模块化构造的工作站的制作方法
本发明涉及一种模块化构造的工作站。
背景技术:
1、为了组装用于机动车的内燃机的排气设备或排气设备的部件,要通过焊接相互连接的部件经由承载其的工件载体固定在工作站的可在至少一个运动模式、例如旋转运动模式中运动的工作载体上并且通过使相应工作载体的运动而被定位为,使得例如对于焊接机器人存在对要焊接的区域的接近可能性。
技术实现思路
1、本发明的目的是以扩展的应用可能性提供一种工作站,特别是用于在组装用于机动车的内燃机的排气设备或排气设备的部件时执行焊接过程。
2、根据本发明,该目的通过根据权利要求1所述的模块化构造的工作站实现。该模块化构造的工作站包括:
3、-工作模块载体,所述工作模块载体具有至少一个工作模块载体固定区域,以用于将工作模块固定在工作模块载体上,
4、-多个优选不同的工作模块,所述工作模块具有工作模块固定区域,以用于可松脱地固定在工作模块载体的工作模块载体固定区域上,其中,所述工作模块中的至少一个工作模块包括在至少一个运动模式中可运动的工作载体和用于驱动工作载体以在至少一个运动模式中运动的工作载体驱动器。
5、由于工作站的模块化设计(其中为产生工作载体的运动所需的工作载体驱动器集成到相应的工作模块中),存在如下可能性,即以简单的方式将特别适合于不同工作过程的不同工作模块固定在所述工作模块载体上,而不需要将驱动部件彼此耦联或在从工作模块载体上松脱工作模块时将驱动部件彼此脱耦。因此,工作站可以快速适应不同工作过程。
6、为了能够利用根据本发明构造的工作站同时执行不同工作过程,提出:在工作模块载体上设置至少两个工作模块载体固定区域,以用于分别固定一个工作模块。
7、在此为了避免在同时执行不同或多个工作过程时相互干扰,有利的是,在工作模块载体的彼此相对置的各侧上设置至少两个工作模块载体固定区域。为了将工作模块可变地附接到工作模块载体上,提出:至少两个工作模块载体固定区域彼此基本上相同。
8、所述工作模块中的至少一个工作模块可以是单轴工作模块,其中,单轴工作模块的工作载体可围绕旋转轴线旋转,并且单轴工作模块的工作载体驱动器包括用于驱动工作载体以围绕旋转轴线旋转的旋转驱动器。
9、在此,为了可简单实现地构造,旋转驱动器可以包括优选可电运行的旋转驱动马达。
10、此外,所述工作模块中的至少一个工作模块可以是双轴工作模块,其中,所述双轴工作模块的工作载体可围绕旋转轴线旋转并且围绕偏转轴线可偏转,并且所述双轴工作模块的工作载体驱动器包括用于驱动工作载体以围绕旋转轴线旋转的旋转驱动器并且包括用于驱动工作载体以围绕偏转轴线偏转的偏转驱动器。
11、在此,为了可简单实现地构造,旋转驱动器也可以包括优选可电运行的旋转驱动马达或/和偏转驱动器可以包括优选可电运行的偏转驱动马达。
12、为了运动过程的限定可执行性,提出:偏转轴线不平行于旋转轴线,或/和偏转轴线与旋转轴线相交,优选以大约90°的角度相交。
13、双轴工作模块可以包括:
14、-旋转组件,其中,该旋转组件包括旋转驱动器和工作载体,
15、-偏转组件,其中,该偏转组件包括工作模块固定区域和偏转驱动器。
16、在此,旋转组件可以通过偏转驱动器可偏转地支承在偏转组件上以围绕偏转轴线偏转。
17、为了能够将不同工作模块任意地安设到不同工作模块载体固定区域上,所有工作模块可以具有彼此基本上相同的工作模块固定区域。
18、为了在要执行的工作过程期间稳定地定位要在根据本发明的工作站上加工的工件,有利的是,与至少一个工作模块载体固定区域相配设地设置配合支承单元。在此,配合支承单元可以具有可围绕配合支承旋转轴线旋转的配合支承载体,其中,至少一个配合支承单元的配合支承旋转轴线在工作模块固定在配设给所述配合支承单元的工作模块载体固定区域上时基本上对应于该工作模块的旋转轴线。
19、在使用根据本发明的工作站时进一步增加的可变性可以通过以下方式实现:与工作模块载体固定区域相配设地设置的至少一个配合支承单元优选在配合支承旋转轴线的方向上可相对于配设的工作模块载体固定区域运动。
20、为了将一个或多个工件安设在工作载体上,可以设置至少一个工件载体组件,其中,至少一个工件载体组件包括用于保持在工作载体上的第一固定区域和用于接纳至少一个工件的工件接纳区域。
21、在此可以通过以下方式支持稳定的保持:至少一个工件载体组件包括用于保持在配合支承单元上的第二固定区域。
22、为了能够与不同构造类型的工作模块结合地使用工件载体组件,提出:至少一个包括第一固定区域和第二固定区域的工件载体组件包括具有第一固定区域的第一组件部分和要与第一组件部分可松脱地连接的并提供第二固定区域的第二组件部分。
技术特征:
1.模块化构造的工作站,包括:
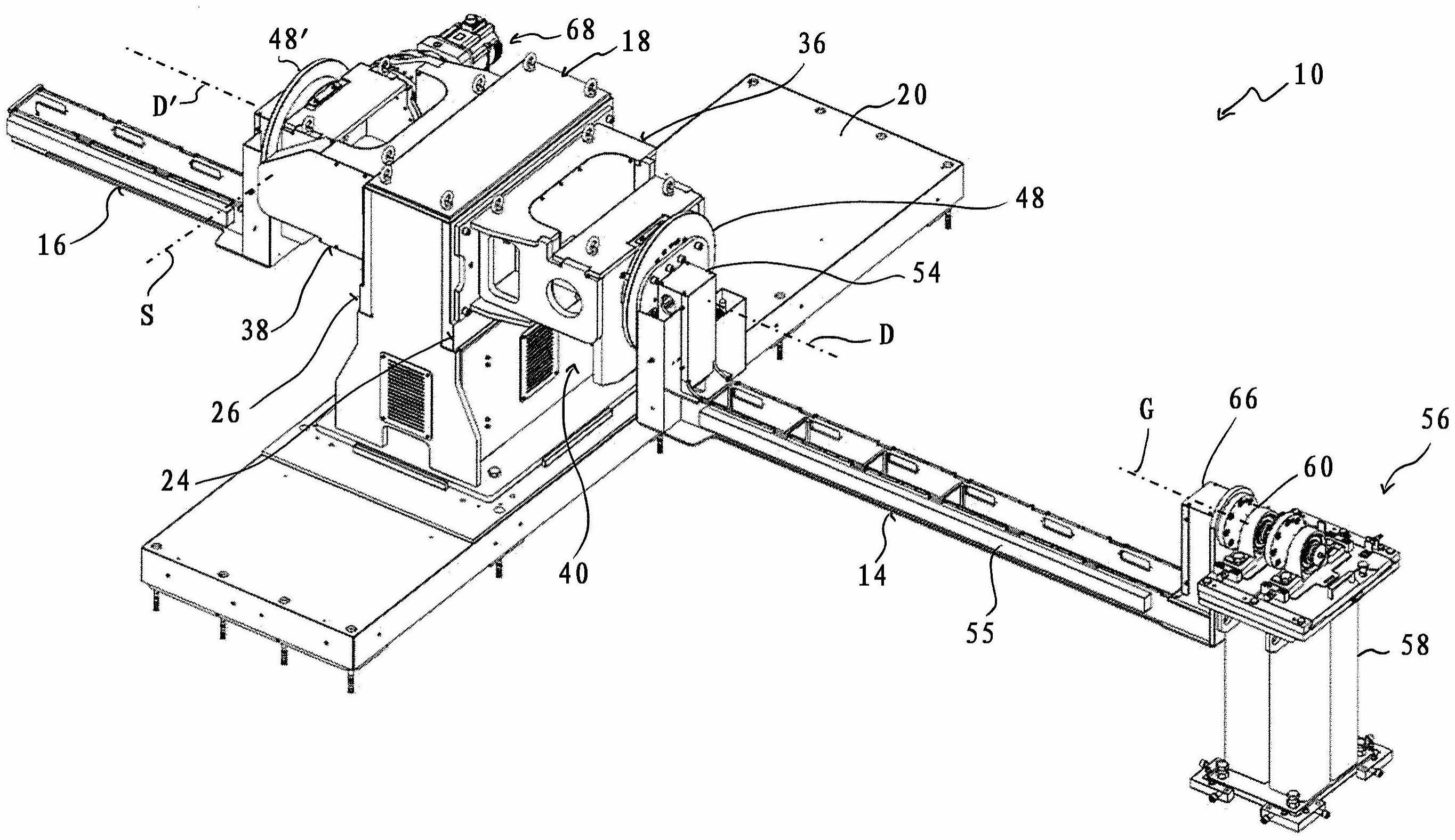
2.根据权利要求1所述的工作站,其特征在于,在工作模块载体(18)上设置至少两个工作模块载体固定区域(24、26),以用于分别固定一个工作模块(36、38)。
3.根据权利要求2所述的工作站,其特征在于,至少两个工作模块载体固定区域(24、26)设置在工作模块载体(18)的彼此相对置的各侧(20、22)上,或/和至少两个工作模块载体固定区域(24、26)彼此基本上相同。
4.根据权利要求1至3中任一项所述的工作站,其特征在于,所述工作模块(36、36)中的至少一个工作模块是单轴工作模块(40),单轴工作模块(40)的工作载体(48)能围绕旋转轴线(d)旋转,并且单轴工作模块(40)的工作载体驱动器(50)包括用于驱动工作载体(48)以围绕旋转轴线(d)旋转的旋转驱动器(53)。
5.根据权利要求4所述的工作站,其特征在于,旋转驱动器(53)包括优选可电运行的旋转驱动马达。
6.根据权利要求1至5中任一项所述的工作站,其特征在于,所述工作模块(36、38)中的至少一个工作模块是双轴工作模块(68),双轴工作模块(68)的工作载体(48')能围绕旋转轴线(d')旋转并且能围绕偏转轴线(s)偏转,并且双轴工作模块(68)的工作载体驱动器(50')包括用于驱动工作载体(48)以围绕旋转轴线(d')旋转的旋转驱动器(53')并且包括用于驱动工作载体(48')以围绕偏转轴线(s)偏转的偏转驱动器(82)。
7.根据权利要求6所述的工作站,其特征在于,旋转驱动器(53')包括优选能电运行的旋转驱动马达,或/和偏转驱动器(82)包括优选能电运行的偏转驱动马达。
8.根据权利要求6或7所述的工作站,其特征在于,偏转轴线(s)不平行于旋转轴线(d'),或/和偏转轴线(s)与旋转轴线(d')相交,优选以大约90度的角度相交。
9.根据权利要求6至8中任一项所述的工作站,其特征在于,双轴工作模块(68)包括旋转组件(76),旋转组件(76)包括旋转驱动器(53')和工作载体(48'),双轴工作模块(68)包括偏转组件(80),偏转组件(80)包括工作模块固定区域(70)和偏转驱动器(82),并且旋转组件(76)通过偏转驱动器(82)可偏转地承载在偏转组件(80)上,以用于围绕偏转轴线(s)偏转。
10.根据权利要求1至9中任一项所述的工作站,其特征在于,所有工作模块(36、38)具有彼此基本上相同的工作模块固定区域(42、70)。
11.根据权利要求1至10中任一项所述的工作站,其特征在于,与至少一个工作模块载体固定区域(24、26)相配设地设置配合支承单元(56、84)。
12.根据权利要求11所述的工作站,其特征在于,配合支承单元(56、84)具有能围绕配合支承旋转轴线(g、g')旋转的配合支承载体(60、88),所述至少一个配合支承单元(56、84)的配合支承旋转轴线(g,g')在工作模块(36、38)固定在配设给所述配合支承单元的工作模块载体固定区域(24、26)上时对应于该工作模块(36、38)的旋转轴线(d、d')。
13.根据权利要求11或12所述的工作站,其特征在于,与工作模块载体固定区域(26)相配设地设置的至少一个配合支承单元(84)优选在配合支承旋转轴线(g')的方向上能相对于配设的工作模块载体固定区域(26)运动。
14.根据权利要求1至13中任一项所述的工作站,其特征在于,设有至少一个工件载体组件(14、16),所述至少一个工件载体组件(14、16)具有用于保持在工作载体(48、48')上的第一固定区域(54、54')和用于接纳至少一个工件(w)的工件接纳区域(55)。
15.根据权利要求14和权利要求11、12或13所述的工作站,其特征在于,至少一个工件载体组件(14、16)包括用于保持在配合支承单元(56、84)上的第二固定区域(66、66')。
16.根据权利要求15所述的工作站,其特征在于,包括第一固定区域(54')和第二固定区域(66')的至少一个工件载体组件(16)包括具有第一固定区域(54')的第一组件部分(90)和要与第一组件部分(92)可松脱地连接的并提供第二固定区域(66')的第二组件部分(92)。
技术总结
本发明涉及一种模块化构造的工作站,其包括:工作模块载体(18),具有至少一个工作模块载体固定区域(24、26),以用于将工作模块(36、38)固定在工作模块载体(18)上;多个工作模块(36、38),具有工作模块固定区域,以用于可松脱地固定在工作模块载体(18)的工作模块载体固定区域(24、26)上,其中,所述工作模块(36、38)中的至少一个工作模块包括可在至少一个运动模式中运动的工作载体(48、48')和用于驱动工作载体(48、48')以在所述至少一个运动模式中运动的工作载体驱动器。
技术研发人员:S·博尔姆,A·克莱
受保护的技术使用者:普瑞姆有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!