一种钢结构电弧焊焊接工艺的制作方法
1.本发明涉及电弧焊技术领域,尤其涉及一种钢结构电弧焊焊接工艺。
背景技术:
2.电弧焊,是指以电弧作为热源,利用空气放电的物理现象,将电能转换为焊接所需的热能和机械能,从而达到连接金属的目的。主要方法有焊条电弧焊、埋弧焊、气体保护焊等,它是应用最广泛、最重要的熔焊方法,占焊接生产总量的60%以上。
3.焊条电弧焊是工业生产中应用最广泛的焊接方法,它的原理是利用电弧放电(俗称电弧燃烧)所产生的热量将焊条与工件互相熔化并在冷凝后形成焊缝,从而获得牢固接头的焊接过程。
4.目前在对钢结构进行焊接时,大多数依然采用人工进行焊接操作,不仅存在焊接劳动强大较大,且易引起焊接操作人员出现电光性眼炎和易致操作人员灼伤,造成身体损伤的问题,所以需要一种钢结构电弧焊焊接工艺。
技术实现要素:
5.基于现有的在对钢结构进行焊接时,采用人工进行焊接操作,不仅存在焊接劳动强大较大,且易引起焊接操作人员出现电光性眼炎和易致操作人员灼伤,造成身体损伤的技术问题,本发明提出了一种钢结构电弧焊焊接工艺。
6.本发明提出的一种钢结构电弧焊焊接工艺,包括以下步骤:
7.步骤一、焊接钢结构型材裁切,将需要焊接的钢结构型材,根据焊接需求进行裁切;
8.步骤二、型材处理,将裁切后的钢结构型材焊接位置,焊接坡口处理;
9.步骤三、表面清理清洁,对坡口处理后的焊接钢结构型材的表面进行清理清洁;
10.步骤四、焊接定位,将表面清理清洁后的钢结构型材,根据焊接需要,通过定位机构,将钢结构型材摆放到自动焊接装置内,进行定位固定;
11.步骤五、自动焊接,根据焊接型材的厚度,和焊接形状以及结构大小,对自动焊接装置进行程序设定;
12.步骤六、焊缝检测,建立对比分析数据库,对焊接后的钢结构焊缝进行检测;
13.步骤七、完成焊接,将在经过步骤六焊缝检测合格后的钢结构,从自动焊接装置内取出,完成焊接。
14.优选地,所述步骤四中定位机构包括金属定位板和定位角块,所述金属定位板固定安装在自动焊接装置内部,所述金属定位板的表面固定连接有隔热辅助片,多个所述隔热辅助片在金属定位板的均匀分布。
15.优选地,所述隔热辅助片的表面与金属定位板的表面设置有定位辅助槽,多个所述定位辅助槽在金属定位板的表面呈网格状分布。
16.优选地,所述定位角块的表面呈三角形状,多个所述定位角块与隔热辅助片的表
面滑动连接。
17.优选地,所述定位角块的表面固定开设有活动定位槽,所述活动定位槽的内壁固定开设定位孔,多个所述定位孔在活动定位槽的内底壁均匀分布。
18.优选地,所述定位孔的内壁滑动连接有定位磁铁针,所述定位磁铁针的表面呈t形状。
19.优选地,所述步骤四中自动焊接装置包括固定底板,所述固定底板的表面固定连接有焊接密封罩,所述焊接密封罩的表面固定开设有进出料槽,所述进出料槽的内壁铰接安装有密封门。
20.优选地,两个所述密封门以进出料槽的轴线为中心呈对称分布,所述密封门的表面设置有观察玻璃窗。
21.优选地,所述固定底板的上表面固定安装有直线导轨,所述直线导轨的表面滑动连接有移动滑块,所述移动滑块的表面固定安装有焊接机器人。
22.优选地,所述焊接机器人的一端分别固定安装有焊条电动夹头和图像采集相机,所述焊条电动夹头的表面夹持有焊条。
23.本发明中的有益效果为:
24.通过设置步骤四焊接定位和步骤五自动焊接,在对钢结构进行焊接时,通过定位角块与金属定位板配合,对焊接钢结构型材进行焊接定位,然后通过焊接机器人在直线导轨上运动,对钢结构进行自动焊接,并通过图像采集相机对钢结构焊缝进行图像采集,并进行对比分析检测,从而解决了现有的在对钢结构进行焊接时,采用人工进行焊接操作,不仅存在焊接劳动强大较大,且易引起焊接操作人员出现电光性眼炎和易致操作人员灼伤,造成身体损伤的问题。
附图说明
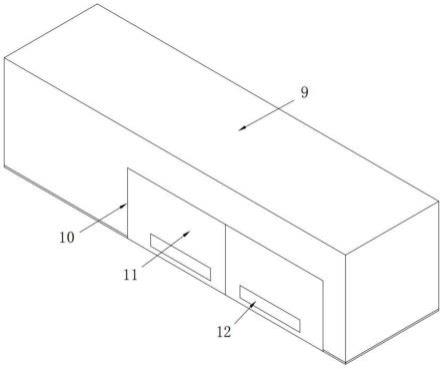
25.图1为本发明提出的一种钢结构电弧焊焊接工艺的示意图;
26.图2为本发明提出的一种钢结构电弧焊焊接工艺的固定底板结构立体图;
27.图3为本发明提出的一种钢结构电弧焊焊接工艺的图2中a处结构放大图;
28.图4为本发明提出的一种钢结构电弧焊焊接工艺的金属定位板结构立体图;
29.图5为本发明提出的一种钢结构电弧焊焊接工艺的焊接机器人结构立体图;
30.图6为本发明提出的一种钢结构电弧焊焊接工艺的定位角块结构剖视图。
31.图中:1、金属定位板;2、定位角块;3、隔热辅助片;4、定位辅助槽;5、活动定位槽;6、定位孔;7、定位磁铁针;8、固定底板;9、焊接密封罩;10、进出料槽;11、密封门;12、观察玻璃窗;13、直线导轨;14、移动滑块;15、焊接机器人;16、焊条电动夹头;17、图像采集相机。
具体实施方式
32.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
33.参照图1-6,一种钢结构电弧焊焊接工艺,包括以下步骤:
34.步骤一、焊接钢结构型材裁切,将需要焊接的钢结构型材,根据焊接需求进行裁切;
35.步骤二、型材处理,将裁切后的钢结构型材焊接位置,焊接坡口处理;
36.进一步地,坡口的作用是使焊条、焊丝或焊炬能直接伸入坡口底部以保证焊透,并有利于脱渣和便于焊条在坡口内作必要的摆动,以获得良好的熔合。
37.坡口的形状和尺寸主要取决于被焊材料及其规格,主要是厚度;以及采取的焊接方法、焊缝形式等。
38.在实际应用中常见的坡口型式主要包括下列形式:
39.弯边接头-适用于厚度《3mm的薄件;
40.平坡口-适用于3-8mm的较薄件;
41.v型坡口-适用于厚度6-20mm的工件,主要用于单面焊接;
42.x型坡口-适用于厚度12-40mm的工件,并有对称型与不对称型x坡口之分,主要用于双面焊接;
43.u型坡口-适用于厚度20-50mm的工件,主要用于单面焊接;
44.双u型坡口-适用于厚度30-80mm的工件,主要用于双面焊接。
45.坡口角度通常取60-70
°
,采用钝边的目的是防止焊件烧穿,而间隙则是为了便于焊透。
46.步骤三、表面清理清洁,对坡口处理后的焊接钢结构型材的表面进行清理清洁;
47.进一步地,在焊接前清理焊接表面,具有避免焊接坡口处的灰尘和杂质,影响电弧引燃和焊缝的质量。
48.步骤四、焊接定位,将表面清理清洁后的钢结构型材,根据焊接需要,通过定位机构,将钢结构型材摆放到自动焊接装置内,进行定位固定;
49.为了实现更好的自动焊接,步骤四中定位机构包括金属定位板1和定位角块2,金属定位板1固定安装在自动焊接装置内部,金属定位板1的表面固定连接有隔热辅助片3,多个隔热辅助片3在金属定位板1的均匀分布。
50.进一步地,隔热辅助片3不仅具有对焊接时,钢型材进行隔热,还具有便于通过多个隔热辅助片3形成辅助槽,便于定位的效果。
51.进一步地,隔热辅助片3采用陶瓷材料制备,从而不仅具有进行焊接隔热,还具有增加金属定位板1的耐磨性,增加定位机构的使用寿命的效果。
52.为了实现对钢结构型材进行精准定位焊接,在隔热辅助片3的表面与金属定位板1的表面设置有定位辅助槽4,多个定位辅助槽4在金属定位板1的表面呈网格状分布。
53.定位角块2的表面呈三角形状,多个定位角块2与隔热辅助片3的表面滑动连接。
54.定位角块2的表面固定开设有活动定位槽5,活动定位槽5的内壁固定开设定位孔6,多个定位孔6在活动定位槽5的内底壁均匀分布。
55.定位孔6的内壁滑动连接有定位磁铁针7,定位磁铁针7的表面呈t形状。
56.进一步地,定位磁铁针7的一端与定位辅助槽4的内壁插接,通过定位磁铁针7与定位辅助槽4的内壁插接,对定位角块2进行定位限位,从而对焊接钢结构型材进行定位限位,辅助焊接,还具有通过定位辅助槽4在焊接完成后,对同批次新的钢型材焊接时,进行定位辅助,便于自动焊接时焊接参数不需要再次调整和设置的效果。
57.步骤五、自动焊接,根据焊接型材的厚度,和焊接形状以及结构大小,对自动焊接装置进行程序设定;
58.为了实现对钢结构进行自动焊接,步骤四中自动焊接装置包括固定底板8,固定底板8的表面固定连接有焊接密封罩9,焊接密封罩9的表面固定开设有进出料槽10,进出料槽10的内壁铰接安装有密封门11。
59.进一步地,为了实现对钢结构进行焊接,在固定底板8的固定安装有导电柱,导电柱上通过电线电性连接有接地夹,在实际焊接时,接地夹在钢结构的表面。
60.进一步地,通过设置焊接密封罩9,和密封门11,在焊接时,具有对焊接过程中产生的气体和烟尘进行密封,防止焊接过程中产生的有害气体和烟尘飘散到空气中,造成空气污染,和被焊接操作人员吸入,影响焊接操作人员身体健康的特点。
61.两个密封门11以进出料槽10的轴线为中心呈对称分布,密封门11的表面设置有观察玻璃窗12。
62.进一步地,观察玻璃窗12采用深色玻璃,从而具有便于通过玻璃窗观察焊接时,对观察人员的眼睛进行防光辐射保护的效果。
63.固定底板8的上表面固定安装有直线导轨13,直线导轨13的表面滑动连接有移动滑块14,移动滑块14的表面固定安装有焊接机器人15。
64.进一步地,在本实施例中,移动滑块14通过丝杆和驱动电机配合进行驱动,在直线导轨13的表面进行直线移动运动,从而带动焊接机器人15进行运动焊接。
65.为了实现在焊接时,自动夹取焊条和对焊接后的钢结构焊缝进行检测,在焊接机器人15的一端分别固定安装有焊条电动夹头16和图像采集相机17,焊条电动夹头16的表面夹持有焊条。
66.进一步地,焊条电动夹头16的型号采用但不限于bfjh-a2-4/5/6,后拉式内撑夹头精密内涨夹具,并在实际焊接使用过程中,可根据焊条的实际型号,对焊条电动夹头16进行定制,从而达到更好的对焊条进行夹紧焊接的效果。
67.进一步地,在实际使用过程中,焊接机器人15的表面固定安装有烟气处理管,烟气处理管的一端靠近焊条,并将烟气处理管与烟气处理设备连接,从而便于在焊接过程中,对焊条焊接时产生的烟气进行处理的效果。
68.进一步地,图像分析一般利用数学模型并结合图像处理的技术来分析底层特征和上层结构,从而提取具有一定智能性的信息。图像分析更侧重点在于研究图像的内容,包括但不局限于使用图像处理的各种技术,它更倾向于对图像内容的分析、解释和识别。图像分析的主要过程为:输入、分割、识别、解释。
69.具体地,输入为把实际物景转换为适合计算机处理的表达形式,对于三维物景也是把它转换成二维平面图像进行处理和分析。
70.分割为从物景图像中分解出物体和它的组成部分。组成部分又由图像基元构成。把物景分解成这样一种分级构造,需要应用关于物景中对象的知识。一般可以把分割看成是一个决策过程,它的算法可分为像点技术和区域技术两类。像点技术是用阈值方法对各个像点进行分类,例如通过像点灰度和阈值的比较求出文字图像中的笔划。区域技术是利用纹理、局部地区灰度对比度等特征检出边界、线条、区域等,并用区域生长、合并、分解等技术求出图像的各个组成成分。此外,为了进一步考察图像整体在分割中的作用,还研究出松弛技术等方法。
71.识别为对图像中分割出来的物体给以相应的名称,如自然物景中的道路、桥梁、建
筑物或工业自动装配线上的各种机器零件等。一般可以根据形状和灰度信息用决策理论和结构方法进行分类,也可以构造一系列已知物体的图像模型,把要识别的对象与各个图像模型进行匹配和比较。
72.解释为用启发式方法或人机交互技术结合识别方法建立物景的分级构造,说明物景中有些什么物体,物体之间存在什么关系。在三维物景的情况下,可以利用物景的各种已知信息和物景中各个对象相互间的制约关系的知识。例如,从二维图像中的灰度阴影、纹理变化、表面轮廓线形状等推断出三维物景的表面走向;也可根据测距资料,或从几个不同角度的二维图像进行景深的计算,得出三维物景的描述和解释。
73.进一步地,在本实施例中,图像采集相机17通过数据线与计算机连接,在焊接过程中,通过图像采集相机17对钢结构焊缝进行拍照采集,并将数据上传到计算机中,通过计算机中的对比分析软件程序,对采集的图像与数据库中的焊缝图像进行对比分析,并生成对比分析报告。
74.步骤六、焊缝检测,建立对比分析数据库,对焊接后的钢结构焊缝进行检测;
75.步骤七、完成焊接,将在经过步骤六焊缝检测合格后的钢结构,从自动焊接装置内取出,完成焊接。
76.通过设置步骤四焊接定位和步骤五自动焊接,在对钢结构进行焊接时,通过定位角块2与金属定位板1配合,对焊接钢结构型材进行焊接定位,然后通过焊接机器人15在直线导轨13上运动,对钢结构进行自动焊接,并通过图像采集相机17对钢结构焊缝进行图像采集,并进行对比分析检测,从而解决了现有的在对钢结构进行焊接时,采用人工进行焊接操作,不仅存在焊接劳动强大较大,且易引起焊接操作人员出现电光性眼炎和易致操作人员灼伤,造成身体损伤的问题。
77.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1