,压板176的材质可以是具有弹性塑料材质,压板176开口小于螺母200的直径。底板175设置有孔位,通过压板176具有弹性且底板175的孔位,顶出机构180能够将螺母200从输出结构174中顶出,机械手100能够吸取顶出机构 180顶出的螺母200。
65.虽然在上述实施例中,螺母200能够进入底板175与压板176间形成的螺母槽中时,压板176能够压住螺母200。但本实用新型不限制于此:例如,压板176可以根据实际应用情况替换成对称两侧的弹性压片,或者将底板175 与输送结构173间隔0.05-0.2mm,使得螺母200进入螺母槽中时,不会因为直振器178的振动导致输送结构173的振动,而影响螺母槽中的螺母200,使螺母200能够稳定在螺母槽中。
66.在另一实施例中,顶出机构180包括夹爪181、两个第二感应器182以及驱动件180,夹爪181与驱动件180连接,驱动件180能够驱动夹爪181 开合和升降,两个第二感应器182的配合能够检测螺母200是否到位。
67.夹爪181设置于驱动件180的上方,夹爪181设置于输出结构174中孔位的正下方,夹爪181能够伸入所述螺母200的螺纹孔内,驱动件180的升降将夹爪181插入和脱离螺母200,驱动件180驱动夹爪181的开合能够让夹爪181夹紧和松开螺母200。两个第二感应器182分设于输出结构174两侧,输送结构173设有感应槽,螺母200进入螺母槽时,螺母200边缘占据感应槽,两个第二感应器182的检测信号能够通过输送结构173上的感应槽,检测螺母200是否到位。
68.虽然在上述实施例中,驱动件180驱动夹爪181的开合能够让夹爪181 夹紧和松开螺母200。但本实用新型不限制于此:例如,夹爪181能够根据实际应用情况替换成支撑杆,由驱动件180驱动支撑杆伸缩,支撑杆伸入螺母200一端沿端顶向端底的直径逐渐增大,支撑杆能够进入机械手100内容置螺杆的空间,不会影响机械手100的操作。
69.本实施例的一种具备缓冲的螺母组装装置的原理如下:
70.螺母200在振动盘171内经过筛选分类后,有序的正面朝上输送至输送轨道172。直振器178为输送轨道172提供动力,将输送轨道172上的螺母 200输送至顶出机构180的上方位置。螺母200输送过程中,第一感应器179 能够检测输送轨道172上的螺母200是否正面朝上,如果正面朝上则继续将螺母200往前输送。
71.当螺母200达到输出结构174时,第二感应器182能够检测到螺母200 已到位。顶出机构180启动,而输送机构停止输送螺母200,驱动件180驱动夹爪181上升至夹爪181伸入螺母200内,夹爪181张开夹紧螺母200,再继续上升至预定位置。
72.第二感应器182检测到螺母200已到位,启动了顶出机构180将螺母200 顶出,滑轨结构将机械手100移动至预定位置,取件结构110通过磁力件112 将螺母200吸取,旋转电机121启动,旋转至多半圈,使得螺母200完全进入套件111内固定。驱动件180驱动顶出机构180的夹爪181缩合,松开螺母200,并下降至初始位置。
73.取件结构110已将螺母200完全进入套件111内固定后,滑轨结构带动着机械手100向升起,并水平移动至组装位置后下降。达到预定位置后,旋转电机121启动,驱动旋转杆126上的取件结构110旋转,套件111带动螺母200在组装位置上进行螺母200与螺杆的组装,旋转结构120内嵌设的缓冲结构130,在此过程中能避免螺母200与螺杆卡死。当第三感应器161检测到螺母200已旋转到预定深度,停止旋转。第四感应器151启动,旋转电机121回转,当感应片152跟着旋转机构回转至感应槽中间位置时,即第四感应器151检测到螺母200回转至预定方向,旋转电机121停止旋转。
74.滑轨结构将机械手100移动至初始位置,输送机构继续输送螺母200,转盘190将装好螺母200的半成品转动至下一个工位。
75.应理解,以上描述的多个示例可沿多个方向(如倾斜、颠倒、水平、垂直,等等)并且以多个构造被利用,而不背离本实用新型的原理。附图中示出的实施例仅作为本实用新型的原理的有效应用的示例而被示出和描述,本实用新型并不限于这些实施例的任何具体的细节。
76.当然,一旦仔细考虑代表性实施例的以上描述,本领域技术人员就将容易理解,可对这些具体的实施例做出多种改型、添加、替代、删除以及其他变化,并且这些变化在本实用新型的原理的范围内。因此,前面的详细描述应被清楚地理解为是仅以说明和示例的方式来给出的,本实用新型的精神和范围仅由所附权利要求书及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1