驱动钻的制作方法
1.本说明书所公开的技术涉及一种驱动钻(driver drill)。
背景技术:
2.在驱动钻所涉及的技术领域中,已知有:如专利文献1所公开那样的驱动钻。
3.现有技术文献
4.专利文献
5.专利文献1:日本特开2021-045844号公报
技术实现要素:
6.在驱动钻中对马达的驱动条件进行变更的情况下,作业者期望如下所述:想要保持使用驱动钻的作业姿势不变地,能够顺畅地对马达的驱动条件进行变更。
7.本说明书所公开的技术的目的在于:在驱动钻中,能够顺畅地对马达的驱动条件进行变更。
8.本说明书公开了一种驱动钻。驱动钻可以具备:马达;输出部,该输出部配置于比马达更靠前方的位置,并且通过马达的旋转力而进行旋转;触发器杆,对该触发器杆进行操作,以便使马达进行启动;正反转切换杆,对该正反转切换杆进行操作,以便对马达的旋转方向进行切换;第1操作部件,对该第1操作部件进行操作,以便对马达的驱动条件进行变更;第2操作部件,该第2操作部件配置于比第1操作部件更靠上方的位置,并且对第2操作部件进行操作,以便对马达的驱动条件进行变更;以及控制器,该控制器基于第1操作部件以及第2操作部件的至少一方的操作,而对马达的驱动条件进行设定。
9.另外,驱动钻可以具备:马达;输出部,该输出部配置于比马达更靠前方的位置,并且通过马达的旋转力而进行旋转;振动部,该振动部配置于马达与输出部之间的位置,能够对使输出部在前后方向上进行振动的情况、与使输出部不在前后方向上进行振动的情况进行切换;触发器杆,对该触发器杆进行操作,以便使马达进行启动;正反转切换杆,对该正反转切换杆进行操作,以便对马达的旋转方向进行切换;马达外壳,该马达外壳用于对马达进行收容;把持外壳,该把持外壳从马达外壳朝向下方延伸;操作按钮,该操作按钮配置于马达外壳,并且对该操作按钮进行操作,以便对马达的驱动条件进行变更;以及控制器,该控制器基于操作按钮的操作,而对马达的驱动条件进行设定。
10.发明效果
11.根据本说明书所公开的技术,在驱动钻中,能够顺畅地对马达的驱动条件进行变更。
附图说明
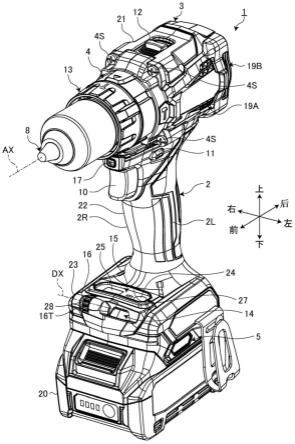
12.图1是表示从前方观察实施方式所涉及的驱动钻的立体图。
13.图2是表示从后方观察实施方式所涉及的驱动钻的立体图。
14.图3是表示实施方式所涉及的驱动钻的侧视图。
15.图4是表示实施方式所涉及的驱动钻的截面图。
16.图5是表示实施方式所涉及的驱动钻的一部分的截面图。
17.图6是表示从前方观察实施方式所涉及的拨盘的图。
18.图7是表示实施方式所涉及的拨盘以及照明单元的截面图。
19.图8是表示实施方式所涉及的驱动钻的框图。
20.图9是表示实施方式所涉及的驱动钻的使用例的图。
21.图10是表示从后方观察变形例所涉及的驱动钻的立体图。
22.图11是用于对变形例所涉及的马达的驱动条件进行说明的图。
23.附图标记说明
[0024]1…
驱动钻;1b
…
驱动钻;2
…
外壳;2l
…
左外壳;2r
…
右外壳;2s
…
螺丝;3
…
后罩;3s
…
螺丝;4
…
外罩;4a
…
第1外罩;4b
…
第2外罩;4c
…
托架板;4d
…
挡板;4e
…
螺丝;4s
…
螺丝;5
…
蓄电池装配部;6
…
马达;7
…
动力传递机构;8
…
输出部;9
…
风扇;10
…
触发器杆;11
…
正反转切换杆;12
…
速度切换杆;13
…
模式切换环;14
…
照明单元;15
…
界面面板;16
…
拨盘(第1操作部件);16a
…
凸轮突起;16b
…
突起部;16c
…
凸部;16l
…
凹部;16r
…
凹部;16t
…
凸部;17
…
手动开关(第2操作部件);17b
…
手动开关;18
…
控制器;19a
…
进气口;19b
…
排气口;20
…
蓄电池组;21
…
马达收容部;22
…
把持部;23
…
蓄电池保持部;24
…
操作装置;25
…
显示装置;26
…
控制器壳体;27
…
面板开口;28
…
拨盘开口;30
…
减速机构;31
…
第1行星齿轮机构;31c
…
第1齿轮架;31p
…
行星齿轮;31r
…
内齿轮;31s
…
小齿轮;32
…
第2行星齿轮机构;32c
…
第2齿轮架;32p
…
行星齿轮;32r
…
内齿轮;32s
…
太阳齿轮;33
…
第3行星齿轮机构;33c
…
第3齿轮架;33p
…
行星齿轮;33r
…
内齿轮;33s
…
太阳齿轮;34
…
速度切换环;34m
…
永磁体;34t
…
凸部;35
…
结合环;36
…
螺旋弹簧;40
…
振动机构;41
…
第1凸轮;42
…
第2凸轮;43
…
振动切换环;43s
…
对置部;43t
…
突起部;44
…
止动环;45
…
支承环;46
…
钢珠;47
…
垫圈;48
…
凸轮环;49
…
模式检测用环;49m
…
永磁体;51
…
触发信号生成电路;52
…
正反转操作传感器;53
…
速度操作传感器;54
…
模式操作传感器;55
…
拨盘操作传感器;56
…
加速度传感器;61
…
定子;61a
…
定子铁心;61b
…
前绝缘子;61c
…
后绝缘子;61d
…
线圈;61e
…
传感器电路基板;61f
…
熔断端子;61g
…
短路部件;62
…
转子;62a
…
转子铁心;62b
…
永磁体;63
…
转子轴;64
…
轴承;65
…
轴承;70
…
前端工具;81
…
主轴;81f
…
凸缘部;82
…
卡盘;83
…
轴承;84
…
轴承;85
…
锁定凸轮;86
…
锁定环;87
…
螺旋弹簧;161
…
杆;162
…
永磁体;163
…
凸轮;163a
…
凸轮突起;163t
…
凸部;164
…
螺旋弹簧;165
…
中央凹部;166
…
左凹部;167
…
右凹部;168
…
沟;169
…
罩部;ax
…
旋转轴;dx
…
拨盘轴。
具体实施方式
[0025]
在1个或者1个以上的实施方式中,驱动钻可以具备:马达;输出部,该输出部配置于比马达更靠前方的位置,并且通过马达的旋转力而进行旋转;触发器杆,对该触发器杆进行操作,以便使马达进行启动;正反转切换杆,对该正反转切换杆进行操作,以便对马达的旋转方向进行切换;第1操作部件,对该第1操作部件进行操作,以便对马达的驱动条件进行变更;第2操作部件,该第2操作部件配置于比第1操作部件更靠上方的位置,并且对第2操作部件进行操作,以便对马达的驱动条件进行变更;以及控制器,该控制器基于第1操作部件
以及第2操作部件的至少一方的操作,而对马达的驱动条件进行设定。
[0026]
在上述构成中,除了第1操作部件之外,还设置有第2操作部件。第2操作部件配置于:比第1操作部件更靠上方的位置。在对马达的驱动条件进行变更的情况下,作业者能够保持使用驱动钻的作业姿势不变地,对第2操作部件进行操作,来顺畅地对马达的驱动条件进行变更。
[0027]
在1个或者1个以上的实施方式中,驱动钻可以具备外壳,该外壳具有:用于对马达进行收容的马达收容部、从马达收容部朝向下方延伸的把持部、以及配置于把持部的下部位置的蓄电池保持部。第1操作部件可以配置于:蓄电池保持部。第2操作部件可以配置于:把持部或者马达收容部。
[0028]
在上述构成中,在对马达的驱动条件进行变更的情况下,作业者能够保持在用手握持着把持部的状态下使用驱动钻的作业姿势不变地,对第2操作部件进行操作,来顺畅地对马达的驱动条件进行变更。
[0029]
在1个或者1个以上的实施方式中,触发器杆可以配置于:把持部的前部。第2操作部件可以配置于:触发器杆的上方位置。
[0030]
在上述构成中,在对马达的驱动条件进行变更的情况下,作业者能够在例如用右手握持着把持部的状态下保持使用驱动钻的作业姿势不变地,使用右手的食指等,来对第2操作部件进行操作。亦即,作业者能够保持使用驱动钻的作业姿势不变地,用一只手来对马达的驱动条件进行变更。
[0031]
在1个或者1个以上的实施方式中,可以构成为:当在马达的驱动中作用于马达的扭矩超过扭矩阈值时,控制器使马达停止。驱动条件可以包括扭矩阈值。
[0032]
在上述构成中,在驱动钻被设定为离合器模式的状态下,通过对第2操作部件进行操作,来变更扭矩阈值。
[0033]
在1个或者1个以上的实施方式中,驱动条件可以包括:从扭矩超过扭矩阈值起至马达停止为止的马达的动作或者时间。
[0034]
在上述构成中,作业者能够对第2操作部件进行操作,而根据例如作业者的喜好来调整马达的驱动条件。
[0035]
在1个或者1个以上的实施方式中,第2操作部件可以包括推压式开关。可以构成为:通过对推压式开关进行1次推压操作,使扭矩阈值以规定量进行变更。
[0036]
在上述构成中,作业者能够通过对作为推压式开关的第2操作部件进行推压操作,使扭矩阈值以规定量进行变更。
[0037]
在1个或者1个以上的实施方式中,可以构成为:通过在正反转切换杆处于第1操作状态时对推压式开关进行推压操作,扭矩阈值上升,通过在正反转切换杆处于第2操作状态时对推压式开关进行推压操作,扭矩阈值下降。
[0038]
在上述构成中,能够通过将正反转切换杆的操作状态与推压式开关的操作状态组合起来,使得扭矩阈值上升或下降。
[0039]
在1个或者1个以上的实施方式中,正反转切换杆与推压式开关的至少一部分可以配置在:相同高度。
[0040]
在上述构成中,作业者能够例如用一只手来对正反转切换杆与作为推压式开关的第2操作部件进行操作。
[0041]
在1个或者1个以上的实施方式中,第1操作部件的操作方向、与所述第2操作部件的操作方向可以是不同的。
[0042]
在上述构成中,作业者能够根据作业状况而对第1操作部件以及第2操作部件中的容易操作那一方的操作部件进行操作,来对马达的驱动条件进行操作。作业者在处于例如难以操作第1操作部件的作业状况的情况下,能够使用第2操作部件来变更扭矩阈值。作业者在处于例如难以操作第2操作部件的作业状况的情况下,能够使用第1操作部件来变更扭矩阈值。
[0043]
在1个或者1个以上的实施方式中,第1操作部件可以包括:能够旋转360[
°
]以上的拨盘。
[0044]
在上述构成中,作业者通过使拨盘进行旋转,能够操作性良好地对马达的详细的驱动条件进行变更。另外,拨盘能够旋转360[
°
]以上,所以,作业者能够操作性良好地对马达的驱动条件进行变更。
[0045]
在1个或者1个以上的实施方式中,驱动钻1可以具备显示装置。控制器可以使马达的驱动条件显示于显示装置。
[0046]
在上述构成中,作业者能够通过观察显示装置来识别马达的驱动条件。
[0047]
在1个或者1个以上的实施方式中,驱动条件可以包括:从对触发器杆进行操作之后至马达的转速达到规定值为止的马达的动作或者时间。
[0048]
在上述构成中,作业者能够对第2操作部件进行操作,而根据例如作业者的喜好来调整马达的驱动条件。
[0049]
在1个或者1个以上的实施方式中,驱动钻可以具备加速度传感器。可以构成为:当加速度传感器的检测值超过加速度阈值时,控制器使马达停止。驱动条件可以包括加速度阈值。
[0050]
在上述构成中,在例如使用驱动钻的作业中,当过度的反作用力作用于驱动钻从而导致驱动钻克服作业者的力而较大地活动的情况下,马达就会停止。作业者能够对第2操作部件进行操作,而根据例如作业状况来调整加速度阈值。
[0051]
在1个或者1个以上的实施方式中,驱动钻可以具备:马达;输出部,该输出部配置于比马达更靠前方的位置,并且通过马达的旋转力而进行旋转;振动部,该振动部配置于马达与输出部之间的位置,能够对使输出部在前后方向上进行振动的情况、与使输出部不在前后方向上进行振动的情况进行切换;触发器杆,对该触发器杆进行操作,以便使马达进行启动;正反转切换杆,对该正反转切换杆进行操作,以便对马达的旋转方向进行切换;马达外壳,该马达外壳用于对马达进行收容;把持外壳,该把持外壳从马达外壳朝向下方延伸;操作按钮,该操作按钮配置于马达外壳,并且对该操作按钮进行操作,以便对马达的驱动条件进行变更;以及控制器,该控制器基于操作按钮的操作,而对马达的驱动条件进行设定。
[0052]
在上述构成中,在马达外壳配置有操作按钮。在对马达的驱动条件进行变更的情况下,作业者能够保持使用驱动钻的作业姿势不变地,对操作按钮进行操作,来顺畅地对马达的驱动条件进行变更。
[0053]
以下,参照附图,对本发明所涉及的实施方式进行说明,但是,本本发明不限定于此。以下说明的实施方式的构成要素能够适当地组合。另外,有时也不使用一部分的构成要素。
[0054]
在实施方式中,使用左、右、前、后、上、以及下这样的用语,来说明各部分的位置关系。这些用语表示:以驱动钻的中心为基准的相对位置或者方向。
[0055]
驱动钻具有马达。在实施方式中,将与马达的旋转轴ax相平行的方向适当地称为:轴向,将环绕旋转轴ax的周围的方向适当地称为:周向或者旋转方向,将旋转轴ax的放射方向适当地称为:径向。
[0056]
在实施方式中,旋转轴ax沿着前后方向延伸。轴向与前后方向相一致。轴向一侧是前方,轴向另一侧是后方。另外,关于径向,将相距旋转轴ax较近的位置或者接近旋转轴ax的方向适当地称为:径向内侧,将相距旋转轴ax较远的位置或者远离旋转轴ax的方向适当地称为:径向外侧。
[0057]
[驱动钻的概要]
[0058]
图1是表示从前方观察实施方式所涉及的驱动钻1的立体图。图2是表示从后方观察实施方式所涉及的驱动钻1的立体图。图3是表示实施方式所涉及的驱动钻1的侧视图。图4是表示实施方式所涉及的驱动钻1的截面图。在实施方式中,驱动钻1是振动驱动钻。
[0059]
如图1、图2、图3、以及图4所示,驱动钻1具备:外壳2、后罩3、外罩4、蓄电池装配部5、马达6、动力传递机构7、输出部8、风扇9、触发器杆10、正反转切换杆11、速度切换杆12、模式切换环13、照明单元14、界面面板15、拨盘16、手动开关17、以及控制器18。
[0060]
外壳2由合成树脂制成。在实施方式中,外壳2由尼龙制成。外壳2包括:左外壳2l、以及右外壳2r。左外壳2l与右外壳2r通过螺丝2s而被固定。通过将左外壳2l与右外壳2r进行固定,来形成外壳2。
[0061]
外壳2具有:马达收容部21、把持部22、以及蓄电池保持部23。
[0062]
马达收容部21用于对马达6进行收容。马达收容部21呈筒状。
[0063]
把持部22供作业者握持。把持部22配置于:马达收容部21的下方位置。把持部22从马达收容部21朝向下方延伸。触发器杆10配置于:把持部22的前部。
[0064]
蓄电池保持部23用于对控制器18进行收容。蓄电池保持部23配置于:把持部22的下部。蓄电池保持部23连接于把持部22的下端部。在前后方向以及左右方向的各个方向上,蓄电池保持部23的外形尺寸都大于把持部22的外形尺寸。
[0065]
后罩3由合成树脂制成。后罩3配置于:马达收容部21的后方位置。后罩3用于对风扇9进行收容。后罩3配置为:对马达收容部21的后部的开口进行覆盖。后罩3通过螺丝3s而被固定于马达收容部21。
[0066]
马达收容部21具有:进气口19a。后罩3具有:排气口19b。外壳2的外部空间的空气经由进气口19a而流入到外壳2的内部空间。外壳2的内部空间的空气经由排气口19b而流出到外壳2的外部空间。
[0067]
外罩4用于对动力传递机构7进行收容。外罩4包括:第1外罩4a、以及第2外罩4b。第2外罩4b配置于:第1外罩4a的前方位置。模式切换环13配置于:第2外罩4b的前方位置。第1外罩4a由合成树脂制成。第2外罩4b由金属制成。在实施方式中,第2外罩4b由铝制成。外罩4配置于:马达收容部21的前方位置。第1外罩4a以及第2外罩4b分别呈筒状。
[0068]
第1外罩4a被固定于:第2外罩4b的后端部。第1外罩4a的后端部的开口由托架板4c覆盖。第2外罩4b的前端部的开口由挡板4d覆盖。挡板4d通过螺丝4e而被固定于第2外罩4b的前端部。
[0069]
外罩4配置为:对马达收容部21的前部的开口进行覆盖。第1外罩4a配置于:马达收容部21的内侧位置。第2外罩4b通过螺丝4s而被固定于马达收容部21。
[0070]
蓄电池装配部5形成于:蓄电池保持部23的下部。蓄电池装配部5连接于蓄电池组20。蓄电池组20被装配于蓄电池装配部5。蓄电池组20能够拆装于蓄电池装配部5。蓄电池组20包括二次电池。在实施方式中,蓄电池组20包括:充电式的锂离子电池。蓄电池组20通过被装配于蓄电池装配部5,能够向驱动钻1供电。马达6基于从蓄电池组20被供给来的电力而进行驱动。界面面板15以及控制器18基于从蓄电池组20被供给来的电力而进行工作。
[0071]
马达6是驱动钻1的动力源。马达6是:内转子型的无刷马达。马达6被收容于马达收容部21。马达6具有:筒状的定子61、以及配置于定子61的内侧位置的转子62。转子62包括:沿着轴向延伸的转子轴63。
[0072]
动力传递机构7配置于:马达6的前方位置。动力传递机构7被收容于外罩4。动力传递机构7将转子轴63与输出部8连结起来。动力传递机构7将马达6所产生的动力传递于输出部8。动力传递机构7具有多个齿轮。
[0073]
动力传递机构7具有:减速机构30、以及振动机构40。
[0074]
减速机构30使转子轴63的旋转减速,而使输出部8以比转子轴63还要低的旋转速度进行旋转。在实施方式中,减速机构30具有:第1行星齿轮机构31、第2行星齿轮机构32、以及第3行星齿轮机构33。第2行星齿轮机构32配置于:第1行星齿轮机构31的前方位置。第3行星齿轮机构33配置于:第2行星齿轮机构32的前方位置。
[0075]
振动机构40使输出部8在轴向上进行振动。振动机构40具有:第1凸轮41、第2凸轮42、以及振动切换环43。
[0076]
输出部8配置于:比马达6更靠前方的位置。输出部8通过马达6的旋转力而进行旋转。输出部8基于经由动力传递机构7而从马达6被传递来的旋转力,在安装有前端工具的状态下进行旋转。输出部8包括:基于从马达6被传递来的旋转力而以旋转轴ax为中心进行旋转主轴81、以及供前端工具安装的卡盘82。
[0077]
风扇9配置于:马达6的后方位置。风扇9生成:用于使马达6进行冷却的气流。风扇9被固定于:转子62的至少一部分。风扇9被固定于:转子轴63的后部。风扇9通过转子轴63的旋转而进行旋转。通过转子轴63进行旋转,风扇9与转子轴63一起进行旋转。通过风扇9进行旋转,外壳2的外部空间的空气经由吸气口19a而流入到外壳2的内部空间。流入到外壳2的内部空间的空气通过在外壳2的内部空间进行流通,而对马达6进行冷却。在外壳2的内部空间进行流通的空气经由排气口19b而流出到外壳2的外部空间。
[0078]
触发器杆10是为了启动马达6而被操作的。触发器杆10设置于:把持部22的上部。触发器杆10的前端部从把持部22的前部朝向前方突出出来。触发器杆10能够沿着前后方向进行移动。触发器杆10由作业者进行操作。通过以朝向后方进行移动的方式操作触发器杆10,使得马达6启动。通过解除触发器杆10的操作,使得马达6停止。
[0079]
正反转切换杆11是为了切换马达6的旋转方向而被操作的。正反转切换杆11设置于:把持部22的上部。正反转切换杆11的左端部从把持部22的左部朝向左方突出出来。正反转切换杆11的右端部从把持部22的右部朝向右方突出出来。正反转切换杆11能够在左右方向上进行移动。正反转切换杆11由作业者进行操作。通过以朝向左方进行移动的方式操作正反转切换杆11,使得马达6沿着正转方向进行旋转。通过以朝向右方进行移动的方式操作
正反转切换杆11,使得马达6沿着反转方向进行旋转。通过对马达6的旋转方向进行切换,对主轴81的旋转方向进行切换。
[0080]
速度切换杆12是为了变更减速机构30的速度模式而被操作的。速度切换杆12设置于:马达收容部21的上部。速度切换杆12能够沿着前后方向进行移动。速度切换杆12由作业者进行操作。减速机构30的速度模式包括:低速模式与高速模式。低速模式是指:使输出部8以低速度进行旋转的速度模式。高速模式是指:使输出部8以高速度进行旋转的速度模式。通过以朝向前方进行移动的方式操作速度切换杆12,减速机构30的速度模式被设定为低速模式。通过以朝向后方进行移动的方式操作速度切换杆12,减速机构30的速度模式被设定为高速模式。
[0081]
模式切换环13是为了变更振动机构40的作业模式而被操作的。模式切换环13配置于:外罩4的前方位置。模式切换环13能够进行旋转。模式切换环13由作业者进行操作。振动机构40的作业模式包括:振动模式与非振动模式。振动模式是指:使输出部8在轴向上进行振动的作业模式。非振动模式是指:使输出部8不在轴向上进行振动的作业模式。通过以被配置于旋转方向的振动模式位置的方式操作模式切换环13,振动机构40的作业模式被设定为振动模式。通过以被配置于旋转方向的非振动模式位置的方式操作模式切换环13,振动机构40的作业模式被设定为非振动模式。
[0082]
照明单元14射出:对驱动钻1的前方进行照明的照明光。照明单元14例如包括发光二极管(led:light emitting diode)。照明单元14设置于:蓄电池保持部23的前部的左部。
[0083]
界面面板15设置于蓄电池保持部23。界面面板15包括:操作装置24、以及显示装置25。界面面板15呈板状。操作装置24包括操作按钮。作为显示装置25而举例示出:包括多个分段发光器的分段显示器、液晶显示器那样的平板显示器、以及配置有多个发光二极管的指示灯型显示器。
[0084]
在蓄电池保持部23形成有面板开口27。面板开口27在比把持部22更靠前方的位置,被形成于:蓄电池保持部23的上表面。界面面板15的至少一部分配置于面板开口27。
[0085]
操作装置24是为了变更马达6的驱动模式而被操作的。操作装置24由作业者进行操作。马达6的驱动模式包括:钻孔模式以及离合器模式。钻孔模式是指:在马达6的驱动中无论作用于马达6的扭矩如何都使马达6进行驱动的驱动模式。离合器模式是指:当在马达6的驱动中作用于马达6的扭矩超过扭矩阈值时使马达6停止的驱动模式。
[0086]
拨盘16是:为了变更马达6的驱动条件而被操作的第1操作部件。拨盘16配置于:蓄电池保持部23的前部的右部。拨盘16能够以拨盘轴dx为中心而进行旋转。拨盘轴dx在左右方向上延伸。拨盘16能够旋转360[
°
]以上。拨盘16由作业者进行操作。马达6的驱动条件包括扭矩阈值。拨盘16是为了在由操作装置24设定的离合器模式中变更扭矩阈值而被操作的。
[0087]
在蓄电池保持部23形成有拨盘开口28。拨盘开口28形成于:蓄电池保持部23的前部的右部。拨盘16的至少一部分配置于拨盘开口28。
[0088]
手动开关17是:为了变更马达6的驱动条件而被操作的第2操作部件。手动开关17配置于:比拨盘16更靠上方的位置。手动开关17配置于:把持部22或者马达收容部21。在实施方式中,手动开关17在把持部22的前部,被配置于:触发器杆10的上方且模式切换环13的下方位置。正反转切换杆11与手动开关17的至少一部分配置在:相同高度。手动开关17的前
端部从把持部22的前部朝向前方突出出来。手动开关17能够沿着前后方向进行移动。手动开关17由作业者进行操作。手动开关17是推压式开关。通过以朝向后方被按压的方式操作手动开关17,来变更马达6的驱动条件。如上述那样,马达6的驱动条件包括扭矩阈值。在离合器模式下,通过对手动开关17进行1次推压操作,使扭矩阈值以规定量进行变更。
[0089]
控制器18包括计算机系统。控制器18输出:用于对马达6进行控制的控制指令。控制器18的至少一部分被收容于:控制器壳体26。控制器18在被保持于控制器壳体26的状态下,被收容于蓄电池保持部23。控制器18包括:安装有多个电子元器件的电路基板。作为安装于电路基板的电子元器件而举例示出:cpu(central processing unit)那样的处理器、rom(read only memory)或者储存器那样的非易失性存储器、ram(random access memory)那样的易失性存储器、晶体管、电容器、以及电阻器。
[0090]
控制器18基于拨盘16以及手动开关17的至少一方的操作,而设定马达6的驱动条件。如上述那样,马达6的驱动条件包括扭矩阈值。在离合器模式下,控制器18基于拨盘16以及手动开关17的至少一方的操作,而设定扭矩阈值。
[0091]
另外,在离合器模式下,当在马达6的驱动中作用于马达6的扭矩超过所设定的扭矩阈值时,控制器18使马达6停止。
[0092]
另外,控制器18使所设定的马达6的驱动条件显示于显示装置25。控制器18使所设定的扭矩阈值显示于显示装置25。
[0093]
[马达以及动力传递机构]
[0094]
图5是表示实施方式所涉及的驱动钻1的一部分的截面图。如图5所示,马达6具有:筒状的定子61、以及配置于定子61的内侧位置的转子62。转子62包括:沿着轴向延伸的转子轴63。
[0095]
定子61具有:包括被层叠起来的多个钢板的定子铁心61a、配置于定子铁心61a的前部的前绝缘子61b、配置于定子铁心61a的后部的后绝缘子61c、借助前绝缘子61b以及后绝缘子61c而被卷绕于定子铁心61a的多个线圈61d、被安装于前绝缘子61b的传感器电路基板61e、连接于线圈61d的熔断端子61f、以及被支承于前绝缘子61b的短路部件61g。传感器电路基板61e具有:用于对转子62的旋转进行检测的多个旋转检测元件。短路部件61g借助熔断端子61f而将多个线圈61d连接起来。短路部件61g借助引线而连接于控制器18。
[0096]
转子62以旋转轴ax为中心而进行旋转。转子62具有:转子轴63、配置于转子轴63的周围位置的转子铁心62a、以及被保持于转子铁心62a的多个永磁体62b。转子铁心62a呈圆筒状。转子铁心62a包括:被层叠起来的多个钢板。转子铁心62a具有沿着轴向延伸的贯通孔。贯通孔在周向上形成有多个。永磁体62b分别配置于:转子铁心62a的多个贯通孔。
[0097]
传感器电路基板61e的旋转检测元件通过对永磁体62b的磁场进行检测,来对转子62的旋转进行检测。控制器18基于旋转检测元件的检测数据,而向线圈61d供给驱动电流。
[0098]
转子轴63以旋转轴ax为中心而进行旋转。转子轴63的旋转轴ax与输出部8的旋转轴相一致。转子轴63的前部以能够旋转的方式支承于轴承64。转子轴63的后部以能够旋转的方式支承于轴承65。轴承64被保持于:在定子61的前方位置配置的托架板4c。轴承65被保持于后罩3。转子轴63的前端部配置于:比轴承64更靠前方的位置。转子轴63的前端部配置于:外罩4的内部空间。
[0099]
在转子轴63的前端部设置有小齿轮31s。转子轴63借助小齿轮31s而连结于减速机
构30的第1行星齿轮机构31。
[0100]
第1行星齿轮机构31具有:配置于小齿轮31s的周围位置的多个行星齿轮31p、用于对多个行星齿轮31p进行支承的第1齿轮架31c、以及配置于多个行星齿轮31p的周围位置的内齿轮31r。在第1齿轮架31c的外周部设置有齿轮。
[0101]
第2行星齿轮机构32具有:太阳齿轮32s、配置于太阳齿轮32s的周围位置的多个行星齿轮32p、用于对多个行星齿轮32p进行支承的第2齿轮架32c、以及配置于多个行星齿轮32p的周围位置的内齿轮32r。太阳齿轮32s配置于:第1齿轮架31c的前方位置。太阳齿轮32s的直径小于第1齿轮架31c的直径。第1齿轮架31c与太阳齿轮32s呈一体。第1齿轮架31c与太阳齿轮32s一起进行旋转。
[0102]
第3行星齿轮机构33具有:太阳齿轮33s、配置于太阳齿轮33s的周围位置的多个行星齿轮33p、用于对多个行星齿轮33p进行支承的第3齿轮架33c、以及配置于多个行星齿轮33p的周围位置的内齿轮33r。太阳齿轮33s配置于:第2齿轮架32c的前方位置。
[0103]
另外,减速机构30具有:连结于速度切换杆12的速度切换环34、以及配置于速度切换环34的前方位置的结合环35。结合环35被固定于:第1外罩4a的内表面。在结合环35的内周部设置有齿轮。速度切换环34具有:朝向上方突出出来的凸部34t。在凸部34t的前方位置以及后方位置分别设置有螺旋弹簧36。速度切换环34借助螺旋弹簧36而连结于速度切换杆12。
[0104]
速度切换环34对低速模式与高速模式进行切换。速度切换环34连结于内齿轮32r。速度切换杆12借助速度切换环34而连结于内齿轮32r。速度切换杆12、速度切换环34以内齿轮32r能够一体地进行移动。通过由作业者对速度切换杆12进行操作,速度切换环34在第1外罩4a的内侧沿着前后方向进行移动。速度切换环34通过在内齿轮32r与行星齿轮32p相啮合的状态下,在低速模式位置、与比低速模式位置更靠后方位置的高速模式位置之间沿着前后方向进行移动,而对低速模式与高速模式进行切换。通过对速度切换杆12进行操作,而对低速模式与高速模式进行切换。
[0105]
内齿轮32r在配置于低速模式位置的状态下,与结合环35相接触。通过内齿轮32r与结合环35相接触,限制内齿轮32r的旋转。内齿轮32r在配置于高速模式位置的状态下,从结合环35分离开。通过内齿轮32r从结合环35分离开,允许内齿轮32r的旋转。
[0106]
另外,内齿轮32r在配置于低速模式位置的状态下,与行星齿轮32p相啮合。内齿轮32r在配置于高速模式位置的状态下,与行星齿轮32p以及第1齿轮架31c这双方相啮合。
[0107]
在内齿轮32r配置于低速模式位置的状态下,当通过马达6的驱动而使得转子轴63进行旋转时,小齿轮31s就会旋转,由此行星齿轮31p在小齿轮31s的周围进行公转。通过行星齿轮31p的公转,第1齿轮架31c以及太阳齿轮32s以比转子轴63的旋转速度还要低的旋转速度而进行旋转。当太阳齿轮32s进行旋转时,行星齿轮32p就会在太阳齿轮32s的周围进行公转。通过行星齿轮32p的公转,第2齿轮架32c以及太阳齿轮33s以比第1齿轮架31c的旋转速度还要低的旋转速度而进行旋转。这样,在内齿轮32r配置于低速模式位置的状态下,当马达6进行驱动时,第1行星齿轮机构31的减速功能以及第2行星齿轮机构32的减速功能这双方得以发挥,由此第2齿轮架32c以及太阳齿轮33s以低速模式进行旋转。
[0108]
在内齿轮32r配置于高速模式位置的状态下,当通过马达6的驱动而使得转子轴63进行旋转时,小齿轮31s就会旋转,由此行星齿轮31p在小齿轮31s的周围进行公转。通过行
星齿轮31p的公转,第1齿轮架31c以及太阳齿轮32s就会以比转子轴63的旋转速度还要低的旋转速度而进行旋转。在内齿轮32r配置于高速模式位置的状态下,内齿轮32r与行星齿轮32p以及第1齿轮架31c这双方相啮合,所以,内齿轮32r与第1齿轮架31c一起进行旋转。通过内齿轮32r的旋转,行星齿轮32p以与内齿轮32r的旋转速度相同的公转速度而进行公转。通过行星齿轮32p的公转,第2齿轮架32c以及太阳齿轮33s以与第1齿轮架31c的旋转速度相同的旋转速度而进行旋转。这样,在内齿轮32r配置于高速模式位置的状态下,当马达6进行驱动时,第1行星齿轮机构31的减速功能得以发挥,但是,第2行星齿轮机构32的减速功能不会发挥,由此第2齿轮架32c以及太阳齿轮33s以高速模式进行旋转。
[0109]
当第2齿轮架32c以及太阳齿轮33s进行旋转时,行星齿轮33p就会在太阳齿轮33s的周围进行公转。通过行星齿轮33p的公转,第3齿轮架33c进行旋转。
[0110]
主轴81借助锁定凸轮85而与第3齿轮架33c连结。主轴81与锁定凸轮85进行花键结合。锁定凸轮85以能够旋转的方式被支承于锁定环86。锁定环86配置于:第2外罩4b的内侧位置。锁定环86被固定于第2外罩4b。通过第3齿轮架33c的旋转,主轴81进行旋转。
[0111]
主轴81通过轴承83以及轴承84而被支承为能够旋转。主轴81在被支承于轴承83以及轴承84的状态下,能够沿着前后方向进行移动。
[0112]
主轴81具有凸缘部81f。在凸缘部81f与轴承83之间的位置配置有螺旋弹簧87。螺旋弹簧87产生:用于使主轴81朝向前方进行移动的弹力。
[0113]
卡盘82能够对前端工具进行保持。卡盘82连结于主轴81的前部。通过主轴81进行旋转,使得卡盘82进行旋转。卡盘82在保持有前端工具的状态下进行旋转。
[0114]
振动机构40的第1凸轮41以及第2凸轮42分别配置于:第2外罩4b的内侧位置。在前后方向上,第1凸轮41以及第2凸轮42分别配置于:轴承83与轴承84之间的位置。
[0115]
第1凸轮41呈环状。第1凸轮41配置于:主轴81的周围。第1凸轮41被固定于主轴81。第1凸轮41与主轴81一起进行旋转。在第1凸轮41的后表面设置有凸轮齿。第1凸轮41被支承于止动环44。止动环44配置于:主轴81的周围。在前后方向上,止动环44配置于:第1凸轮41与轴承83之间的位置。通过螺旋弹簧87的弹力,止动环44与轴承83的后表面相接触。
[0116]
第2凸轮42呈环状。第2凸轮42配置于:第1凸轮41的后方位置。第2凸轮42配置于:主轴81的周围。第2凸轮42能够与主轴81进行相对旋转。在第2凸轮42的前表面设置有凸轮齿。第2凸轮42的前面的凸轮齿、与第1凸轮41的后表面的凸轮齿相啮合。在第2凸轮42的后表面设置有爪。
[0117]
在前后方向上,在第2凸轮42与轴承84之间的位置配置有支承环45。支承环45配置于:第2外罩4b的内侧为止。支承环45被固定于第2外罩4b。在支承环45的前表面配置有多个钢珠46。在钢珠46与第2凸轮42之间的位置配置有垫圈47。第2凸轮42能够在由小径部402与垫圈47而规定出的空间内,以前后移动被限制的状态而进行旋转。
[0118]
振动切换环43对振动模式与非振动模式进行切换。模式切换环13借助凸轮环48而连结于振动切换环43。模式切换环13与凸轮环48能够一体地进行旋转。振动切换环43能够沿着前后方向进行移动。振动切换环43具有突起部43t。突起部43t被插入于:设置在第2外罩4b的引导孔。振动切换环43能够一边通过设置于第2外罩4b的引导孔而被引导一边沿着前后方向进行移动。能够通过突起部43t而对振动切换环43的旋转进行限制。通过由作业者对模式切换环13进行操作,振动切换环43沿着前后方向进行移动。振动切换环43通过在前
进位置、与比前进位置更靠后方的后退位置之间沿着前后方向进行移动,对振动模式与非振动模式进行切换。通过对模式切换环13进行操作,对振动模式与非振动模式进行切换。
[0119]
振动模式包括:对第2凸轮42的旋转进行限制的状态。非振动模式包括:允许第2凸轮42的旋转的状态。当振动切换环43朝向前进位置进行移动时,对第2凸轮42的旋转进行限制。当振动切换环43朝向后退位置进行移动时,允许第2凸轮42的旋转。
[0120]
在振动模式下,移动到前进位置的振动切换环43的至少一部分与第2凸轮42相接触。通过振动切换环43与第2凸轮42相接触,对第2凸轮42的旋转进行限制。在第2凸轮42的旋转被限制的状态下,当马达6进行驱动时,固定于主轴81的第1凸轮41就会一边与第2凸轮42的凸轮齿相抵碰一边进行旋转。由此,主轴81一边在前后方向上振动一边进行旋转。
[0121]
在非振动模式下,移动到后退位置的振动切换环43从第2凸轮42分离开。通过振动切换环43与第2凸轮42分离开,允许第2凸轮42的旋转。在第2凸轮42的旋转被允许的状态下,当马达6进行驱动时,第2凸轮42就会与第1凸轮41以及主轴81一起进行旋转。由此,主轴81不在前后方向上进行振动地进行旋转。
[0122]
振动切换环43配置于:第1凸轮41以及第2凸轮42的周围。另外,振动切换环43具有:与第2凸轮42的后表面相对置的对置部43s。对置部43s从振动切换环43的后部朝向径向内侧突出出来。
[0123]
当对模式切换环13进行操作而使得振动切换环43朝向前进位置进行移动时,第2凸轮42的后表面的爪就会与振动切换环43的对置部43s相接触。由此,对第2凸轮42的旋转进行限制。这样,通过对模式切换环13进行操作而使得振动切换环43朝向前进位置进行移动,振动机构40被切换为振动模式。
[0124]
当对模式切换环13进行操作而使得振动切换环43朝向后退位置进行移动时,振动切换环43的对置部43s就会从第2凸轮42分离开。由此,允许第2凸轮42的旋转。这样,通过对模式切换环13进行操作而使得振动切换环43朝向后退位置进行移动,振动机构40被切换为非振动模式。
[0125]
[拨盘]
[0126]
图6是从前方观察实施方式所涉及的拨盘16的图。图7是表示实施方式所涉及的拨盘16以及照明单元14的截面图。如图1、图2、图3、图4、图6、以及图7所示,拨盘16配置于:蓄电池保持部23的前部的右部。照明单元14配置于:蓄电池保持部23的前部的左部。
[0127]
拨盘16的至少一部分配置于:形成在蓄电池保持部23的拨盘开口28。拨盘开口28形成于:蓄电池保持部23的前部的右部。
[0128]
拨盘16配置于:控制器18的前方位置。拨盘16呈筒状。拨盘16由作业者进行操作。在拨盘16的表面设置有多个凸部16t。凸部16t具有防滑功能。拨盘16的前部以及上部分别配置于:比蓄电池保持部23的表面更靠外侧的位置。
[0129]
拨盘16以沿着左右方向延伸的拨盘轴dx为中心而进行旋转。如上述那样,马达6的旋转轴ax沿着前后方向延伸。在实施方式中,马达6的旋转轴ax、与平行于拨盘轴dx的轴相正交。
[0130]
驱动钻1具有:配置于拨盘16的内侧位置的杆161、被支承于杆161的永磁体162、被支承于杆161的凸轮163、以及配置于杆161的周围位置的螺旋弹簧164。
[0131]
杆161在控制器18的前方被保持于:蓄电池保持部23的至少一部分。杆161的左端
部以及右端部分别被保持于:蓄电池保持部23。
[0132]
拨盘16配置于:杆161的周围。拨盘16以能够旋转的方式支承于杆161。拨盘16能够分别沿着以拨盘轴dx为中心的正转方向以及反转方向而旋转360[
°
]以上。
[0133]
在拨盘16的左表面设置有凹部16l。在凹部16l的内侧设置有凸轮突起16a。在拨盘16的右表面设置有凹部16r。在凹部16r的内侧设置有突起部16b。另外,在拨盘16的左表面以及右表面分别设置有环状的凸部16c。
[0134]
永磁体162与拨盘16一起进行旋转。永磁体162在与拨盘轴dx平行的方向上,配置于:与拨盘16不同的位置。在实施方式中,永磁体162配置于:拨盘16的右侧位置。永磁体162呈筒状。杆161的至少一部分配置于:永磁体162的内侧位置。永磁体162配置于:杆161的周围。永磁体162通过例如粘合剂而被固定于拨盘16。
[0135]
凸轮163在与拨盘轴dx平行的方向上,配置于:与拨盘16不同的位置。在实施方式中,凸轮163配置于:拨盘16的左侧位置。凸轮163呈筒状。杆161的至少一部分配置于:凸轮163的内侧位置。凸轮163配置于:杆161的周围。凸轮163能够相对于杆161而沿着左右方向进行移动。在凸轮163的右表面设置有凸轮突起163a。在凸轮163的外表面设置有2个凸部163t。
[0136]
螺旋弹簧164在与拨盘轴dx平行的方向上,配置于:与拨盘16不同的位置。在实施方式中,螺旋弹簧164配置于:拨盘16的左侧位置。杆161的至少一部分配置于:螺旋弹簧164的内侧位置。螺旋弹簧164配置于:杆161的周围。螺旋弹簧164的至少一部分配置于:凸轮163的内侧位置。
[0137]
蓄电池保持部23具有:供拨盘16配置的中央凹部165、供凸轮163配置的左凹部166、以及供永磁体162配置的右凹部167。
[0138]
杆161的左端部被保持于:左凹部166的内表面的至少一部分。杆161的右端部被保持于:右凹部167的内表面的至少一部分。
[0139]
凸轮163的凸部163t被插入于:形成在左凹部166的内侧位置的沟168。由此,对凸轮163的旋转进行限制。
[0140]
凸轮163的右部被插入于:拨盘16的凹部16l。螺旋弹簧164的右部配置于:凸轮163的内侧位置。螺旋弹簧164的左部被支承于:左凹部166的内表面的至少一部分。通过将螺旋弹簧164支承于左凹部166的内表面的至少一部,对螺旋弹簧164的旋转进行限制。螺旋弹簧164产生:用于使凸轮163朝向右方进行移动的弹力。
[0141]
当由作业者对拨盘16进行操作时,在通过螺旋弹簧164而将凸轮163压靠于拨盘16的状态下,拨盘16就会相对于凸轮163而进行旋转。凸轮突起16a与凸轮突起163a相抵碰的同时拨盘16进行旋转。由此,在拨盘16的旋转中会产生咔哒感。
[0142]
永磁体162的左部被插入于:拨盘16的凹部16r。以将突起部16b插入于:设置在永磁体162的左部位置的缺口的方式,将永磁体162的左部插入于拨盘16的凹部16r。由此,对拨盘16与永磁体162之间的相对旋转进行限制。永磁体162与拨盘16一起进行旋转。
[0143]
在拨盘16的左表面以及右表面分别设置有环状的凸部16c。在蓄电池保持部23设置有:对凸部16c进行覆盖的罩部169。通过凸部16c以及罩部169,能够抑制:异物从外壳2与拨盘16之间侵入至蓄电池保持部23的内部空间的情形。
[0144]
[控制器]
[0145]
图8是表示实施方式所涉及的驱动钻1的框图。如图8所示,驱动钻1具备:传感器电路基板61e、触发器杆10、正反转切换杆11、速度切换杆12、模式切换环13、拨盘16、手动开关17、操作装置24、触发信号生成电路51、正反转操作传感器52、速度操作传感器53、模式操作传感器54、拨盘操作传感器55、加速度传感器56、控制器18、马达6、以及显示装置25。
[0146]
控制器18对作用于马达6的扭矩进行计算。控制器18能够基于被供给于线圈61d的驱动电流值、与由传感器电路基板61e的旋转检测元件而检测出的转子62的转速,来对作用于马达6的扭矩进行计算。
[0147]
如图4所示,触发信号生成电路51配置于:把持部22的内部。触发信号生成电路51基于触发器杆10的操作量,而生成触发信号。在触发信号生成电路51中生成的触发信号被输出到控制器18。控制器18基于来自触发信号生成电路51的触发信号,而对马达6进行驱动。
[0148]
正反转操作传感器52用于对正反转切换杆11的操作状态进行检测。正反转操作传感器52用于对沿着左右方向进行移动的正反转切换杆11的位置进行检测。
[0149]
正反转操作传感器52的检测数据被输出到控制器18。控制器18基于正反转操作传感器52的检测数据,而对速度切换杆12的位置进行检测。控制器18能够基于正反转操作传感器52的检测数据,而判定:马达6的旋转方向是被设定为正转方向还是被设定为反转方向。
[0150]
速度操作传感器53用于对速度切换杆12的操作状态进行检测。如图5所示,在速度切换环34设置有永磁体34m。速度操作传感器53配置于:速度切换环34的下方位置。速度操作传感器53包括:霍尔元件那样的磁传感器。当对速度切换杆12进行操作时,永磁体34m就会与速度切换杆12以及速度切换环34一起沿着前后方向进行移动。速度操作传感器53用于对所移动的永磁体34m的磁场的变化进行检测。
[0151]
速度操作传感器53的检测数据被输出到控制器18。控制器18基于速度操作传感器53的检测数据,而对速度切换杆12的位置进行检测。控制器18能够基于速度操作传感器53的检测数据,而判定:减速机构30是被设定为高速模式还是被设定为低速模式。
[0152]
模式操作传感器54用于对模式切换环13的操作状态进行检测。如图5所示,设置有:与模式切换环13一体地进行旋转的模式检测用环49。模式检测用环49配置于:模式切换环13的内侧位置。在模式检测用环49设置有永磁体49m。模式操作传感器54配置于:模式检测用环49的下方位置。模式操作传感器54包括:霍尔元件那样的磁传感器。当对模式切换环13进行操作时,永磁体49m就会与模式切换环13以及模式检测用环49一起进行旋转。模式操作传感器54用于对所旋转的永磁体49m的磁场的变化进行检测。
[0153]
模式操作传感器54的检测数据被输出到控制器18。控制器18基于模式操作传感器54的检测数据而对模式切换环13的旋转方向的位置进行检测。控制器18能够基于模式操作传感器54的检测数据,而判定:振动机构40是被设定为振动模式还是被设定为非振动模式。
[0154]
拨盘操作传感器55用于对拨盘16的操作状态进行检测。拨盘操作传感器55包括:霍尔元件那样的磁传感器。拨盘操作传感器55用于对永磁体162进行检测。拨盘操作传感器55配置于:永磁体162的后方位置。当对拨盘16进行操作时,永磁体162就会与拨盘16一起进行旋转。拨盘操作传感器55用于对所旋转的永磁体162的磁场的变化进行检测。
[0155]
永磁体162具有:在拨盘轴dx的周向上交替地配置的n极和s极。作业者能够使拨盘
16分别朝向以拨盘轴dx为中心的正转方向以及反转方向进行旋转。通过拨盘16进行旋转,永磁体162与拨盘16一起进行旋转。
[0156]
在拨盘16进行旋转,而使得s极与拨盘操作传感器55相对置的状态下,永磁体162与拨盘操作传感器55之间的磁力线会从拨盘操作传感器55朝向永磁体162进行移动。在拨盘16进行旋转,而使得n极以及配置于比n极更靠上方位置的s极分别与拨盘操作传感器55相对置的状态下,永磁体162与拨盘操作传感器55之间的磁力线会从n极朝向s极进行移动。在拨盘16进行旋转、而使得n极与拨盘操作传感器55相对置的状态下,永磁体162与拨盘操作传感器55之间的磁力线会从永磁体162朝向拨盘操作传感器55进行移动。在拨盘16进行旋转,而使得s极以及配置于比s极更靠上方位置的n极分别与拨盘操作传感器55相对置的状态下,永磁体162与拨盘操作传感器55之间的磁力线会从n极朝向s极进行移动。
[0157]
这样,在永磁体162与拨盘操作传感器55之间,磁力线进行移动的方向基于拨盘16的旋转角度而发生变化。亦即,永磁体162与拨盘操作传感器55之间的磁场基于拨盘16的旋转角度而发生变化。另外,永磁体162与拨盘操作传感器55之间的磁场基于拨盘16的旋转方向而发生变化。拨盘操作传感器55通过对磁场的变化进行检测,能够对拨盘16的旋转方向以及旋转角度进行检测。
[0158]
拨盘操作传感器55的检测数据被输出到控制器18。控制器18能够基于拨盘操作传感器55的检测数据,而判定拨盘16的旋转方向以及旋转速度。另外,拨盘操作传感器55的检测数据包括:离合器模式下的离合器阈值。在离合器模式下,控制器18基于拨盘操作传感器55的检测数据,而设定扭矩阈值。
[0159]
手动开关17通过由作业者进行操作,而生成操作数据。由手动开关17生成的操作数据被发送到控制器18。手动开关17的操作数据包括:离合器模式下的离合器阈值。在离合器模式下,控制器18基于手动开关17的操作数据,而设定扭矩阈值。
[0160]
操作装置24通过由作业者进行操作,而生成操作数据。由操作装置24生成的操作数据被发送到控制器18。操作装置24的操作数据包括:钻孔模式或者离合器模式。控制器18基于操作装置24的操作数据,而设定钻孔模式或者离合器模式。
[0161]
[驱动钻的动作]
[0162]
图9是表示实施方式所涉及的驱动钻1的使用例的图。图9示出:将前端工具70装配于输出部8、并使用驱动钻1来实施螺钉紧固作业的状态。
[0163]
在以下的说明中,示出如下例子:驱动钻1在被设定为离合器模式的状态下实施螺钉紧固作业。作业者在以将振动机构40设定为非振动模式的方式对模式切换环13进行操作的状态下,能够对操作装置24进行操作,来选择离合器模式。
[0164]
离合器模式是:当在马达6的驱动中作用于马达6的扭矩超过扭矩阈值时,使马达6停止的驱动模式。作业者在选择了离合器模式的情况下,能够对拨盘16以及手动开关17的至少一方进行操作,而设定扭矩阈值。
[0165]
拨盘16的操作方向、与手动开关17的操作方向是不同的。拨盘16的操作方向是:以拨盘轴dx为中心的旋转方向。手动开关17的操作方向是:前后方向。由于拨盘16的操作方向、与手动开关17的操作方向是不同的,所以,作业者在处于例如难以操作拨盘16的作业状况的情况下,能够使用手动开关17来变更扭矩阈值。作业者在处于例如难以操作手动开关17的作业状况的情况下,能够使用拨盘16来变更扭矩阈值。
[0166]
扭矩阈值能够被详细地设定。作为一例,控制器18能够设定40个级别的扭矩阈值。
[0167]
在使用拨盘16来设定扭矩阈值的情况下,例如,当拨盘16朝向正转方向旋转45[
°
]时,扭矩阈值就会上升1个级别。当拨盘16朝向反转方向旋转45[
°
]时,扭矩阈值就会下降1个级别。在实施方式中,拨盘16能够分别朝向以拨盘轴dx为中心的正转方向以及反转方向而旋转360[
°
]以上。因而,作业者通过使拨盘16朝向正转方向或者反转方向旋转45[
°
],能够详细地设定40个级别的扭矩阈值。
[0168]
此外,用于使扭矩阈值发生1个级别的变化的拨盘16的旋转角度可以不是45[
°
],也可以小于45[
°
],还可以大于45[
°
]。
[0169]
在使用手动开关17来设定扭矩阈值的情况下,例如,在正反转切换杆11朝向左方进行了移动的第1操作状态下,通过对手动开关17进行1次推压操作,扭矩阈值上升1个级别。在正反转切换杆11朝向左方进行了移动的第1操作状态下,通过对手动开关17进行任意多次的推压操作,扭矩阈值上升多个级别。在正反转切换杆11朝向右方进行了移动的第2操作状态下,通过对手动开关17进行1次推压操作,扭矩阈值下降1个级别。在正反转切换杆11朝向右方进行了移动的第2操作状态下,通过对手动开关17进行任意多次的推压操作,扭矩阈值下降多个级别。
[0170]
控制器18能够基于正反转操作传感器52的检测数据,而判定:正反转切换杆11是处于第1操作状态还是处于第2操作状态。因此,控制器18能够基于正反转操作传感器52的检测数据、与来自手动开关17的操作数据,而使扭矩阈值上升或下降。
[0171]
此外,例如,在正反转切换杆11朝向左方进行了移动的第1操作状态下,通过对手动开关17进行1次推压操作,扭矩阈值可以上升2个级别,还可以上升任意的多个级别。在正反转切换杆11朝向右方进行了移动的第2操作状态下,通过对手动开关17进行1次推压操作,扭矩阈值可以下降2个级别,还可以下降任意的多个级别。
[0172]
此外,在正反转切换杆11朝向左方进行了移动的第1操作状态下,通过对手动开关17进行推压操作,扭矩阈值可以下降。在正反转切换杆11朝向右方进行了移动的第2操作状态下,通过对手动开关17进行推压操作,扭矩阈值可以上升。
[0173]
此外,扭矩阈值的级别数可以不是40个级别,也可以少于40个级别,还可以多于40个级别。
[0174]
在离合器模式下,作业者在进行螺钉紧固作业之前,例如对拨盘16进行操作,来设定扭矩阈值。
[0175]
控制器18使由拨盘16设定的扭矩阈值显示于显示装置25。
[0176]
在设定了扭矩阈值之后,作业者对触发器杆10进行操作,而使得马达6启动。控制器18能够基于触发器杆10的操作量,而对马达6的转速进行控制。控制器18基于传感器电路基板61e的旋转检测元件的检测数据,而对马达6进行控制,以使得马达6以基于触发器杆10的操作量而被规定的目标旋转速度进行旋转。
[0177]
控制器18对作用于马达6的扭矩进行计算。控制器18能够基于被供给于线圈61d的驱动电流值、与由传感器电路基板61e的旋转检测元件而检测出的转子62的转速,来对作用于马达6的扭矩进行计算。
[0178]
当在马达6的驱动中计算出的作用于马达6的扭矩超过所设定的扭矩阈值时,控制器18使马达6停止。
[0179]
如图9所示,在螺丝被充分地拧入到作业对象之前、马达6停止的情况下,作业者能够对手动开关17进行操作,而使得扭矩阈值上升。作业者能够保持在用右手握持着驱动钻1的把持部22的状态下而使用驱动钻1的作业姿势不变地,使用右手的食指等,来对手动开关17进行操作。亦即,作业者能够保持使用驱动钻1的作业姿势不变地,用一只手来调整扭矩阈值。
[0180]
另外,特别是,如果此次的手动开关17为振动驱动钻,则其效果能够被显著地发挥出。例如,有时通过设置于第2外罩4b前端的离合器环,而以电气方式进行驱动钻1的离合器级别数的变更。在该情况下,由于通过环状的部件而以电气方式进行,所以,假想会有如下不良情况,即:振动驱动钻在进行振动作业时会导致环状的部件破损的不良情况。但是,在本构成中,通过手动开关17这样的按钮而进行离合器级别数的变更,所以,能够减少破损。特别是,振动驱动钻中的振动不同于螺钉紧固时的挥动、或冲击起子中的冲击动作,是在较短的周期内进行多次。当以电气方式进行离合器级别数的变更时,应该采用该器件难以破损那样的构造,本构成已经在振动驱动钻中进行了研究/采用。
[0181]
[效果]
[0182]
如以上说明的那样,在实施方式中,驱动钻1具备:马达6;输出部8,该输出部8配置于比马达6更靠前方的位置,并且通过马达6的旋转力而进行旋转;触发器杆10,对该触发器杆10进行操作,以便使马达6进行启动;正反转切换杆11,对该正反转切换杆11进行操作,以便对马达6的旋转方向进行切换;作为第1操作部件的拨盘16,对该第1操作部件进行操作,以便对马达6的驱动条件进行变更;作为第2操作部件的手动开关17,该第2操作部件配置于比该拨盘16更靠上方的位置,并且对该第2操作部件进行操作,以便对马达6的驱动条件进行变更;以及控制器18,该控制器18基于拨盘16以及手动开关17的至少一方的操作,而对马达6的驱动条件进行设定。
[0183]
在上述构成中,除了拨盘16之外,还设置有手动开关17。手动开关17配置于:比拨盘16更靠上方的位置。在对马达6的驱动条件进行变更的情况下,作业者能够保持使用驱动钻1的作业姿势不变地,对手动开关17进行操作,来顺畅地对马达6的驱动条件进行变更。
[0184]
在实施方式中,驱动钻1具备外壳2,该外壳2具有:用于对马达6进行收容的马达收容部21、从马达收容部21朝向下方延伸的把持部22、以及配置于把持部22的下部位置的蓄电池保持部23。拨盘16配置于:蓄电池保持部23,手动开关17配置于:把持部22或者马达收容部21。
[0185]
在上述构成中,在对马达6的驱动条件进行变更的情况下,作业者能够保持在用手握持着把持部22的状态下使用驱动钻1的作业姿势不变地,对手动开关17进行操作,来顺畅地对马达6的驱动条件进行变更。
[0186]
在实施方式中,触发器杆10配置于:把持部22的前部。手动开关17配置于:触发器杆10的上方。
[0187]
在上述构成中,在对马达6的驱动条件进行变更的情况下,作业者能够保持在例如用右手握持着把持部22的状态下使用驱动钻1的作业姿势不变地,使用右手的食指等,来对手动开关17进行操作。亦即,作业者能够保持使用驱动钻1的作业姿势不变地,用一只手来对马达6的驱动条件进行变更。
[0188]
在实施方式中,当在马达6的驱动中作用于马达6的扭矩超过扭矩阈值时,控制器
18使马达6停止。驱动条件包括:扭矩阈值。
[0189]
在上述构成中,在驱动钻1被设定为离合器模式的状态下,通过对手动开关17进行操作,来变更扭矩阈值。
[0190]
在实施方式中,手动开关17包括:推压式开关。通过对手动开关17进行1次推压操作,使扭矩阈值以规定量进行变更。
[0191]
在上述构成中,作业者能够通过对作为推压式开关的手动开关17进行推压操作,使扭矩阈值以规定量进行变更。通过进行1次推压操作,使扭矩阈值以作为规定量的例如1个级别进行变更。
[0192]
在实施方式中,通过在正反转切换杆11处于第1操作状态时对手动开关17进行推压操作,扭矩阈值上升,通过在正反转切换杆11处于第2操作状态时对手动开关17进行推压操作,扭矩阈值下降。
[0193]
在上述构成中,能够通过将正反转切换杆11的操作状态与手动开关17的操作状态组合起来,使得扭矩阈值上升或下降。
[0194]
在实施方式中,正反转切换杆11与手动开关17的至少一部分配置在:相同高度。
[0195]
在上述构成中,作业者能够例如用一只手来对正反转切换杆11与手动开关17进行操作。
[0196]
在实施方式中,拨盘16的操作方向、与手动开关17的操作方向是不同的。
[0197]
在上述构成中,作业者能够根据作业状况而对拨盘16以及手动开关17中的容易操作那方的操作部件进行操作,来对马达6的驱动条件进行操作。作业者在处于例如难以操作拨盘16的作业状况的情况下,能够使用手动开关17来变更扭矩阈值。作业者在处于例如难以操作手动开关17的作业状况的情况下,能够使用拨盘16来变更扭矩阈值。
[0198]
在实施方式中,拨盘16能够旋转360[
°
]以上。
[0199]
在上述构成中,由于拨盘16能够旋转360[
°
]以上,所以,作业者能够操作性良好地对马达6的驱动条件进行变更。
[0200]
在实施方式中,驱动钻1具备显示装置25。控制器18使马达6的驱动条件显示于显示装置25。
[0201]
在上述构成中,作业者能够通过观察显示装置25来识别马达6的驱动条件。
[0202]
[其他实施方式]
[0203]
如图8所示,驱动钻1具备加速度传感器56。加速度传感器56用于对例如作用于外壳2的加速度进行检测。当加速度传感器56的检测值超过加速度阈值时,控制器18使马达6停止。驱动条件包括加速度阈值。可以通过手动开关17的操作来变更加速度阈值。
[0204]
在使用驱动钻1的螺钉紧固作业中,有时过度的反作用力会作用于驱动钻1,导致驱动钻1克服作业者的力而较大地活动。加速度传感器56用于对驱动钻1的活动进行检测。控制器18在基于加速度传感器56的检测数据而判定为作用于驱动钻1的加速度超过加速度阈值的情况下,使马达6停止。
[0205]
作业者能够对手动开关17进行操作,而根据例如作业状况来调整加速度阈值。
[0206]
图10是表示从后方观察变形例所涉及的驱动钻1b的立体图。手动开关17b配置于:比拨盘16更靠上方的位置。在图10所示的例子中,手动开关17b设置于:后罩3的后表面。
[0207]
在图10所示的例子中,也是在对马达6的驱动条件进行变更的情况下,作业者能够
保持在用手握持着把持部22的状态下使用驱动钻1b的作业姿势不变地,对手动开关17b进行操作,来顺畅地对马达6的驱动条件进行变更。作业者能够保持在例如用右手握持着把持部22的状态下使用驱动钻1b的作业姿势不变地,使用右手的食指等,来对手动开关17b进行操作。
[0208]
如以上说明的那样,在图10所示的例子中,作为振动驱动钻的驱动钻1b具备:马达6;输出部8,该输出部8配置于比马达6更靠前方的位置,并且通过马达6的旋转力而进行旋转;振动机构40,该振动机构40配置于马达6与输出部8之间的位置,能够对使输出部8在前后方向上进行振动的情况、与使输出部8不在前后方向上进行振动的情况进行切换;触发器杆10,对该触发器杆10进行操作,以便使马达6进行启动;正反转切换杆11,对该正反转切换杆11进行操作,以便对马达6的旋转方向进行切换;作为马达外壳的马达收容部21以及后罩3,该马达外壳用于对马达6进行收容;作为把持外壳的把持部22,该把持外壳从马达外壳朝向下方延伸;作为操作按钮的手动开关17b,该操作按钮配置于作为马达外壳的一部分的后罩3,并且对该操作按钮进行操作,以便对马达6的驱动条件进行变更;以及控制器18,该控制器18基于操作按钮的操作,而对马达6的驱动条件进行设定。
[0209]
在上述构成中,在作为马达外壳的一部分的后罩3配置有:作为操作按钮的手动开关17b。在对马达6的驱动条件进行变更的情况下,作业者能够保持使用驱动钻1b的作业姿势不变地,对操作按钮进行操作,来顺畅地对马达6的驱动条件进行变更。
[0210]
图11是用于对变形例所涉及的马达6的驱动条件进行说明的图。在上述的实施方式中,马达6的驱动条件是扭矩阈值。马达6的驱动条件可以包括:从对触发器杆10进行操作之后至马达6的转速达到规定值为止的马达6的动作或者时间。马达6的驱动条件可以包括:作用于马达6的扭矩超过扭矩阈值之后至马达6停止为止的马达6的动作或者时间。
[0211]
在图11所示的图表中,横轴表示:从对触发器杆10进行操作起经过的时间,纵轴表示马达6的转速。在时间点t0,对触发器杆10进行操作。马达6的转速基于触发器杆10的操作量而上升到规定值。在时间点t1,马达6的转速达到规定值。在时间点t2,作用于马达6的扭矩超过扭矩阈值,马达6开始进行停止动作。在时间点t3,马达6停止。
[0212]
可以通过手动开关17(17b)的操作,来变更:从对触发器杆10进行操作之后至马达6的转速达到规定值为止的马达6的时间t1。也可以通过手动开关17(17b)的操作,来变更:作用于马达6的扭矩超过扭矩阈值之后至马达6停止为止的马达6的时间t2。时间t1是:时间点t0至时间点t1的时间。时间t2是:时间点t2至时间点t3的时间。
[0213]
另外,可以通过手动开关17(17b)的操作,来变更:从对触发器杆10进行操作之后至马达6的转速达到规定值为止的马达6的动作。也可以通过手动开关17(17b)的操作,来变更:作用于马达6的扭矩超过扭矩阈值之后至马达6停止为止的马达6的动作。亦即,可以变更时间t1内的马达6的动作,还可以变更时间t2内的马达6的动作。作为时间t1内的马达6的动作,而举例示出:马达6的转速的上升率。作为时间t2内的马达6的动作,而举例示出:马达6的转速的下降率。
[0214]
在上述构成中,作业者能够对手动开关17(17b)进行操作,而根据例如作业者的喜好来调整马达6的驱动条件。
[0215]
在上述的实施方式中,使用了:作为驱动钻1(1b)的电源而被装配于蓄电池装配部5的蓄电池组20。作为驱动钻1(1b)的电源,还可以使用:商用电源(交流电源)。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1