一种双工位可批量翻转的管材激光切割设备的制作方法
1.发明属于激光切割技术领域,具体涉及一种双工位可批量翻转的管材激光切割设备。
背景技术:
2.激光切割是采用激光束照射到物体表面时释放的能量来使物体熔化并蒸发;激光切割无毛刺、皱折,而且精准度高,加工效率高、易实现加工过程的自动化等特点,因而成为管材加工的主要方法。
3.目前,管材激光切割设备通常为单工位,单个操作工操作的形式,在面的大批量管材切割时不能够多个管材同时进行切割,降低切割效率,同时有些管材需要进行四面多个孔位进行切割,现有的设备虽然能够进行切割,但是在对大批量切割时,由于管材不是笔直的略有弯曲,如果管材固定不牢会导致切割出现偏差,同时不易对管材进行翻转,也不能保证切割效率。
4.因此,针对上述设备无法进行双工位批量进行翻转切割的问题,亟需得到解决,以改善设备的使用场景。
技术实现要素:
5.(1)要解决的技术问题针对现有技术的不足,发明的目的在于提供一种双工位可批量翻转的管材激光切割设备,该切割设备旨在解决现有技术下无法进行双工位批量进行翻转切割的技术问题。
6.(2)技术方案为了解决上述技术问题,发明提供了这样一种双工位可批量翻转的管材激光切割设备,该切割设备包括机体、设置于所述机体左端顶部用于左右移动的x轴驱动部件、设置于所述x轴驱动部件上用于支撑移动的支撑箱、设置于所述支撑箱之间用于前后移动的y轴驱动部件、设置于所述y轴驱动部件上用于操控切割的操控箱、设置于所述操控箱的左侧用于上下移动的z轴驱动部件、设置于所述z轴驱动部件的左侧用于切割的激光切割头;所述机体的左端和右端分别设有用于固定的首座和尾座,所述首座的后端内部设有用于驱动的传动链驱动箱,所述机体的后侧内部和前侧内壁对称设有用于导向的第一滑道和第二滑道,所述第一滑道和第二滑道上设有两个用于批量加工的工位组件,两个所述工位组件的后端设有用于带动工位组件往复运动的传动链,且传动链与传动链驱动箱的内部传动连接。
7.使用本技术方案的切割设备时,将定位销从定位孔内取出,根据管材的长度推动连接管,使连接管带动其底端中部、两侧的承载块和加持组件在滑块的导向下滑动在导轨上,当调节至合适位置后,将定位销插入定位孔内;然后将多个管材依次放入相邻限位板之间,此时管材的两端底部与中间的固定板的内底壁接触,且不与两侧固定板的内底壁接触,随后将移动管材的一端使之套在方型块的外部,完后通过外部控制器控制三个夹持组件上
的第一气缸同时向前运动,使第一气缸带动相对应的固定板向前运动,同时固定板的另一端在连接块内向前滑动,使限位板与管材的一侧接触,随后控制三个夹持组件上的第二气缸向后运动,使相对应的固定板带动限位板向后运动并与管材的另一侧接触,完成轴向定位;然后控制第三气缸启动并通过第一l型板推动移动板在导向槽内运动,移动板带动第二l型板和弹性组件向管材运动,最终使弹性组件与管材的另一端接触,同时弧型塞与管材的另一端开口抵触时,弧型塞受到挤压并带动圆杆向右运动,同时弧型塞压缩弹簧,使得弧型塞能够对管材进行横线限位;随后,通过外部控制器控制传动链驱动箱驱动传动链运动,使得传动链带动两个底架在第一滑道和第二滑道上反向运动,使装有管材的工位组件位于激光切割头的下方等待切割;通过设置外部控制器使激光切割头在x轴驱动部件、支撑箱、y轴驱动部件和z轴驱动部件的带动下进行x方向、y方向和z方向运动,从而能够对管材进行精准切割;当一组工位组件上的管材切割时,可以按上述流程将管材放置在另一组工位组件上,等待切割;当需要对管材进行翻转时,由外部控制器控制激光切割头复位,并控制第一气缸和第二气缸复位,使管材轴向失去限位,然后外部控制器控制伸缩气缸向下运动,使中间的固定板进入支撑块的内部,使管材处于悬空状态,此时外部控制器控制伺服电机转动,伺服电机带动其上的转轴转动,使得转轴同时带动其上的方型块和齿轮转动,同时其上的齿轮通过链条带动其它的齿轮转动,其他齿轮带动其上的转轴转动,从而使其它的方型块能够同步转动,使管材能够同时转动,同时管材的另一端能够通过弧型塞带动圆杆和螺母堵头转动,实现多个管材同步翻转;通过设置第一滑道、第二滑道、传动链和两个工位组件,传动链带动两个底架在第一滑道和第二滑道上反向运动,多个限位板之间能够容纳多个管材,同时第一气缸和第二气缸能够反向运动,并带动固定板和限位板对管材的两侧进行限位,使管材的轴向得到限位,同时方型块插进管材的一端,第三气缸能够通过连接组件带动弹性组件对管材的另一端进行限位,从而对管材的横向进行限位,不仅能够对管材进行批量切割,而且避免切割时由于管材弯曲造成切割不准确,提高切割效率;通过伺服电机、转轴、方型块、齿轮、链条和弹性组件的配合使用,伺服电机能够带动其中一个转轴转动,在链条和齿轮相互啮合的作用下,使其它齿轮能够带动相对应的转轴同步转动,从而使方型块能够带动其上的管材同步转动,并在弹性组件的作用下,能够使管材稳固顺畅的翻转,提高切割效率;通过导轨、z型板和定位销的设置,可以将抵接组件和加持组件进行移动同时带动z型板移动,移动至合适位置后将定位销插进定位孔内进行定位,使该设备能够适用不同长度的管材,适用性好。
8.优选地,所述机体的后侧内壁设有多个用于对传动链进行导向的导向盒,所述传动链设于导向盒的内部。通过导向盒的设置,在传动链运动时,传动链能够在导向盒内滑动,避免传动链下坠影响传动。
9.进一步的,两个所述工位组件均包括用于支撑的底架、所述底架的两侧下表面均设有用于与第一滑道和第二滑道呈滑动连接的导向柱,所述底架的顶部对称设有三个用于导向的导轨。通过第一滑道和第二滑道的设置,使得两个工位组件能够通过传动链的带动反向滑动在其上,实现双工位交替切割。
10.更进一步的,所述底架的顶部设有三个用于对管材进行轴向限位的夹持组件,三个所述夹持组件均包括用于安装伸缩气缸的安装箱、安装箱的两侧设有用于驱动的第一气缸和第二气缸、安装箱相对的一侧设有用于滑动支撑的连接块和三个用于夹持多个管材的
限位组件,所述连接块的内部设有用于升降的伸缩气缸。三个夹持组件能够对管件进行支撑和夹持,第一气缸和第二气缸驱动相对应的限位组件前后反向运动,升降气缸能够驱动中间限位组件进行上下运动。
11.更进一步的,三个所述限位组件均包括用于导向和支撑的固定板,所述固定板的上表面设有多个用于与管材侧壁接触的限位板,多个所述限位板呈等间距分布,中间所述固定板的厚度大于另外两个固定板的厚度,三个所述固定板的一端分别与第一气缸的输出端、第二气缸的输出端和伸缩气缸的输出端固定,三个所述固定板的另一端均滑动连接在连接块的内部,所述底架的顶端中部设有用于对固定板进行支撑导向的支撑块,左右所述限位组件的下方均设有运动导向的滑动块,且滑动块的顶端结构与支撑块的顶端结构相同,所述滑动块的底端设于导轨内。通过固定板和限位板的设置能够在第一气缸和第二气缸的带动下进行移动,使限位板能够对管件的侧壁进行夹持。
12.更进一步的,右侧所述导轨上设有用于对管材横向限位的抵接组件,所述抵接组件包括两个用于支撑的承载块,两个所述承载块相对的一侧均开设有用于限位和导向的导向槽,两个所述承载块的右端之间通过连接管设有两个用于驱动的第三气缸,前侧所述承载块的左侧设有壳体,右侧所述夹持组件与抵接组件固定,所述夹持组件的驱动端设于壳体的内部,且夹持组件和抵接组件通过滑块设于导轨上。通过抵接组件的设置,第三气缸能够通过第一l型板推动移动板在导向槽内运动,移动板带动第二l型板和弹性组件向管材运动,最终使弹性组件与管材的另一端接触,完成管材横向限位。
13.更进一步的,所述导向槽的内部设有用于连接的连接组件,所述连接组件包括用于支撑和移动的移动板,所述移动板的两端设于导向槽的内部,所述移动板的上表面右侧栓接有第一l型板,所述第一l型板与第三气缸的输出端固定,所述移动板的上表面左侧栓接有第二l型板,所述第二l型板的上端均匀开设有多个安装孔,所述安装孔的内部设有用于与管材一端接触的弹性组件。通过连接组件的设置,使第三气缸能够推动弹性组件向管材靠近。
14.更进一步的,所述弹性组件包括用于连接的圆筒,且圆筒设于安装孔的内部,所述圆筒的内部设有用于转动和移动圆杆,所述圆杆的一端内部栓接有用于限位的螺母堵头,所述圆杆的另一端设有弧型塞,所述弧型塞与第二l型板之间设有用于复位和夹紧管材的弹簧,所述弧型塞与相邻两个限位板之间的空间相对应。弧型塞与管材的另一端开口抵触时,弧型塞受到挤压并带动圆杆向右运动,同时弧型塞压缩弹簧,使得弧型塞能够对管材进行横线限位,同时在对管件翻转时,弧型塞能够带动圆杆进行转动。
15.更进一步的,左侧所述夹持组件通过滑块设于左侧导轨上,左侧夹持组件的左端设有用于翻转管材的翻转组件,所述翻转组件包括用于支撑的第三l型板,所述第三l型板的上穿设有多个呈均匀分布的转轴,所述转轴贯穿第三l型板,所述转轴的一端设有与管材内部相适配的方型块,所述转轴的另一端套设有用于传动的齿轮,多个所述齿轮的外部啮合有用于转动的链条,最外侧所述转轴上设有用于驱动转轴转动的伺服电机,所述第三l型板的一端设有用于连接的连接板,所述第三l型板的上端设有用于防护的护盖。伺服电机带动其上的转轴转动,使得转轴同时带动其上的方型块和齿轮转动,同时其上的齿轮通过链条带动其它的齿轮转动,其他齿轮带动其上的转轴转动,从而使其它的方型块能够同步转动,使管材能够同时转动。
16.更进一步的,所述壳体的底端设有用于定位的z型板,所述z型板远离壳体的一端中部均匀开设多个定位孔,且底架上开设有相适配的定位孔,所述定位孔内设有用于限位的定位销。通过导轨、z型板和定位销的设置,可以将抵接组件和加持组件进行移动同时带动z型板移动,移动至合适位置后将定位销插进定位孔内进行定位,使该设备能够适用不同长度的管材,适用性好。
17.(3)有益效果与现有技术相比,发明的有益效果在于:通过设置第一滑道、第二滑道、传动链和两个工位组件,传动链带动两个底架在第一滑道和第二滑道上反向运动,多个限位板之间能够容纳多个管材,同时第一气缸和第二气缸能够反向运动,并带动固定板和限位板对管材的两侧进行限位,使管材的轴向得到限位,同时方型块插进管材的一端,第三气缸能够通过连接组件带动弹性组件对管材的另一端进行限位,从而对管材的横向进行限位,不仅能够对管材进行批量切割,而且避免切割时由于管材弯曲造成切割不准确,提高切割效率。
18.通过伺服电机、转轴、方型块、齿轮、链条和弹性组件的配合使用,伺服电机能够带动其中一个转轴转动,在链条和齿轮相互啮合的作用下,使其它齿轮能够带动相对应的转轴同步转动,从而使方型块能够带动其上的管材同步转动,并在弹性组件的作用下,能够使管材稳固顺畅的翻转,提高切割效率。
19.通过导轨、z型板和定位销的设置,可以将抵接组件和加持组件进行移动同时带动z型板移动,移动至合适位置后将定位销插进定位孔内进行定位,使该设备能够适用不同长度的管材,适用性好。
附图说明
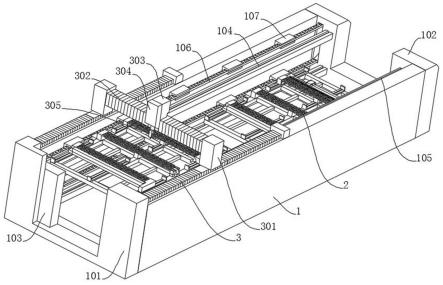
20.图1为发明的一种具体实施方式的整体结构示意图;图2为本发明的一种具体实施方的另一视角整体示意图;图3为本发明的一种具体实施方式中机体部分立体结构示意图;图4为本发明的一种具体实施方式中图3的左视剖视图;图5为本发明的一种具体实施方式中其中一个工位整体结构示意图;图6为本发明的一种具体实施方式中z型板与底架连接立体结构示意图;图7为本发明的一种具体实施方式中限位组件和抵接组件立体结构示意图;图8本发明的一种具体实施方式中图7中a处放大结构示意图;图9为本发明的一种具体实施方式中移动板、第一l型板和弹性组件剖视示意图;图10为本发明的一种具体实施方式中翻转组件立体结构示意图;图11为本发明的一种具体实施方式中图10中b处放大结构示意图;图12为本发明的一种具体实施方式支撑块剖视示意图。
21.附图中的标记为:1、机体;101、首座;102、尾座;103、传动链驱动箱;104、第一滑道;105、第二滑道;106、传动链;107、导向盒;2、工位组件;201、底架;202、导向柱;203、导轨;3、x轴驱动部件;301、支撑箱;302、y轴驱动部件;303、操控箱;304、z轴驱动部件;305、激光切割头;4、安装箱;401、第一气缸;402、第二气缸;403、支撑块;404、连接块;5、限位组件;501、固定板;502、限位板;503、滑动块;6、抵接组件;601、承载块;602、导向槽;603、连接管;
604、第三气缸;605、滑块;606、壳体;7、连接组件;701、移动板;702、第一l型板;703、第二l型板;704、安装孔;8、弹性组件;801、圆筒;802、圆杆;803、弧型塞;804、螺母堵头;805、弹簧;9、第三l型板;901、转轴;902、方型块;903、齿轮;904、链条;905、伺服电机;906、连接板;907、护盖;100、z型板;1001、定位孔;1002、定位销。
具体实施方式
22.本具体实施方式是一种双工位可批量翻转的管材激光切割设备,其结构示意图如图1-图12所示,该切割设备包括机体1、设置于机体1左端顶部用于左右移动的x轴驱动部件3、设置于x轴驱动部件3上用于支撑移动的支撑箱301、设置于支撑箱301之间用于前后移动的y轴驱动部件302、设置于y轴驱动部件302上用于操控切割的操控箱303、设置于操控箱303的左侧用于上下移动的z轴驱动部件304、设置于z轴驱动部件304的左侧用于切割的激光切割头305;机体1的左端和右端分别设有用于固定的首座101和尾座102,首座101的后端内部设有用于驱动的传动链驱动箱103,机体1的后侧内部和前侧内壁对称设有用于导向的第一滑道104和第二滑道105,第一滑道104和第二滑道105上设有两个用于批量加工的工位组件2,两个工位组件2的后端设有用于带动工位组件2往复运动的传动链106,且传动链106与传动链驱动箱103的内部传动连接,机体1的后侧内壁设有多个用于对传动链106进行导向的导向盒107,传动链106设于导向盒107的内部。
23.其中,两个工位组件2均包括用于支撑的底架201、底架201的两侧下表面均设有用于与第一滑道104和第二滑道105呈滑动连接的导向柱202,底架201的顶部对称设有三个用于导向的导轨203;底架201的顶部设有三个用于对管材进行轴向限位的夹持组件,三个夹持组件均包括用于安装伸缩气缸的安装箱4、安装箱4的两侧设有用于驱动的第一气缸401和第二气缸402、安装箱4相对的一侧设有用于滑动支撑的连接块404和三个用于夹持多个管材的限位组件5,连接块404的内部设有用于升降的伸缩气缸;三个限位组件5均包括用于导向和支撑的固定板501,固定板501的上表面设有多个用于与管材侧壁接触的限位板502,多个限位板502呈等间距分布,中间固定板501的厚度大于另外两个固定板501的厚度,三个固定板501的一端分别与第一气缸401的输出端、第二气缸402的输出端和伸缩气缸的输出端固定,三个固定板501的另一端均滑动连接在连接块404的内部,底架201的顶端中部设有用于对固定板501进行支撑导向的支撑块403,左右限位组件5的下方均设有运动导向的滑动块503,且滑动块503的顶端结构与支撑块403的顶端结构相同,滑动块503的底端设于导轨203内。
24.其中,右侧导轨203上设有用于对管材横向限位的抵接组件6,抵接组件6包括两个用于支撑的承载块601,两个承载块601相对的一侧均开设有用于限位和导向的导向槽602,两个承载块601的右端之间通过连接管603设有两个用于驱动的第三气缸604,前侧承载块601的左侧设有壳体606,右侧夹持组件与抵接组件6固定,夹持组件的驱动端设于壳体606的内部,且夹持组件和抵接组件6通过滑块605设于导轨203上;壳体606的底端设有用于定位的z型板100,z型板100远离壳体606的一端中部均匀开设多个定位孔1001,且底架201上开设有相适配的定位孔1001,定位孔1001内设有用于限位的定位销1002;导向槽602的内部设有用于连接的连接组件7,连接组件7包括用于支撑和移动的移动板701,移动板701的两端设于导向槽602的内部,移动板701的上表面右侧栓接有第一l型板702,第一l型板702与
第三气缸604的输出端固定,移动板701的上表面左侧栓接有第二l型板703,第二l型板703的上端均匀开设有多个安装孔704,安装孔704的内部设有用于与管材一端接触的弹性组件8;弹性组件8包括用于连接的圆筒801,且圆筒801设于安装孔704的内部,圆筒801的内部设有用于转动和移动圆杆802,圆杆802的一端内部栓接有用于限位的螺母堵头804,圆杆802的另一端设有弧型塞803,弧型塞803与第二l型板703之间设有用于复位和夹紧管材的弹簧805,弧型塞803与相邻两个限位板502之间的空间相对应。
25.此外,左侧夹持组件通过滑块605设于左侧导轨203上,左侧夹持组件的左端设有用于翻转管材的翻转组件,翻转组件包括用于支撑的第三l型板9,第三l型板9的上穿设有多个呈均匀分布的转轴901,转轴901贯穿第三l型板9,转轴901的一端设有与管材内部相适配的方型块902,转轴901的另一端套设有用于传动的齿轮903,多个齿轮903的外部啮合有用于转动的链条904,最外侧转轴901上设有用于驱动转轴901转动的伺服电机905,第三l型板9的一端设有用于连接的连接板906,第三l型板9的上端设有用于防护的护盖907。
26.该切割设备其工位组件2如图5所示,其调节长度后定位组件如图6所示,其抵接组件6和右侧夹紧组件连接如图7所示,其弹性组件8如图8和图9所示,其翻转组件的立体图和局部图如图10和图11所示。
27.使用本技术方案的切割设备时,将定位销1002从定位孔1001内取出,根据管材的长度推动连接管603,使连接管603带动其底端中部、两侧的承载块601和加持组件在滑块605的导向下滑动在导轨203上,当调节至合适位置后,将定位销1002插入定位孔1001内;然后将多个管材依次放入相邻限位板502之间,此时管材的两端底部与中间的固定板501的内底壁接触,且不与两侧固定板501的内底壁接触,随后将移动管材的一端使之套在方型块902的外部,完后通过外部控制器控制三个夹持组件上的第一气缸401同时向前运动,使第一气缸401带动相对应的固定板501向前运动,同时固定板501的另一端在连接块404内向前滑动,使限位板502与管材的一侧接触,随后控制三个夹持组件上的第二气缸402向后运动,使相对应的固定板501带动限位板502向后运动并与管材的另一侧接触,完成轴向定位;然后控制第三气缸604启动并通过第一l型板702推动移动板701在导向槽602内运动,移动板701带动第二l型板703和弹性组件8向管材运动,最终使弹性组件8与管材的另一端接触,同时弧型塞803与管材的另一端开口抵触时,弧型塞803受到挤压并带动圆杆802向右运动,同时弧型塞803压缩弹簧805,使得弧型塞803能够对管材进行横线限位;随后,通过外部控制器控制传动链驱动箱103驱动传动链106运动,使得传动链106带动两个底架201在第一滑道104和第二滑道105上反向运动,使装有管材的工位组件2位于激光切割头305的下方等待切割;通过设置外部控制器使激光切割头305在x轴驱动部件3、支撑箱301、y轴驱动部件302和z轴驱动部件304的带动下进行x方向、y方向和z方向运动,从而能够对管材进行精准切割;当一组工位组件2上的管材切割时,可以按上述流程将管材放置在另一组工位组件2上,等待切割;当需要对管材进行翻转时,由外部控制器控制激光切割头305复位,并控制第一气缸401和第二气缸402复位,使管材轴向失去限位,然后外部控制器控制伸缩气缸向下运动,使中间的固定板501进入支撑块403的内部,使管材处于悬空状态,此时外部控制器控制伺服电机905转动,伺服电机905带动其上的转轴901转动,使得转轴901同时带动其上的方型块902和齿轮903转动,同时其上的齿轮903通过链条904带动其它的齿轮903转动,其他齿轮
903带动其上的转轴901转动,从而使其它的方型块902能够同步转动,使管材能够同时转动,同时管材的另一端能够通过弧型塞803带动圆杆802和螺母堵头804转动,实现多个管材同步翻转。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1