一种伺服电机零部件智能压装设备的制作方法
1.本实用新型属于伺服电机加工技术领域,具体涉及一种伺服电机零部件智能压装设备。
背景技术:
2.伺服电机零部件是构成伺服电机不可缺少的配件,将零部件组合在一起,才能完成一个伺服电机的制作,因此,在伺服电机加工过程中,通常需要对伺服电机的零部件压装在伺服电机的另一零部件上,使得伺服电机能够压装成一个完整的伺服电机。
3.目前,针对伺服电机零部件的压装,一般都是通过人工操作来完成的,将伺服电机的零部件对准所需要压装的位置放置,然后再用锤头将伺服电机的零部件压装在所需要的位置;而在压装的过程中,又需要对电机的位置进行固定,以保证在压装过程中不会发生偏移。现今,针对不同的伺服电机零部件,一般都会设计不同型号和规格的压装辅助工具来操作;但是该压装方式需要使用人力操作,存在一定的弊端,在操作过程中无法精准定位,压装的时候很容易伤到手,过程中需要人工转移物料,使用起来不是很方便。
4.因此,针对上述设备无法精准定位的问题,亟需得到解决,以改善设备的使用场景。
技术实现要素:
5.(1)要解决的技术问题
6.针对现有技术的不足,本实用新型的目的在于提供一种伺服电机零部件智能压装设备,该设备旨在解决现有技术下需要使用人力操作,压装的时候很容易伤到手,过程中需要人工转移物料,使用起来不是很方便的技术问题。
7.(2)技术方案
8.为了解决上述技术问题,本实用新型提供了一种伺服电机零部件智能压装设备,该设备包括压装台、设置于所述压装台内侧用于翻转伺服电机零部件的翻转驱动模块、设置于所述翻转驱动模块上侧用于固定伺服电机零部件的工装夹持模块;其中,所述压装台外侧设有用于转运伺服电机零部件的智能转运机器人,所述翻转驱动模块上侧设有用于推动所述工装夹持模块向外移动的调节驱动电机,所述压装台下侧设有用于支撑所述压装台的支撑脚,所述压装台外侧设有电控箱,所述压装台上侧设有向外延伸的延伸板,所述延伸板和所述压装台上侧设有支撑架,所述支撑架上侧设有用于防尘的防尘板,所述防尘板下侧设有用于压装伺服电机零部件的冲压机,所述防尘板上侧设有用于连接所述冲压机的液压缸,所述防尘板外侧设有用于连接所述支撑架的连接块。
9.使用本技术方案的设备时,先将翻转驱动模块上侧的调节驱动电机打开,使得调节驱动电机能够将工装夹持模块向外推,从而将工装夹持模块移出翻转驱动模块,然后再打开翻转驱动模块,使得翻转驱动模块能够带动工装夹持模块呈一定角度倾斜,然后再将智能转运机器人打开,使得智能转运机器人能够将物料放入工装夹持模块中,然后再打开
翻转驱动模块,将翻转驱动模块恢复至原位,然后再将需要压装的零部件放置在以放置好的物料上,放好之后,再打开工装夹持模块将伺服电机的零部件固定住,固定好之后,再重新打开调节驱动电机,将工装夹持模块移回至翻转驱动模块上,然后再将防尘板上下两侧的液压缸和冲压机打开,使得冲压机能够将伺服电机零部件压装在其下侧的物料上,以实现自动化的智能压装处理;通过调节驱动电机的设置,可以将工装夹持模块移出翻转驱动模块,再通过智能转运机器人可以代替人工操作,将伺服电机零部件精准地放置在需要压装的位置,通过工装夹持模块的设置,可以对伺服电机零部件的位置进行固定,避免在冲压机压装的过程中发生偏移,整个过程无需人工转移物料,也无需人工配合固定伺服电机零部件的位置,使用起来十分方便。
10.优选地,所述翻转驱动模块包括翻转驱动电机,所述翻转驱动电机的输出轴设有用于转动的主动转轴,所述主动转轴内侧设有第一支撑块。通过翻转驱动电机的设置,使得翻转驱动电机转动带动主动转轴转动,从而带动第一支撑块跟随驱动电机一起转动。
11.进一步的,所述压装台另一侧设有与所述主动转轴相对应的从动转轴,所述从动转轴内侧设有与所述第一支撑块相对应的第二支撑块。从动转轴的位置与主动转轴的位置相互对应,第二支撑块的位置与第一支撑块相互对应,使得主动转轴与从动转轴能够保持在同一水平线上转动。
12.更进一步的,所述第二支撑块内侧设有用于连接所述第一支撑块的支撑台,所述支撑台表面开设有用于限制所述工装夹持模块的限位槽,所述调节驱动电机固定安装在所述支撑台上侧。通过限位槽的设置,可以对工装夹持模块的移动位置进行固定,避免工装夹持模块在移动过程中偏离支撑台,以保证工装夹持模块能够平稳地移动。
13.更进一步的,所述支撑台上侧设有用于固定所述调节驱动电机的第一固定块,所述支撑台外侧设有用于固定所述工装夹持模块的第二固定块,所述第二固定块与所述第一固定块内侧设有用于连接所述调节驱动电机的螺杆。通过螺杆的设置,使得调节驱动电机转动带动螺杆转动,从而带动工装夹持模块在螺杆上水平移动。
14.更进一步的,所述工装夹持模块包括零部件放置台,所述零部件放置台外侧设有用于连接所述螺杆的滑块,所述滑块表面开设有与所述螺杆相对应的螺纹槽,所述螺杆与所述滑块之间为螺纹连接。通过滑块的设置,使得螺杆在转动过程中,能够带动滑块水平移动,使得滑块能够带动零部件放置台水平移动。
15.更进一步的,所述零部件放置台下侧设有与所述限位槽相对应的限位块,所述零部件放置台另一侧设有用于支撑所述零部件放置台的第三支撑块,所述零部件放置台上侧开设有用于放置伺服电机零部件的零部件放置槽,所述零部件放置槽内侧设有用于缓冲上部作用力的缓冲圈。通过缓冲圈的设置,可以避免零部件在放置过程中与零部件放置台直接接触,从而缓冲在零部件放置过程中传来的作用力。
16.更进一步的,所述零部件放置槽左右两侧设有用于夹持伺服电机零部件的第一夹持板,所述第一夹持板外侧设有用于调节所述第一夹持板移动的第一调节气缸,所述零部件放置槽前后两侧设有第二夹持板,所述第二夹持板外侧设有第二调节气缸。通过第一调节气缸和第二调节气缸的设置,可以对第一夹持板和第二夹持板的位置进行调节,从而对不同型号和规格的伺服电机零部件进行夹紧固定,适用性更强。
17.更进一步的,所述智能转运机器人包括机器人底座,所述机器人底座下侧设有用
于固定所述机器人底座的底座固定板,所述机器人底座外侧设有用于检修的检修盖,所述机器人底座上侧设有用于全方位转动的转动座,所述转动座上侧设有第一机械臂,所述转动座外侧设有用于驱动所述第一机械臂转动的第一翻转电机。通过检修盖的设置,可以方便在智能运转机器人损坏的情况下对其进行检修,以保证其能够正常使用。
18.更进一步的,所述第一机械臂上侧设有第二机械臂,所述第一机械臂上侧设有用于固定所述第二机械臂的机械臂固定座,所述机械臂固定座外侧设有用于驱动所述机械臂固定座转动的第二翻转电机,所述机械臂固定座右侧设有用于驱动所述第二机械臂的第三翻转电机,所述第二机械臂端部设有用于夹持零部件的机械爪,所述机械爪右侧设有用于连接所述第二机械臂的连接座。通过第一翻转电机、第二翻转电机和第三翻转电机的设置,可以对第一机械臂和第二机械臂的位置进行调整,从而更加精准地放置零部件。
19.(3)有益效果
20.与现有技术相比,本实用新型的有益效果在于:本实用新型的设备通过调节驱动电机的设置,可以将工装夹持模块移出翻转驱动模块,再通过智能转运机器人可以代替人工操作,将伺服电机零部件精准地放置在需要压装的位置,通过工装夹持模块的设置,可以对伺服电机零部件的位置进行固定,避免在冲压机压装的过程中发生偏移,整个过程无需人工转移物料,也无需人工配合固定伺服电机零部件的位置,使用起来十分方便。
附图说明
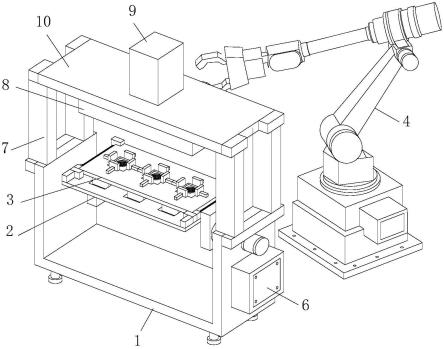
21.图1为本实用新型设备一种具体实施方式的结构示意图;
22.图2为本实用新型设备一种具体实施方式中压装台的结构示意图;
23.图3为本实用新型设备一种具体实施方式中翻转驱动模块的结构示意图;
24.图4为本实用新型设备一种具体实施方式中工装夹持模块的结构示意图;
25.图5为本实用新型设备一种具体实施方式中智能转运机器人的结构示意图。
26.附图中的标记为:1、压装台;2、翻转驱动模块;201、翻转驱动电机;202、主动转轴;203、第一支撑块;204、从动转轴;205、第二支撑块;206、支撑台;207、限位槽;208、第一固定块;209、调节驱动电机;210、第二固定块;211、螺杆;3、工装夹持模块;301、零部件放置台;302、限位块;303、滑块;304、第三支撑块;305、零部件放置槽;306、缓冲圈;307、第一夹持板;308、第一调节气缸;309、第二调节气缸;310、第二夹持板;4、智能转运机器人;401、机器人底座;402、底座固定板;403、检修盖;404、转动座;405、第一机械臂;406、第一翻转电机;407、机械臂固定座;408、第二翻转电机;409、第三翻转电机;410、第二机械臂;411、连接座;412、机械爪;5、支撑脚;6、电控箱;7、支撑架;8、防尘板;9、液压缸;10、冲压机;11、连接块;12、延伸板。
具体实施方式
27.本具体实施方式是一种伺服电机零部件智能压装设备,其结构示意图如图1所示,其压装台的结构示意图图如图2所示,该设备包括压装台1、设置于压装台1内侧用于翻转伺服电机零部件的翻转驱动模块2、设置于翻转驱动模块2上侧用于固定伺服电机零部件的工装夹持模块3;压装台1外侧设有用于转运伺服电机零部件的智能转运机器人4,翻转驱动模块2上侧设有用于推动工装夹持模块3向外移动的调节驱动电机209,压装台1下侧设有用于
支撑压装台1的支撑脚5,压装台1外侧设有电控箱6,压装台1上侧设有向外延伸的延伸板12,延伸板12和压装台1上侧设有支撑架7,支撑架7上侧设有用于防尘的防尘板8,防尘板8下侧设有用于压装伺服电机零部件的冲压机10,防尘板8上侧设有用于连接冲压机10的液压缸9,防尘板8外侧设有用于连接支撑架7的连接块11。
28.针对本具体实施方式,冲压机10的型号和规格可以根据需要进行设定。
29.其中,翻转驱动模块2包括翻转驱动电机201,翻转驱动电机201的输出轴设有用于转动的主动转轴202,主动转轴202内侧设有第一支撑块203,压装台1另一侧设有与主动转轴202相对应的从动转轴204,从动转轴204内侧设有与第一支撑块203相对应的第二支撑块205,第二支撑块205内侧设有用于连接第一支撑块203的支撑台206,支撑台206表面开设有用于限制工装夹持模块3的限位槽207,调节驱动电机209固定安装在支撑台206上侧,支撑台206上侧设有用于固定调节驱动电机209的第一固定块208,支撑台206外侧设有用于固定工装夹持模块3的第二固定块210,第二固定块210与第一固定块208内侧设有用于连接调节驱动电机209的螺杆211,工装夹持模块3包括零部件放置台301,零部件放置台301外侧设有用于连接螺杆211的滑块303,滑块303表面开设有与螺杆211相对应的螺纹槽,螺杆211与滑块303之间为螺纹连接,零部件放置台301下侧设有与限位槽207相对应的限位块302,零部件放置台301另一侧设有用于支撑零部件放置台301的第三支撑块304,零部件放置台301上侧开设有用于放置伺服电机零部件的零部件放置槽305,零部件放置槽305内侧设有用于缓冲上部作用力的缓冲圈306,零部件放置槽305左右两侧设有用于夹持伺服电机零部件的第一夹持板307,第一夹持板307外侧设有用于调节第一夹持板307移动的第一调节气缸308,零部件放置槽305前后两侧设有第二夹持板310,第二夹持板310外侧设有第二调节气缸309。
30.此外,智能转运机器人4包括机器人底座401,机器人底座401下侧设有用于固定机器人底座401的底座固定板402,机器人底座401外侧设有用于检修的检修盖403,机器人底座401上侧设有用于全方位转动的转动座404,转动座404上侧设有第一机械臂405,转动座404外侧设有用于驱动第一机械臂405转动的第一翻转电机406,第一机械臂405上侧设有第二机械臂410,第一机械臂405上侧设有用于固定第二机械臂410的机械臂固定座407,机械臂固定座407外侧设有用于驱动机械臂固定座407转动的第二翻转电机408,机械臂固定座407右侧设有用于驱动第二机械臂410的第三翻转电机409,第二机械臂410端部设有用于夹持零部件的机械爪412,机械爪412右侧设有用于连接第二机械臂410的连接座411。零部件放置槽305设置有三组,也可以设置两组或四组,可以根据需要进行设定。
31.该设备其翻转驱动模块的结构示意图如图3所示,其工装夹持模块的结构示意图如图4所示,其智能转运机器人的结构示意图如图5所示。
32.在此还需要特别说明的是,限位块302可以设置三个,也可以设置两个或一个,可以根据需要进行设定。
33.使用本技术方案的设备时,先将翻转驱动模块2上侧的调节驱动电机209打开,使得调节驱动电机209能够将工装夹持模块3向外推,从而将工装夹持模块3移出翻转驱动模块2,然后再打开翻转驱动模块2,使得翻转驱动模块2能够带动工装夹持模块3呈一定角度倾斜,然后再将智能转运机器人4打开,使得智能转运机器人4能够将物料放入工装夹持模块3中,然后再打开翻转驱动模块2,将翻转驱动模块2恢复至原位,然后再将需要压装的零
部件放置在以放置好的物料上,放好之后,再打开工装夹持模块3将伺服电机的零部件固定住,固定好之后,再重新打开调节驱动电机209,将工装夹持模块3移回至翻转驱动模块2上,然后再将防尘板8上下两侧的液压缸9和冲压机10打开,使得冲压机10能够将伺服电机零部件压装在其下侧的物料上,以实现自动化的智能压装处理。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1