一种平衡车舵把前叉焊接定位装置的制作方法
1.本发明涉及平衡车舵把前叉技术领域,尤其涉及一种平衡车舵把前叉焊接定位装置。
背景技术:
2.平衡车舵把前叉焊接是平衡车生产制造中很常见的一项环节,以往制造业中,舵把前叉焊接常通过人工实现,其自动化程度低、危险性大、劳动强度高、效率低。舵把前叉焊接自动化是舵把前叉焊接的发展趋势,而舵把前叉定位装置则是舵把前叉焊接实现自动化过程必不可少的设备。现有的舵把前叉由前叉钣金、前叉焊接套筒和前叉竖管组成,目前,前叉钣金和前叉焊接套筒焊接加工存在间隙,使得双侧轴孔位置与套筒底部端面尺寸超差,导致前叉钣金双侧轴孔同心度部达标,无法满足要求,影响生产要求。
技术实现要素:
3.本发明的目的在于:为了解决前叉钣金和前叉焊接套筒焊接加工存在间隙的问题,而提供的一种平衡车舵把前叉焊接定位装置。
4.为了实现上述目的,本发明采用了如下技术方案:一种平衡车舵把前叉焊接定位装置,其包括:机架、旋转机构和定位机构,所述旋转机构连接在所述机架的一侧,所述机架的顶部设置有转轴,所述转轴的一端转动连接在所述旋转机构上,所述转轴的另一端连接有所述定位机构,所述旋转机构带动所述转轴转动进而带动所述定位机构旋转,所述定位机构包括连接在所述转轴的支撑板,所述支撑板的一侧固定连接有定位座,所述定位座上设置有定位槽,前叉钣金放置在所述定位槽内,所述定位座的两端分别设置有压紧气缸,所述压紧气缸上连接有用于压紧所述前叉钣金的第一压板,所述定位座下方设置有托板,所述托板上设置有竖管导向套,前叉竖管安装在所述竖管导向套内,前叉焊接套筒安装在所述前叉竖管上,所述前叉焊接套筒与所述前叉钣金底部相连接。
5.作为上述技术方案的进一步描述:
6.所述托板上设置有活动柱塞,所述活动柱塞上设置有弹簧,所述弹簧的另一端与所述前叉竖管相连接。
7.作为上述技术方案的进一步描述:
8.所述旋转机构包括固定连接在所述机架上的驱动部件,所述驱动部件上方设置有线性滑轨,所述线性滑轨上滑动连接有第一连接板,所述驱动部件驱动所述第一连接板前后移动,所述第一连接板上设置有齿条,所述转轴上设置有匹配所述齿条的齿轮。
9.作为上述技术方案的进一步描述:
10.所述驱动部件的端部设置有第二连接板,所述第二连接板上开设有连接槽,所述第一连接板的端部固定连接在所述连接槽内。
11.作为上述技术方案的进一步描述:
12.所述第二连接板的一侧设置有第一缓冲器,所述第一连接板的底部设置有挡块,
所述挡块与所述第一缓冲器位于同一直线上。
13.作为上述技术方案的进一步描述:
14.所述线性滑轨上设置有两滑块,所述第一连接板通过所述滑块滑动连接在所述线性滑轨上。
15.作为上述技术方案的进一步描述:
16.所述驱动部件为气缸或电机。
17.作为上述技术方案的进一步描述:
18.所述机架上设置有两轴承支座,两所述轴承支座平行布置,所述转轴转动连接在所述轴承支座上。
19.作为上述技术方案的进一步描述:
20.所述第一压板的端部设置有第二压板,所述第二压板为l形板体,所述第二压板抵住所述前叉钣金的顶部。
21.作为上述技术方案的进一步描述:
22.所述机架上设置有第二缓冲器,所述第二缓冲器位于所述支撑板的一侧。
23.综上所述,由于采用了上述技术方案,本发明的有益效果是:
24.1、本发明中,采用两段式组装,从两端向中间组装的方式,如此可有效消除前叉钣金与焊接套筒底端面存在的间隙,使前叉中心轴孔和套筒低部尺寸满足公差要求,提高焊接质量
25.2、本发明中,装置自动夹紧式,转轴可以180度自动翻转,实现正/反两面机器人自动焊接加工,降低焊接难度,提高焊接速率。
26.3、本发明中,实现了自动化焊接,提高了焊接效率,通过设置的定位机构,提高了焊接质量。
附图说明
27.为了更清楚地说明本发明实施例的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,应当理解,以下附图仅示出了本发明的某些实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。
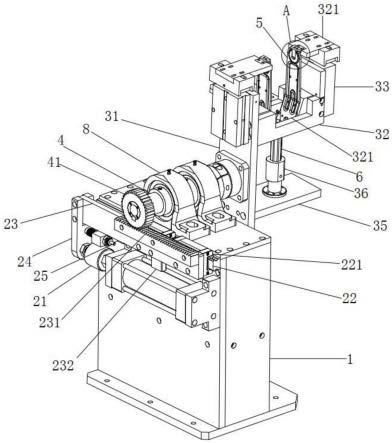
28.图1为一种平衡车舵把前叉焊接定位装置的结构示意图。
29.图2为一种平衡车舵把前叉焊接定位装置的剖视图一。
30.图3为一种平衡车舵把前叉焊接定位装置的俯视图。
31.图4为一种平衡车舵把前叉焊接定位装置的剖视图二。
32.图5为图1中a部的放大图。
33.图6为图2中b部的放大图。
34.图例说明:
35.1、机架;2、旋转机构;21、驱动部件;22、线性滑轨;221、滑块;23、第一连接板;231、齿条;232、挡块;24、第二连接板;25、第一缓冲器;3、定位机构;31、支撑板;32、定位座;321、定位槽;33、压紧气缸;34、第一压板;35、托板;351、活动柱塞;352、弹簧;36、竖管导向套;37、第二压板;4、转轴;41、齿轮;5、前叉钣金;6、前叉竖管;7、前叉焊接套筒;8、轴承支座。
具体实施方式
36.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
37.请参阅图1-6,本发明提供一种技术方案:一种平衡车舵把前叉焊接定位装置,包括:机架1、旋转机构2和定位机构3,所述旋转机构2连接在所述机架1的一侧,所述机架1的顶部设置有转轴4,所述转轴4的一端转动连接在所述旋转机构2上,所述转轴4的另一端连接有所述定位机构3,所述旋转机构2带动所述转轴4转动进而带动所述定位机构3旋转,所述定位机构3包括连接在所述转轴4的支撑板31,所述支撑板31的一侧固定连接有定位座32,所述定位座32上设置有定位槽321,前叉钣金5放置在所述定位槽321内,所述定位座32的两端分别设置有压紧气缸33,所述压紧气缸33上连接有用于压紧所述前叉钣金5的第一压板34,所述定位座32下方设置有托板35,所述托板35上设置有竖管导向套36,前叉竖管6安装在所述竖管导向套36内,前叉焊接套筒7安装在所述前叉竖管6上,所述前叉焊接套筒7与所述前叉钣金5底部相连接。
38.所述托板35上设置有活动柱塞351,所述活动柱塞351上设置有弹簧352,所述弹簧352的另一端与所述前叉竖管6相连接。可以便于取出前叉竖管6,同时起到缓冲的作用,防止前叉竖管6压坏。
39.所述旋转机构2包括固定连接在所述机架1上的驱动部件21,所述驱动部件21上方设置有线性滑轨22,所述线性滑轨22上滑动连接有第一连接板23,所述驱动部件21驱动所述第一连接板23前后移动,所述第一连接板23上设置有齿条231,所述转轴4上设置有匹配所述齿条231的齿轮41。
40.所述驱动部件21的端部设置有第二连接板24,所述第二连接板24上开设有连接槽,所述第一连接板23的端部固定连接在所述连接槽内。
41.所述第二连接板24的一侧设置有第一缓冲器25,所述第一连接板23的底部设置有挡块232,所述挡块232与所述第一缓冲器25位于同一直线上。
42.所述线性滑轨22上设置有两滑块221,所述第一连接板23通过所述滑块221滑动连接在所述线性滑轨22上。
43.所述驱动部件21为气缸。驱动部件还可以电机。
44.所述机架1上设置有两轴承支座8,两所述轴承支座8平行布置,所述转轴4转动连接在所述轴承支座8上。可以提高转轴4运动的稳定性,防止定位部件在转动时震动,从而可以提高焊接的稳定性,进而提高焊接质量。
45.所述第一压板34的端部设置有第二压板37,所述第二压板37为l形板体,所述第二压板37抵住所述前叉钣金5的顶部。
46.所述机架1上设置有第二缓冲器(未示出),所述第二缓冲器位于所述支撑板31的一侧。可以限制支撑板31转动的角度,同时可以防止支撑板31碰伤,从而可以起到保护焊接产品的目的。
47.工作原理,首先将前叉竖管6置入竖管导向套36内,前叉竖管6底端与活动柱塞351接触,活动柱塞351前端的法兰套压缩弹簧352,再将前叉焊接套筒7与前叉竖管6同轴组装,
最后把前叉钣金5置入定位槽321中,启动压紧气缸33的手动阀使第一压板34带动第二压板37向下移动,将前叉钣金5压入定位槽321中,前叉钣金5向下方压紧并带动前叉竖管6和前叉焊接套筒7下压,使弹簧352二次压缩,完成前叉钣金5、前叉竖管6和前叉焊接套筒7的固定,按下平台启动按钮,到达机器人焊接预定区域,警示后机器人焊枪正面焊接前叉钣金5和前叉竖管孔径一周区域,程序完成正面焊接;焊接程序给出握手信号,传递给驱动部件21置位,拉动固定在线性滑轨上的第一连接板23,齿条的直线运动啮合齿轮转动,进而带动转轴4转动,实现将定位部件整体转动180度,挡块232到达第一缓冲器25位置,使前叉焊接套筒7和前叉钣金5背面置于其上,警示信号发出,机器人开始沿焊接竖管和前叉钣金中心孔周边指定位置焊接一圈直至完成动作。
48.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1