一种新型焊接机器人的制作方法
1.本实用新型属于焊接机器人技术领域,具体涉及一种新型焊接机器人。
背景技术:
2.焊接机器人就是从事焊接的工业机器人,焊接机器人主要包括机器人和焊接设备两部分,机器人控制焊接设备移动位置,来对工件进行焊接作业,目前的焊接机器人会配合一个托料平台使用,托料平台上连接有夹具以进行工件的夹持固定,托料平台的顶部为一个裸露在工作环境中的平面,机器人控制焊接设备对工件进行焊接时产生的火花会直接向外飞溅,无法满足不同工件焊接过程中产生的飞溅火花的阻挡工作,会影响工作环境。
技术实现要素:
3.本实用新型提供了一种新型焊接机器人,具有使用效果强,使用的安全性高的特点。
4.本实用新型提供如下技术方案:包括焊接机器人主体和焊接机器人底座,所述焊接机器人主体固定连接在所述焊接机器人底座上表面,所述焊接机器人底座顶端固定连接有托料顶板,所述托料顶板内部滑动连接有两个一前一后对称分布的遮挡组件,所述遮挡组件包括弧形阻挡板、连接块和定位框,所述连接块滑动连接在所述托料顶板内部,所述弧形阻挡板滑动连接在所述连接块内部,所述弧形阻挡板内侧壁可拆卸连接有吸收板。
5.其中,所述连接块内部开设有弧形连接槽,所述弧形阻挡板滑动连接在所述弧形连接槽内部。
6.其中,所述弧形阻挡板底端固定连接有限位块,所述限位块卡合连接在所述弧形连接槽内部并用于阻止所述弧形阻挡板从所述连接块内部脱离。
7.其中,所述托料顶板内部开设有两个对应所述遮挡组件的安装槽,所述连接块位于对应所述安装槽内部,所述安装槽内部固定连接有两个用于连接对应所述连接块的连接横杆,所述连接块内部开设有两个对应所述连接横杆并用于连接两个所述连接横杆的连接孔。
8.其中,所述定位框固定连接所述弧形阻挡板内侧壁,所述吸收板卡合连接在所述定位框与所述弧形阻挡板内侧壁之间。
9.本实用新型的有益效果是:
10.1、本实用新型中,设置组合在一起的焊接机器人主体、焊接机器人底座和托料顶板,托料顶板的内部连接有两个一前一后对称分布的遮挡组件,通过两个连接横杆和连接块的配合使得遮挡组件整体能够在托料顶板上平稳的移动,操作的便利性高,便于操作人员进行遮挡组件整体于托料顶板上的位置调节工作,遮挡组件能够从托料顶板的上方将托料顶板遮挡住一部分,操作人员能够将遮挡组件调节到工件区域,遮挡组件和吸收板遮挡在工件的上方,能够起到焊接过程中阻挡并吸收向外飞溅的火花的作用,同时能够阻挡异物向焊接过程中的工件靠近,提高了装置的使用效果和使用的安全性。
11.2、本实用新型中,弧形阻挡板能够在弧形连接槽的内部移动,来改变处于托料顶板上方的弧形阻挡板遮挡区域的大小,以适应不同尺寸工件的正常焊接,通过改变遮挡组件整体的位置,使得装置能够灵活的适应不同工件和工件不同部位的焊接与焊接过程中的火花阻挡工作,两个遮挡组件能够单独进行于托料顶板上的位置调节工作,也能一起进行位置调节工作,装置使用的灵活性和适用性高,增强了装置的使用效果。
12.该装置中未涉及部分均与现有技术相同或可采用现有技术加以实现。
附图说明
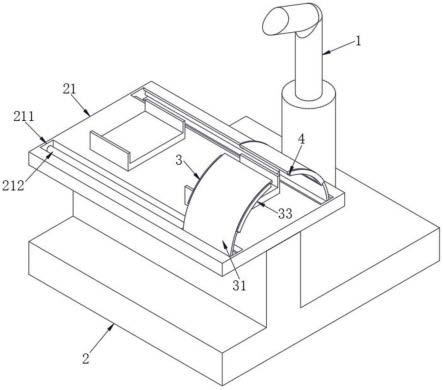
13.图1为本实用新型的立体结构示意图;
14.图2为本实用新型的右视结构示意图;
15.图3为本实用新型右视的剖面结构示意图;
16.图4为本实用新型中遮挡组件和吸收板的结构示意图。
17.图中:1、焊接机器人主体;2、焊接机器人底座;21、托料顶板;211、安装槽;212、连接横杆;3、遮挡组件;31、弧形阻挡板;311、限位块;32、连接块;321、弧形连接槽;322、连接孔;33、定位框;4、吸收板。
具体实施方式
18.请参阅图1-图4,本实用新型提供以下技术方案:包括焊接机器人主体1和焊接机器人底座2,焊接机器人主体1固定连接在焊接机器人底座2上表面,焊接机器人底座2顶端固定连接有托料顶板21,托料顶板21内部滑动连接有两个一前一后对称分布的遮挡组件3,遮挡组件3包括弧形阻挡板31、连接块32和定位框33,连接块32滑动连接在托料顶板21内部,弧形阻挡板31滑动连接在连接块32内部,弧形阻挡板31内侧壁可拆卸连接有吸收板4。
19.本实施方案中:焊接机器人底座2置于地面上,焊接机器人主体1通过螺钉固定在焊接机器人底座2的上表面,焊接机器人主体1与焊接机器人底座2连接的牢固性高,能够提高焊接机器人主体1使用时的稳定性,焊接机器人底座2的顶端固定连接有托料顶板21,托料顶板21的顶部能够安装用来固定待焊工件的夹具,能够提高焊接机器人主体1对待焊工件的焊接效果。
20.托料顶板21的内部滑动连接有两个一前一后对称分布的遮挡组件3,遮挡组件3由弧形阻挡板31、连接块32和定位框33组成,连接块32内部开设有弧形连接槽321,弧形阻挡板31滑动连接在弧形连接槽321内部,定位框33固定连接弧形阻挡板31内侧壁,实现了弧形阻挡板31、连接块32和定位框33的连接组合,托料顶板21的内部开设有两个对应遮挡组件3的安装槽211,连接块32位于对应的安装槽211内部,安装槽211的内部固定连接有两个连接横杆212,连接块32的内部开设有两个对应连接横杆212的连接孔322,两个连接横杆212分别位于两个连接孔322的内部,使得连接块32能够在对应安装槽211的内部平稳的移动,来改变弧形阻挡板31在托料顶板21上方的位置,操作的便利性高,便于操作人员进行遮挡组件3整体于托料顶板21上的位置调节工作,遮挡组件3进行位置调节过程中的稳定性高。
21.弧形阻挡板31遮挡在待焊工件的上方,弧形阻挡板31能够起到阻挡向外飞溅的火花作用,避免火花直接向四周飞溅而影响工作环境,能够起到焊接过程中阻挡向外飞溅的火花的作用,同时能够阻挡异物向焊接过程中的工件靠近,提高了装置的使用效果和使用
的安全性,弧形阻挡板31能够在弧形连接槽321的内部移动,来改变弧形阻挡板31在连接块32内部的位置,从而改变处于托料顶板21上方的弧形阻挡板31遮挡区域的大小,以确保不同尺寸工件的正常焊接,弧形连接槽321能够起到引导弧形阻挡板31移动的作用,能够提高弧形阻挡板31在连接块32内部移动时的稳定性,通过改变遮挡组件3整体的位置,使得装置能够灵活的适应不同工件和工件不同部位的焊接与焊接过程中的火花阻挡工作,两个遮挡组件3能够单独进行于托料顶板21上的位置调节工作,也能一起进行位置调节工作,两个弧形阻挡板31能够单独进行于连接块32内部的位置调节工作,也能一起进行位置调节工作,装置使用的灵活性和适用性高,增强了装置的使用效果。
22.弧形阻挡板31的底端固定连接有限位块311,限位块311卡合连接在弧形连接槽321内部,限位块311能够起到阻止弧形阻挡板31从连接块32内部脱离的作用,使弧形阻挡板31能够稳定的在连接块32的内部进行位置调节工作。
23.定位框33与弧形阻挡板31的内侧壁之间卡合连接有吸收板4,便于操作人员进行吸收板4的安装拆卸工作,操作的便利性高,吸收板4能够起到吸收飞溅的火花的作用,从而能够增强装置对工作环境和操作人员的保护效果。
24.本实用新型的工作原理及使用流程:在使用时,操作人员将待焊工件固定在托料顶板21上的夹具内,推动弧形阻挡板31使连接块32在两个连接横杆212的外侧移动,来改变弧形阻挡板31在托料顶板21上的位置,将弧形阻挡板31移动到待焊工件的区域后,拉动弧形阻挡板31使弧形阻挡板31在连接块32的内部移动,来改变弧形阻挡板31于托料顶板21上方的遮挡区域大小,弧形阻挡板31的位置调节工作完成后,焊接机器人主体1工作来进行工件的焊接工作。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1