动作控制方法、装置、计算机及可读存储介质与流程
本发明涉及机床,具体涉及一种具有超声波加工功能机床的动作控制方法、装置、计算机及可读存储介质。
背景技术:
1、相较传统普通机床主轴而言,超声波主轴利用振动切削可实现刀具与工件切屑的断续接触,相应地,可减小切削热量。
2、现有的超声波主轴多是在主轴内设置相应的超声波模块,虽然此种设计能够满足超声波加工需求,但是给超声波主轴的设计增加了难度,同时也增加了装配复杂度,设计、装配及维修相对复杂。当然,现有超声波加工技术中,部分提供了外挂式超声波功能件,但结构相对固定,不能依据当前的作业状态如换刀等调整相应的结构,对主轴附近的空间环境要求相对严苛且固定的要求。
技术实现思路
1、本发明的主要目的在于提供一种动作控制方法、装置、计算机及可读存储介质,能够根据当前的作业状态控制相应的动作。
2、为实现上述目的,本发明提供如下技术方案:
3、第一方面,本发明提供一种动作控制方法,应用于具有动作执行组件的机床中,所述方法包括:
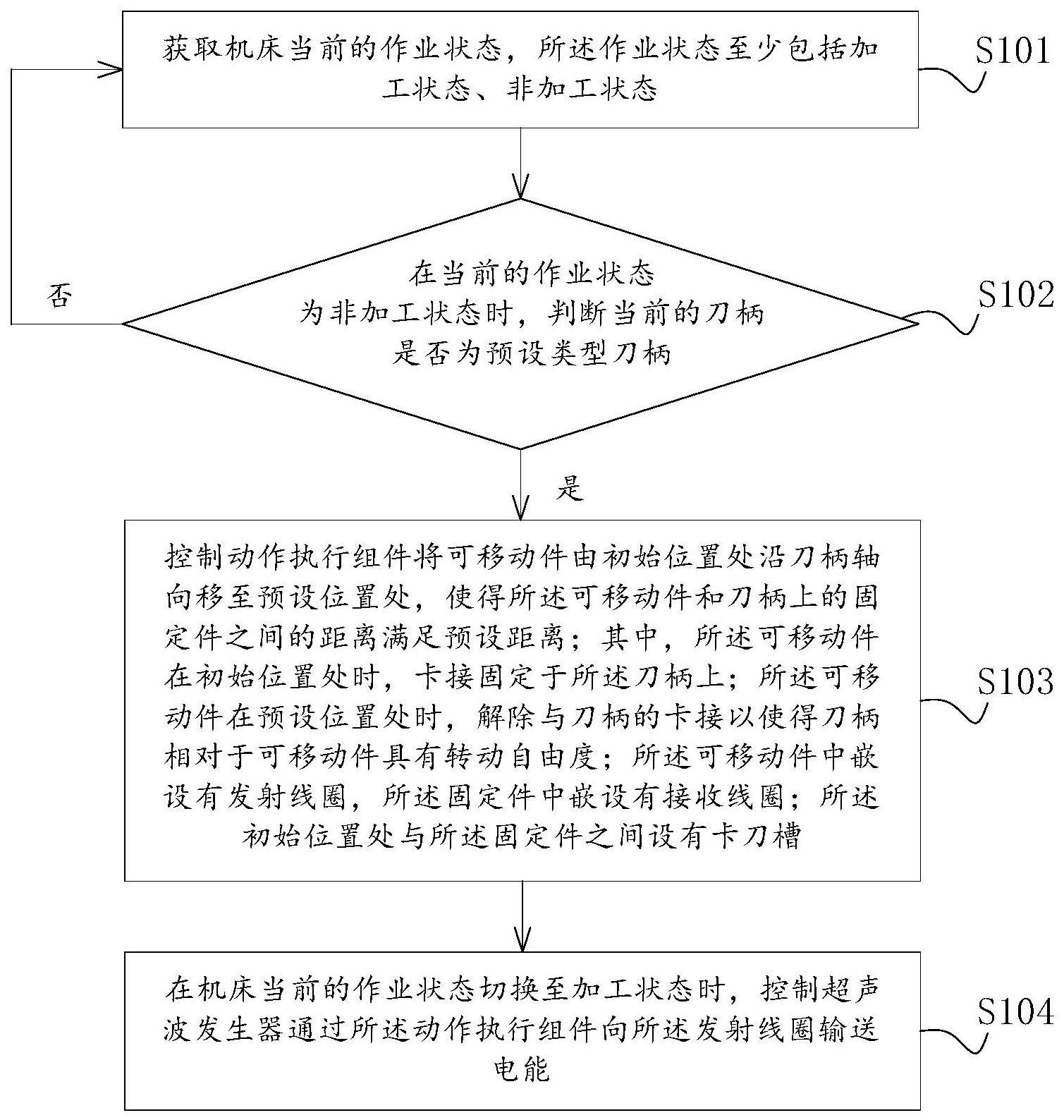
4、获取机床当前的作业状态,所述作业状态至少包括加工状态、非加工状态;
5、若当前的作业状态为非加工状态,则判断当前的刀柄是否为预设类型刀柄;
6、若是,则控制动作执行组件将可移动件由初始位置处沿刀柄轴向移至预设位置处,使得所述可移动件和刀柄上的固定件之间的距离满足预设距离;其中,所述可移动件在初始位置处时,卡接固定于所述刀柄上;所述可移动件在预设位置处时,解除与刀柄的卡接以使得刀柄相对于可移动件具有转动自由度;所述可移动件中嵌设有发射线圈,所述固定件中嵌设有接收线圈;所述初始位置处与所述固定件之间设有卡刀槽;;
7、若机床当前的作业状态切换至加工状态,则控制超声波发生器通过所述动作执行组件向所述发射线圈输送电能。
8、在所述动作控制方法的一实施方式中,所述判断当前的刀柄是否为预设类型刀柄包括:
9、通过识别刀柄上的图形码判断当前的刀柄是否为预设类型刀柄;和/或
10、通过识别刀柄的特征形状判断当前的刀柄是否为预设类型刀柄;和/或
11、通过获取刀柄的特征电信号判断当前的刀柄是否为预设类型刀柄。
12、在所述动作控制方法的一实施方式中,所述方法还包括:
13、若机床当前的作业状态由加工状态切换至非加工状态,则控制所述动作执行组件将所述可移动件由所述预设位置处轴向移至初始位置处并分离。
14、在所述动作控制方法的一实施方式中,所述动作执行组件安装在所述机床的主轴上;所述方法还包括:
15、若机床当前的作业状态由加工状态切换至非加工状态,则控制所述动作执行组件在与所述可移动件分离后,恢复至初始动作状态,所述初始动作状态包括所述动作执行组件的所有部分在刀柄轴向上的标高投影点均位于所述卡刀槽靠近主轴的一侧。
16、在所述动作控制方法的一实施方式中,在初始动作状态下,所述动作执行组件的所有部分在主轴轴向上的标高投影点均位于所述主轴上。
17、在所述动作控制方法的一实施方式中,在判断当前的刀柄是否为预设类型刀柄之前,所述方法还包括:
18、若接收到换刀信号,则通过预设方式判断换刀是否完成,所述预设方式包括通过侦测换刀臂的换刀完成动作;和/或,侦测主轴拉刀机构的拉刀完成动作。
19、在所述动作控制方法的一实施方式中,所述动作执行组件包括安装件及翻转件,所述安装件固定在主轴的上;所述翻转件相对所述安装件可翻转连接,所述翻转件通过翻转运动将刀柄上的可移动件由所述初始位置处在轴向移至所述预设位置处;或,
20、所述动作执行组件包括安装件及二级伸缩件,所述安装件固定在主轴上;所述二级伸缩件包括第一伸缩件和第二伸缩件,所述第一伸缩件与所述安装件连接,所述第一伸缩件具有可相对所述安装件伸缩的活动端;所述第二伸缩件设置在所述活动端上,所述第二伸缩件具有可相对所述活动端伸缩的作用末端,所述第一伸缩件的伸缩方向与所述第二伸缩件的伸缩方向具有夹角,所述作用末端用于作用于所述可移动件上,通过所述第一伸缩件与所述第二伸缩件的二级伸缩配合将刀柄上的可移动件由所述初始位置处在轴向移至所述预设位置处;或,
21、所述动作执行组件包括安装件及多自由度机械臂,所述安装件固定在主轴箱上;所述多自由度机械臂作用于所述可移动件上,通过多自由度机械臂的多自由度运动配合将刀柄上的可移动件由所述初始位置处在轴向移至所述预设位置处。
22、第二方面,本发明还提供一种动作控制装置,应用于具有动作执行组件的机床中,所述装置包括:
23、获取模块,用于获取机床当前的作业状态,所述作业状态至少包括加工状态、非加工状态;
24、判断模块,用于在当前的作业状态为非加工状态时,判断当前的刀柄是否为预设类型刀柄;
25、动作执行模块,用于在当前的刀柄为预设类型刀柄时,控制动作执行组件将可移动件由初始位置处沿刀柄轴向移至预设位置处,使得所述可移动件和刀柄上的固定件之间的距离满足预设距离;其中,所述可移动件在初始位置处时,卡接固定于所述刀柄上;所述可移动件在预设位置处时,解除与刀柄的卡接以使得刀柄相对于可移动件具有转动自由度;所述可移动件中嵌设有发射线圈,所述固定件中嵌设有接收线圈;所述初始位置处与所述固定件之间设有卡刀槽;
26、加工控制模块,用于在机床当前的作业状态切换至加工状态时,控制超声波发生器通过所述动作执行组件向所述发射线圈输送电能。
27、第三方面,本发明提供一种计算机,包括处理器,所述处理器用于执行存储器中存储的计算机程序时实现如上所述动作控制方法的步骤。
28、第四方面,本发明还一种可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现如上所述动作控制方法的步骤。
29、本发明的工作原理:
30、本发明提供的动作控制方法中,仅机床当前的作业状态为非加工状态时,才进行相关动作,即先判断当前的刀柄是否为预设类型刀柄,在满足预设类型刀柄时,再行控制动作执行组件进行相应动作,以支持实现超声波加工,不会干扰机床的正常作业。
31、与现有技术相比,本发明的有益效果是:
32、本发明能够根据机床当前的作业状态进行超声波加工控制,通用性好,可广泛适用于各类机床。
技术特征:
1.一种动作控制方法,应用于具有动作执行组件的机床中,其特征在于,所述方法包括:
2.如权利要求1所述的动作控制方法,其特征在于,所述判断当前的刀柄是否为预设类型刀柄包括:
3.如权利要求1所述的动作控制方法,其特征在于,所述方法还包括:
4.如权利要求3所述的动作控制方法,其特征在于,所述动作执行组件安装在所述机床的主轴上;所述方法还包括:
5.如权利要求4所述的动作控制方法,其特征在于,在初始动作状态下,所述动作执行组件的所有部分在主轴轴向上的标高投影点均位于所述主轴上。
6.如权利要求1所述的动作控制方法,其特征在于,在判断当前的刀柄是否为预设类型刀柄之前,所述方法还包括:
7.如权利要求1所述的动作控制方法,其特征在于,所述动作执行组件包括安装件及翻转件,所述安装件固定在主轴的上;所述翻转件相对所述安装件可翻转连接,所述翻转件通过翻转运动将刀柄上的可移动件由所述初始位置处在轴向移至所述预设位置处;或,
8.一种动作控制装置,应用于具有动作执行组件的机床中,其特征在于,所述装置包括:
9.一种计算机,其特征在于,包括处理器,所述处理器用于执行存储器中存储的计算机程序时实现如权利要求1至7中任一项所述动作控制方法的步骤。
10.一种可读存储介质,其上存储有计算机程序,其特征在于:所述计算机程序被处理器执行时实现如权利要求1至7中任一项所述动作控制方法的步骤。
技术总结
本发明公开一种动作控制方法、装置、计算机及可读存储介质,涉及机床技术领域,应用于具有动作执行组件的机床中,所述方法包括:获取机床当前的作业状态,所述作业状态至少包括加工状态、非加工状态;若当前的作业状态为非加工状态,则判断当前的刀柄是否为预设类型刀柄;若是,则利用动作执行组件将刀柄上的可移动件由初始位置处在轴向移至预设位置处,使得所述可移动件和刀柄上的固定件之间的距离满足预设距离;若机床当前的作业状态切换至加工状态,则控制超声波发生器通过所述动作执行组件向所述发射线圈输送电能。本发明提供的上述动作控制方法根据机床当前的作业状态进行超声波加工控制,通用性好。
技术研发人员:李青,张寒
受保护的技术使用者:深圳市创世纪机械有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!