一种全自动上下料的多通道加工机床的制作方法
1.本发明涉及加工设备领域,尤其涉及一种全自动上下料的多通道加工机床。
背景技术:
2.随着加工机床的不断研发改进,在目前的机械行业中,已经逐步出现多主轴多通道的加工设备,如发明人于2019年09月03日公开的授权公告号cn109015071 b的并行多通道数控机床,发明人在该数控机床的使用过程中发现,工人或机床操作者需要自行将工件装夹到机床的工作台上,一定程度上仍然影响到加工效率。
技术实现要素:
3.为了克服上述现有技术所述的至少一种缺陷,本发明提供一种全自动上下料的多通道加工机床,实现工件从上料、定位及加工过程全自动的目的,从而进一步提高机床的工作效率。
4.本发明为解决其问题所采用的技术方案是:
5.一种全自动上下料的多通道加工机床,包括:
6.自动上下料装置,用于工件的存放及定位;
7.若干运送装置,每个所述运送装置的驱动端上均具备有工作台;
8.送料机械手,用于所述自动上下料装置与所述工作台之间工件的夹持传送;
9.垂直于所述驱动端的运送方向上设置有至少一个固定梁,至少一个所述固定梁的两相对侧上分别活动装配有加工模块;
10.所述自动上下料装置上的工件经所述送料机械手至每一所述工作台上,再沿着所述驱动端的运送方向顺次经每一所述加工模块进行加工。
11.因此,经由送料机械手进行对已存放在自动上下料装置中的工件进行自动夹取、定位并传送装夹至工作台上,代替了传统现有由人工进行逐一装夹定位所带来的效率低下的问题,进一步提高了机床的自动化程度,同时,通过自动上下装置的定位及送料机械手的精准运送,有效保证了工件的定位精度。进一步的,通过两个加工模块及两个运送装置之间的相互配合,不仅有效避免将工件在完成不同工序的加工过程中需从其中一工作台重新装夹至另一工作台上的动作,避免了重新装夹带来的重复定位的问题,进而有效保证了每一工件的定位精度及工件的加工精度,而且使得机床整个加工运作过程更加连贯,显然有效地提高了工作效率,此外,加工模块分置在固定梁两侧,使得该机床的结构更加稳定,受力更加匀称,非常有利于对工件的稳定加工,从而进一步提高工件的加工精度。
12.进一步地,所述自动上下料装置包括用于存放未加工工件的储料部,及用于存放已加工工件的成品部。
13.进一步地,所述自动上下料装置还包括定位部,用以对工件进行校正、定位,进而保证自动装夹在工作台上的工件的定位精度,有效的保证工件的加工精度的目的。
14.进一步地,所述送料机械手包括设置在所述储料部与若干所述运送装置之间的上
料机械手,以及设置在所述成品部与若干所述运送装置之间的下料机械手。
15.进一步地,沿着所述驱动端的运送方向上依次设置有若干个所述固定梁,且每个所述运送装置均贯穿若干个所述固定梁,每个所述固定梁的两相对侧上均装配有所述加工模块,所述驱动端带动对应所述工作台经每一所述固定梁上的加工模块进行加工。
16.进一步地,所述固定梁的两相对侧上分别安装固定有移动装置,两个加工模块分别对应装配于两个所述移动装置的执行端上,利用移动装置实现两个加工模块均能在固定梁上往复滑动的动作,进而实现两个加工模块均能在若干个运送装置之间往复移动的目的。
17.进一步地,所述加工模块包括至少一个推进装置,以及活动装配在所述推进装置上的加工主轴。
18.进一步地,两个所述加工模块之间还设置有用以分离切削介质的隔挡结构。
19.进一步地,每个所述工作台上均具备有与每个所述加工模块的至少一所述加工主轴相对应的工位区。
20.进一步地,该全自动上下料的多通道加工机床还包括床身,所述固定梁固定安装在所述床身上,若干所述运送装置均固定安装在所述床身上。
21.综上所述,本发明提供的一种全自动上下料的多通道加工机床,具有如下技术效果:
22.1、利用自动上下料装置及送料机械手的配合,实现了机床自动将工件运送并装夹至工作台的目的,并在装夹至工作台前完成工件的定位校正,从而保证了后续工件在加工过程中的定位精度。
23.2、通过两个独立并相对设置在固定梁两侧的加工模块,实现工件在无需二次定位的前提下完成不同工序的顺次加工。
24.3、通过两加工模块及多个运送装置的配合使用,实现不同加工模块对不同运送装置上的工件进行不同批次工件的同时加工的目的,有效地提高了机床的工作效率。
附图说明
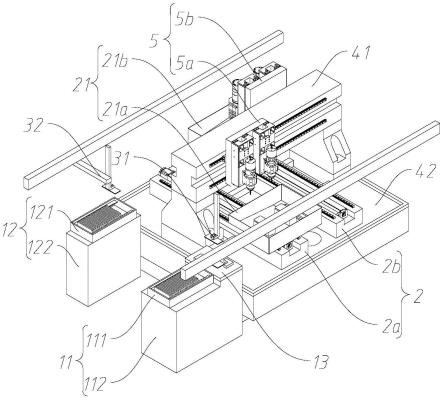
25.图1为本发明全自动上下料的多通道加工机床的第一整体结构图;
26.图2为本发明全自动上下料的多通道加工机床的第二整体结构图;
27.图3为本发明全自动上下料的多通道加工机床的第三整体结构图;
28.图4为本发明全自动上下料的多通道加工机床的第四整体结构图;
29.图5为本发明全自动上下料的多通道加工机床的部分爆炸示意图;
30.图6为本发明该多通道加工机床中储料部及定位部的结构示意图;
31.图7为本发明该多通道加工机床中运送装置的结构示意图。
32.图标:1-自动上下料装置,11-储料部,111-储料槽,112-第一物料台,12-成品部,121-成品槽,122-第二物料台,13-定位部,2-运送装置,2a-第一运送装置,2b-第二运送装置,21-工作台,21a-第一加工台,21b-第二加工台,22-工位区,23-固定座,24-运送导轨,25-运送滑块,3-送料机械手,31-上料机械手,32-下料机械手,41-固定梁,42-床身,5-加工模块,5a-第一加工模块,5b-第二加工模块,51-推进装置,511-推进滑座,512-推进导轨,513-推进滑块,52-加工主轴,6-移动装置,61-移动座,62-移动导轨,63-移动滑块。
具体实施方式
33.为了更好地理解和实施,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述。
34.在本发明的描述中,需要说明的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
35.除非另有定义,本文所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。本文中在本发明的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在限制本发明。
36.图1为全自动上下料的多通道加工机床的第一整体结构图,图7为了全自动上下料的多通道加工机床中运送装置2的结构示意图,其中,为清楚展示运送滑块25的结构,未对工作台21及工位区22进行示意,具体请结合图1及图7所示,本发明公开了一种全自动上下料的多通道加工机床,包括:
37.自动上下料装置1,用于工件的存放及定位;
38.若干运送装置2,每个运送装置2的驱动端上均具备有工作台21;
39.送料机械手3,用于自动上下料装置1与工作台21之间工件的夹持传送;
40.垂直于驱动端的运送方向上设置有至少一个固定梁41,至少一个固定梁41的两相对侧上分别活动装配有加工模块5,其中,加工模块5的活动方向垂直于驱动端的运送方向,加工模块5用以对工件的铣削粗加工,铣削精加工,磨削加工,钻孔加工等等;
41.自动上下料装置1上的工件经送料机械手3至每一工作台21上,再沿着驱动端的运送方向顺次经每一加工模块5进行加工。
42.应当注意,自动上下料装置1、送料机械手3、两个加工模块5及若干运送装置2均与多通道加工机床的控制系统电连接,保证自工件的上料、定位、加工及下料的过程统一检测、控制。
43.在本实施例中,工人或机床操作者仅需将未经加工的工件放置至在自动上下料装置1上,随即控制系统发送控制指令至送料机械手3,使其夹持工件在自动上下料装置1上进行定位,经校正、定位后的工件再次由送料机械手3进行夹持后传送至工作台21,将工件装夹至工作台21上后,控制系统将及时发送指令至运送装置2,使得工作台21运送至加工模块5下进行加工,同步的,送料机械手3复位至自动上下料装置1夹持、运送第二个工件。
44.为清楚地描述上述该机床加工中的巧妙而核心的工作原理,此处,图5示出了该全自动上下料的多通道加工机床中推进装置51、加工主轴52及移动装置6的爆炸示意图,并结合图1所示,该多通道加工机床以双通道加工机床为例,即运送装置2配置为两个,其中,靠近自动上下料装置1一侧的定义为第一运送装置2a,则远离自动上下料装置1一侧的定义为第二运送装置2b,对应的,第一运送装置2a上的工作台21为第一加工台21a,第二运送装置2b上的工作台21为第二加工台21b,此外,固定梁41与自动上下料装置1同一侧的加工模块5定义为第一加工模块5a,用于铣削加工,则固定梁41另一侧的加工模块5定义为第二加工模块5b,用于磨削加工,首块进行加工的工件定义为第一工件,第二块进行加工的工件定义为第二工件,第三块进行加工的工件定义为第三工件,则送料机械手3将工件装夹至工作台
21,并通过运送装置2运送至加工模块5下加工的具体运作原理如下:
45.步骤s1,第一工件的铣削加工及第二工件的夹持运送:
46.s11,送料机械手3将第一工件装夹于第一加工台21a后,启动第一运送装置2a,以使得第一加工台21a运送至第一加工模块5a垂直投影在第一运送装置2a的加工位置内,第一加工模块5a对第一工件进行加工;
47.s12,送料机械手3将第一工件装夹至第一加工台21a,且第一工件进行步骤s11的过程中,送料机械手3复位至自动上下料装置1,完成第二工件的定位、运送及装夹至第二加工台21b上;
48.步骤s2,第一工件的磨削加工及第二工件的铣削加工:
49.步骤s21,第一加工模块5a完成第一工件的铣削加工后,第一运送装置2a再次启动,将第一加工台21a运送至固定梁41的另一侧,同步的,第二加工模块5b移动至第一运送装置2a的上方,直至第一加工台21a运送至第二加工模块5b垂直投影在第一运送装置2a的加工位置内,第二加工模块5b对第一工件进行加工;
50.步骤s22,待第一加工模块5a完成第一工件的铣削加工后,第二运送装置2b启动,驱使第二加工台21b朝固定梁41的方向运送,同步的,第一加工模块5a移动至第二运送装置2b的上方,直至第二加工台21b运送至第一加工模块5a垂直投影在第二运送装置2b的加工位置内,第一加工模块5a对第二工件进行加工;
51.步骤s3,第一工件的工序完毕及第二工件的磨削加工:
52.步骤s31,第二加工模块5b完成第一工件的磨削加工后,送料机械手3将装夹在第一加工台21a上的第一工件卸下取走,则第一工件的加工工序完毕;
53.步骤s32,启动第一运送装置2a,使得第一加工台21a复位至初步设定的位置,通过送料机械手3进行装夹第三工件,同步的,第二加工模块5b预先移动至第二运送装置2b的上方;
54.步骤s33,第一加工模块5a完成第二工件的铣削加工后,第一加工模块5a复位至第一运送装置2a的上方,并循环上述步骤,同步的,第二运送装置2b再次启动,将第二加工台21b运送至固定梁41的另一侧,直至第二加工台21b运送至第二加工模块5b垂直投影在第二运送装置2b的加工位置内,第二加工模块5b对第二工件进行加工。
55.在上述步骤s22及步骤s31中,也即第一工件进行磨削加工及第二工件进行洗削加工的过程中,送料机械手3将继续复位至自动上下料装置1进行夹持第三工件进行定位、运送,以预备多通道加工机床进入到步骤s32后将第三工件装夹至第一加工台21a。
56.结合上述多通道加工机床的工作原理可知,工件自放置在自动上下料装置1后,通过自动上下料装置1与送料机械手3的配合,实现将工件自动上料、装夹至运送装置2的工作台21上的目的,在自动上料的过程中,经自动上下料装置1对工件进行自动校正定位,消除工件在放置过程中定位不准确的问题,则再由送料机械手3已定位后的工件夹持并运送至工作台21时,装夹在工作台21上的工件的定位准确无误。
57.此外,定位准确无误的工件装夹在工作台21上,沿着运送装置2的运送方向即可完成两个加工模块5的两道工序的加工,无需进行重新二次装夹的定位,从而保证了工件的加工精度及定位精度。更重要的,结合上述工作原理可知,两个加工模块5在两个运送装置2之间往复运动并交替加工,不仅有效避免将工件从其中一工作台21重新装夹至另一工作台21
上的动作,避免了重新装夹带来的重复定位的问题,进而有效保证了每一工件的定位精度及工件的加工精度,而且,配合运送装置2的往复运送,使得加工运作更加连贯,显然有效地提高了工作效率,此外,加工模块5分置在固定梁41两侧,使得该机床的结构更加稳定,受力更加匀称,非常有利于对工件的稳定加工,从而进一步提高工件的加工精度。
58.应当说明,该多通道加工机床多加工可包含三道及三道以上的加工,根据加工工序及机械设计方案的需要,固定梁41可以设置为多个,也即沿着驱动端的运送方向上依次设置有若干个固定梁41,且每个运送装置2均贯穿若干个固定梁41,每个固定梁41的两相对侧上均装配有加工模块5,驱动端带动对应工作台21经每一固定梁41上的加工模块5进行加工。工件随着工作台21的运送,逐一经过每个加工模块5的加工,从而实现该多通道加工机床三道及三通以上的多工序加工的目的。
59.在本实施例中,结合图7所示,运送装置2包括固定座23、运送导轨24及滑动装配于运送导轨24的运送滑块25,其中,运送滑块25为运送装置2的驱动端,运送导轨24固定连接于固定座23,工作台21固定连接运送滑块25,则工作台21在运送滑块25的作用下,沿着运送导轨24的长度方向上往复直线滑动,此处,运送导轨24的长度方向即为驱动端的运送方向,从而实现运送工件至加工模块5进行加工的目的。
60.为实现上述自动上下料装置1的工件存放的功能,如图5示出全自动上下料的多通道加工机床中储料部11及定位部13的结构示意图,并结合图1所示,自动上下料装置1包括用于存放未加工工件的储料部11,及用于存放已加工工件的成品部12,储料部11及成品部12均设置于若干运送装置2的一侧。优选的,储料部11为设置有一个储料槽111的第一物料台112,成品部12为设置有一个成品槽121的第二物料台122,储料部11与成品部12分置在相对于固定梁41的两侧,则从储料部11上夹取未加工工件装夹到工作台21上后,沿着运送装置2进行两个加工模块5的加工处理后,从另一侧卸下已完成加工工件并放置到成品部12内,节省拆装的时间,从而提高了多通道加工机床的工作效率。
61.根据上述优选方案,如图2示出了全自动上下料的多通道加工机床的第二整体结构图,并结合图1所示,送料机械手3包括设置在储料部11与若干运送装置2之间的上料机械手31,以及设置在成品部12与若干运送装置2之间的下料机械手32。上料机械手31及下料机械手32分别位于固定梁41的相对两侧,其中,上料机械手31滑动于储料部11与若干运送装置2之间,以将储料部11中的未加工工件运送至运送装置2的工作台21上,下料机械手32滑动于成品部12与若干运送装置2之间,以将工作台21上已完成加工工件运送至成品部12中。
62.在上述中,并不局限于第一物料台112设置一个储料槽111,第二物料台122设置一个成品槽121,具体请结合图2所示,储料部11的第一物料台112还可以设置两个储料槽111,当然,还可以三个及三个以上数目的储料槽111,同理的,成品部12的第二物料台122还可以设置两个成品槽121,还可以三个及三个以上的数目的成品槽121。对应的,储料部11与运送装置2之间可配置多个上料机械手31,以达到同步地从多个储料槽111中夹持多个未加工工件装夹到工作台21上,成品部12与运送装置2之间也可设置多个下料机械手32,以达到同步地工作台21上卸下已完成加工工件并夹持运送至多个成品槽121中。
63.除此外,也不局限于储料部11与成品部12分置在相对于固定梁41两侧的优选方式,具体请参阅图3示出的全自动上下料的多通道加工机床的第三整体结构图,还可以储料部11与成品部12均位于固定梁41的同一侧,且分别设置在若干运送装置2的相对两侧,则工
件沿着运送装置2的运送方向经每个加工模块5的加工处理后,已完成加工工件随着工作台21复位,下料机械手32先将工件卸下,随后上料机械手31及时将未加工工件装配至工作台21上,进行下一个工件的加工。
64.当然,具体请参阅图4示出的全自动上下料的多通道加工机床的第四整体结构图,还可以为储料槽111及成品槽121均设置在第一物料台112上,也即储料部11及成品部12均设置在同一位置处。
65.进一步的,为实现上述自动上下料装置1的工件定位的功能,具体请结合图1至图4以及图6所示,自动上下料装置1还包括用于工件校正定位的定位部13,其中,定位部13优选公告授权号“cn210649552u”所公开的“具有缓冲机构的夹具定位组件以及工件定位机构”,进而实现对工件在x轴及y轴上的精准校正,完成位置的高精度定位的过程,从而保证后续装夹至工作台21上的定位,进而保证了工件在加工过程中的定位精度。
66.具体的,具体请结合图5所示,固定梁41的两相对侧上分别安装固定有移动装置6,两个加工模块5分别对应装配于两个移动装置6的执行端上。具体的,移动装置6包括移动座61、移动导轨62及滑动装配于移动导轨62的移动滑块63,其中,移动座61作为移动装置6的执行端,移动导轨62垂直于运送装置2设置,也即为移动导轨62投影至运送装置2的同一平面内时,移动导轨62与运送装置2相互垂直,且移动导轨62固定连接在固定梁41上,移动座61固定连接移动滑块63,且加工模块5固定连接移动座61。利用移动装置6实现两个加工模块5均能在固定梁41上往复滑动的动作,进而实现两个加工模块5均能在若干个运送装置2之间往复移动的目的。
67.具体的,具体请结合图5所示,加工模块5包括至少一个推进装置51,以及活动装配在推进装置51上的加工主轴52。具体的,推进装置51包括推进滑座511、安装固定在移动座61上的推进导轨512及滑动装配于推进导轨512的推进滑块513,推进滑块513固定连接推进滑座511,且加工主轴52固定连接推进滑座511,则当加工模块5执行加工操作时,推进装置51向下推送加工主轴52,而当加工模块5完成加工操作时,推进装置51向上抬升复位,使加工主轴52远离工作台21及工件。其中,加工主轴5242为铣刀主轴、磨刀主轴、钻刀主轴等,以满足工件不同工序的加工。
68.具体的,请结合图1至图4所示,每个工作台21上均具备有与每个加工模块5的至少一加工主轴52相对应的工位区22。也即每个加工模块5中具有两个加工主轴52,则对应的,工作台21上设置有两个与两个加工主轴52相对应的工位区22,在两个工位区22上装夹两个工件,则加工模块5的两个加工主轴52同时下降至工作台21进行作业时,两个加工主轴52同步的对两个工位区22的两个工件进行加工。
69.具体的,请参阅图1至图4所示,该全自动上下料的多通道加工机床还包括床身42,固定梁41固定安装在床身42上,若干运送装置2均固定安装在床身42上。
70.在机械切削过程中,由于切削加工过程中需要供应切削介质(切削液),以对刀具在加工工件过程中进行冷却、润滑,而上述两个加工模块5分开设置在固定梁41的相对两侧,利用固定梁41的宽度所产生的间距,也将产生作用在两个加工模块5上的切削液进行分离的意想不到效果,达到作用在两个加工模块5上的切削液互不混合、互不影响的目的,但当刀具转速较高、或刀具与工件之间相互作用时,仍难以保证加工模块5飞溅出切削液不会飞溅进入到另一个加工模块5中,兹就该小瑕疵,发明人提供了一个更佳的改善方案:
71.更进一步的,为保证了作用在两个加工模块5上的切削介质分离,两个加工模块5之间还设置用以分离切削介质的隔挡结构。优选的,每个加工模板的底部分别设置有隔挡板或隔挡槽,除此优选的方案外,还可在两个加工模块5之间的固定梁41上装配有隔挡板,则切削介质在离心力的作用下飞溅到隔挡结构后,将无法运动到另一侧的加工模块5上,从而不会影响到另一次切削加工的冷却润滑及加工质量,进一步有效地保证了两个加工模块5之间的切削介质的分离作用,在隔档结构上还配置有清洁组件,进而便于加工模块5在对工件进行加工后对工作台21残留的切削液进行清除清洁,同时,也进一步避免了作用在两个加工模块5的切削液切削介质在长时间加工而导致混合的问题。
72.本发明方案所公开的技术手段不仅限于上述实施方式所公开的技术手段,还包括由以上技术特征任意组合所组成的技术方案。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1