一种举升机的双支臂焊接工装的制作方法
1.本技术涉及焊接加工领域,尤其是涉及一种举升机的双支臂焊接工装。
背景技术:
2.现有技术中,参照图1,举升机的双支臂1包括支撑管11,支撑管11对应自身中间位置处固定连接有穿线板13,支撑管11靠近两端边缘位置处均固定连接有两片对应的支撑板14,支撑管11对应的两片支撑板14之间位置处固定连接有两个支撑架12,每个支撑架12开口均朝向远离支撑管11方向,每个支撑板14靠近自身中间位置均开设有连接轴孔141,对应两个支撑板14对应连接轴孔141位置处共同插接有连接轴15,支撑板14远离支撑管11位置处设有液压轴孔142,对应两个支撑板14对应液压轴孔142位置处共同固定连接有液压轴16,靠近穿线板13的两片支撑板14相互远离两侧均固定连接有多个信号管17,信号管17用于归置液压装置的信号线。现有的焊接工装每个部件之间多采用单独的夹持固定工具,通过将各部件分别固定于对应位置后分别进行焊接。
3.当需要使用时,将支撑管11水平放置,在支撑管11上测量出穿线板13对应位置,操作夹具使穿线板13抵接于支撑管11,进行焊接;随后在支撑管11上测量出每个支撑板14对应的位置,分别操作夹具使每片支撑板14一端抵接于支撑管11,进行焊接;将每根连接轴15分别穿过对应连接轴孔141,将每根液压轴16分别穿过液压轴孔142,对连接轴15与液压轴16分别进行焊接;在需要设置信号管17的支撑板14一侧量出每个信号管17位置,用夹具夹持信号管17,进行焊接。
4.针对上述中的相关技术,发明人认为现有技术虽然能够基本完成焊接任务,但在焊接过程中存在各部件配合关系和相对位置关系无法保证,焊接加工中加工精度过低,并由此导致加工废品率偏高,产品性能得不到保证的问题。
技术实现要素:
5.为了保障焊接过程中举升机的双支臂各部件配合关系相对稳定,提高焊接加工的精度,本技术提供一种举升机的上支臂焊接工装。
6.本技术提供的一种举升机的双支臂焊接工装采用如下的技术方案:
7.一种举升机的双支臂焊接工装,包括两片安装板,两个安装板之间固定连接有上连接板和下连接板,上连接板和下连接板分别固定连接于安装板沿长度方向靠近自身两端位置处,上连接板沿自身长度方向对应自身中间位置处固定连接有定位杆,定位杆固定连接于上连接板远离下连接板位置处,每个安装板均设置为用于对支撑管和支撑架进行定位的上定位部和用于对支撑板、连接轴、液压轴和信号管进行定位的下定位部。
8.通过采用上述技术方案,用户使用时,将支撑管和支撑架放置于焊接工装上定位部对应位置,将支撑板和信号管放置于下定位部对应位置,将连接轴穿过支撑板上的连接轴孔,将液压轴穿过支撑板上的液压轴孔,操作焊接工装将各部件位置进行固定,使用焊枪对支撑管和支撑架之间、支撑板和支撑管之间、液压轴和支撑板之间和信号管和支撑板之
间进行焊接,保障焊接过程中各部件位置关系相对稳定,保障焊接精度。
9.可选的,所述上定位部包括定位架,定位架固定连接于安装板靠近定位杆位置处,每个安装板远离定位架位置处均固定连接有竖直推拉式夹钳,竖直推拉式夹钳设置于定位架靠近下定位部一侧,竖直推拉式夹钳压头朝向定位架,竖直推拉式夹钳用于将支撑管压紧固定。
10.通过采用上述技术方案,用户使用时,将支撑管对称放置在焊接工装两个安装板上,并使支撑管和定位架抵接,拉动竖直推拉式夹钳,使竖直推拉式夹钳的压头抵接于支撑管侧面并将支撑管压紧在定位架上,从而起到固定支撑管的作用,避免支撑管在焊接过程中发生移动,减少焊接过程的误差。
11.可选的,所述上定位部还包括两个第一定位块,支撑管能够放置于定位架与第一定位块之间,每个第一定位块均开设有第一定位孔,第一定位孔的轴向沿安装板宽度方向设置,两个相对应第一定位块对应第一定位孔内共同插接有用于对支撑架进行定位的固定杆。
12.通过采用上述技术方案,用户使用时,将两个支撑架放置于两个第一定位块之间,让两个支撑架开口均朝向下定位部,并让两个支撑架分别抵接于两个第一定位块,使用固定杆穿过两个第一定位孔,将两个支撑架挤压,使其和支撑管侧壁抵接固定,防止焊接过程中发生移动,同时固定方式简单,便于对支撑架和支撑管之间进行焊接。
13.可选的,所述下定位部包括两个第二定位块,两个第二定位块分别设置于两个第一定位块相互远离方向的两侧,第二定位块位于第一定位块远离定位架一侧,第二定位块能够抵接于支撑板。
14.通过采用上述技术方案,用户使用时,将两个支撑板分别放置在两个第二定位块相互远离方向两侧,并使两个支撑板分别抵接于两个第二定位块,便于对支撑板进行后续的焊接加工,简化限位操作的流程。
15.可选的,每个所述安装板对应每个第二定位块位置处均固定连接有水平推拉式夹钳,两个水平推拉式夹钳压头朝向相反方向,两个水平推拉式夹钳压头分别朝向两个第二定位块,水平推拉式夹钳的压头能够抵接于支撑板。
16.通过采用上述技术方案,用户使用时,将两个支撑板分别放置于同一安装板的两个第二定位块位置处,两个支撑板分别抵接于第二定位块相互靠近方向一侧,推动水平推拉式夹钳使支撑板压紧于第二定位块,从而起到固定支撑板的作用,保障了焊接过程中支撑板位置关系的稳定,减少焊接过程中误差的产生。
17.可选的,每个所述安装板对应每个第二定位块位置处均固定连接有第三定位块,第三定位块位于第二定位块远离第一定位块一侧,每个第三定位块对应自身均开设有第二定位孔,第二定位孔的轴向沿安装板宽度方向设置,连接轴能够穿过第二定位孔。
18.通过采用上述技术方案,用户使用时,将连接轴穿过同一安装板上的两个第二定位块、连接轴套和两个连接轴孔,推动连接轴套使其抵接于远离定位杆一侧的支撑板,操作焊枪对连接轴套与支撑板抵接位置进行焊接,保障了焊接加工过程中连接轴孔与连接轴套的同轴度,提高了加工精度。
19.可选的,每个所述安装板对应每个第三定位块位置处均固定连接有第四定位块,第四定位块位于第三定位块远离第二定位块一侧,每个第四定位块均开设有第三定位孔,
第三定位孔的轴向沿安装板宽度方向设置,液压轴能够穿过第三定位孔。
20.通过采用上述技术方案,用户使用时,将液压轴穿过同一个安装板上的两个第三定位孔和两个液压轴孔,并使液压轴关于安装板两端对称放置,操作焊枪对液压轴孔与液压轴接触面进行焊接,保证了液压轴与支撑板之间的位置关系,减少了焊接加工造成的误差。
21.可选的,每个所述安装板靠近第二定位块位置处均固定连接有两个固定架,固定架固定连接于安装板靠近定位杆位置处,同一安装板上两个固定架沿安装板长度方向阵列设置,每个固定架一侧均固定连接有定位轴,定位轴用于固定和限位信号管。
22.通过采用上述技术方案,用户使用时,将信号管套接于定位轴,并使信号管表面抵接于支撑板表面,操作焊枪对信号管与支撑板抵接位置处进行焊接,简化了焊接过程,使信号管的定位焊接易于操作,降低了工作难度。
23.可选的,每个所述安装板对应第三定位块位置处均固定连接有紧固推拉式夹钳,两个紧固推拉式夹钳的压头朝向相反方向,且紧固推拉式夹钳的压头能够抵接于支撑板,安装板同侧的水平推拉式夹钳与紧固推拉式夹钳沿安装板长度方向阵列设置。
24.通过采用上述技术方案,用户使用时,推动紧固推拉式夹钳,使紧固推拉式夹钳压头抵接于支撑板并将支撑板压紧,此时在水平推拉式夹钳与紧固推拉式夹钳共同作用下,支撑板被严密压紧于同一安装板上的第二定位块、第三定位块和第四定位块相互靠近方向一侧,使支撑板的固定更加稳定,进一步提高了加工精度。
25.综上所述,本技术包括以下至少一种有益技术效果:
26.1.第一定位块、第一定位孔、定位架和固定杆的设计,使支撑管和支撑架之间配合关系稳定,降低支撑管和支撑架之间进行焊接的难度,提高支撑管与支撑架之间焊接加工精度;
27.2.第二定位块、第三定位块、第四定位块、第二定位孔和第三定位孔的设计,保障了连接轴同支撑板、液压轴同支撑板之间的配套关系,保障了连接轴与液压轴和支撑板上对应连接轴孔与液压轴孔之间的同轴度,避免了焊接加工中工件滑动导致的加工精度低的问题;
28.3.固定架和定位轴的设计,降低了信号管焊接加工的难度,不再需要用传统的手持等方式进行加工,简化了加工流程,降低了加工难度。
附图说明
29.图1是本技术实施例的举升机的双支臂的构造示意图;
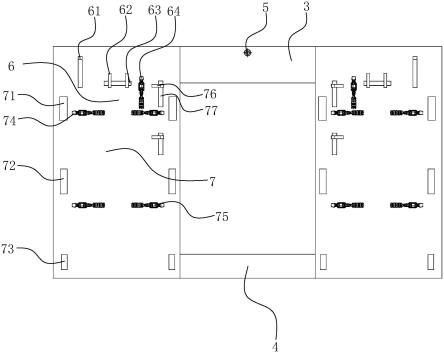
30.图2是本技术实施例的焊接工装构造示意图;
31.图3使本技术实施例的第二定位孔构造示意图。
32.附图标记说明:1、举升机的双支臂;11、支撑管;12、支撑架;13、穿线板;14、支撑板;141、连接轴孔;142、液压轴孔;15、连接轴;151、连接轴套;16、液压轴;17、信号管;2、安装板;3、上连接板;4、下连接板;5、定位杆;6、上定位部;61、定位架;62、第一定位块;621、第一定位孔;63、固定杆;64、竖直推拉式夹钳;7、下定位部;71、第二定位块;72、第三定位块;721、第二定位孔;73、第四定位块;731、第三定位孔;74、水平推拉式夹钳;75、紧固推拉式夹钳;76、固定架;77、定位轴。
具体实施方式
33.以下结合附图2-3对本技术作进一步详细说明。
34.本技术实施例公开一种举升机的双支臂焊接工装。
35.参照图2,一种举升机的双支臂焊接工装包括两个安装板2,两个安装板2之间共同固定连接有上连接板3和下连接板4,上连接板3和下连接板4分别固定连接于安装板2长度方向靠近自身两端位置处;上连接板3顶部远离下连接板4位置处固定连接有定位杆5,定位杆5固定连接于上连接板3对应自身中间位置处,穿线板13能够插接于定位杆5;每个安装板2均设置为上定位部6与下定位部7,上定位部6用于对支撑管11和支撑架12进行固定和限位;下定位部7用于对支撑板14、连接轴15、液压轴16和信号管17进行固定和限位。
36.用户使用时,将支撑管11和支撑架12通过上定位部6固定于安装板2的对应位置,将支撑板14和信号管17通过下定位部7固定于安装板2的对应位置,调节各部件配合关系后进行焊接,能够避免分散焊接造成的零部件配合关系混乱的情况,提高焊接加工精度,保障加工成品率。
37.参照图2和图3,上定位部6包括定位架61,定位架61固定连接于安装板2远离下定位部7位置处,定位架61固定连接于安装板2远离定位杆5位置处,每个安装板2顶部均沿自身宽度方向对应自身中间位置处固定连接有两个第一定位块62,第一定位块62固定连接于安装板2远离下定位部7位置处,定位架61与第一定位块62之间能够放置支撑管11;每个第一定位块62对应自身中间位置处均开设有第一定位孔621,所有第一定位孔621的轴向均沿安装板2宽度方向设置,同一安装板2的两个第一定位块62对应第一定位孔621内共同插接有固定杆63,每个安装板2靠近上连接板3位置处均固定连接有竖直推拉式夹钳64,两个竖直推拉式夹钳64分别固定连接于两个安装板2相互靠近位置处,竖直推拉式夹钳64的压头沿安装板2长度方向设置,且压头朝向定位架61,竖直推拉式夹钳64的压头能够抵接于支撑管11。
38.用户使用时,将支撑管11放入定位架61与第一定位块62之间,操作竖直推拉式夹钳64,使竖直推拉式夹钳64的压头抵接于支撑管11侧面,从而使支撑管11压紧于定位架61靠近竖直推拉式夹钳64一侧,防止支撑管11发生移动;将两个支撑架12分别放置于同一安装板2的两个第一定位块62相互靠近一侧,使用固定杆63穿过第一定位孔621将两个支撑架12卡紧,使其抵接于支撑管11,操作焊枪完成焊接,能够保障支撑架12与支撑管11配合关系相对稳定,减少焊接加工中出现的误差。
39.参照图2和图3,下定位部7包括两个第二定位块71,两个第二定位块71分别固定连接于安装板2顶部对应自身宽度方向靠近两侧位置处,第二定位块71固定连接于安装板2靠近边缘位置处,第二定位块71固定连接于安装板2靠近支撑管11位置处,第二定位块71固定连接于第一定位块62远离定位架61一侧,安装板2顶部对应自身宽度方向靠近两侧位置处分别固定连接有第三定位块72,两个第三定位块72固定连接于安装板2靠近边缘位置处,两个第三定位块72均固定连接于安装板2对应连接轴15位置处,第三定位块72位于第二定位块71远离第一定位块62一侧,每个第三定位块72对应自身中间位置处均开设有第二定位孔721,所有第二定位孔721的轴向均沿安装板2宽度方向设置;每个安装板2顶部沿自身长度方向远离定位杆5位置处均固定连接有两个第四定位块73,两个第四定位块73分别固定连接于安装板2沿宽度方向靠近两侧位置处,两个第四定位块73均固定连接于安装板2靠近边
缘位置处,每个第四定位块73对应自身中间位置处均开设有第三定位孔731,所有第三定位孔731的轴向均沿安装板2宽度方向设置;同一安装板2上的第二定位块71、第三定位块72和第四定位块73沿安装板2长度方向阵列设置。
40.参照图2和图3,每个安装板2沿自身宽度方向靠近定位杆5位置处均固定连接有固定架76,固定架76沿安装板2长度方向阵列设置,每个固定架76均固定连接有定位轴77,定位轴77固定连接于固定架76对应信号管17位置处,信号管17能够套接于定位轴77,安装板2的两个第二定位块71之间固定连接有两个水平推拉式夹钳74,水平推拉式夹钳74压头朝向第二定位块71方向,两个水平推拉式夹钳74压头朝向相反方向,水平推拉式夹钳74能够与第二定位块71共同夹紧支撑板14;安装板2靠近两侧均固定连接有紧固推拉式夹钳75,两个紧固推拉式夹钳75均固定连接于安装板2对应第三定位块72与第四定位块73之间靠近第三定位块72位置处,两个紧固推拉式夹钳75压头沿安装板2宽度方向设置,同一安装板2上的紧固推拉式夹钳75与水平推拉式夹钳74沿安装板2长度方向阵列设置。
41.用户使用时,将两块支撑板14放置于焊接工装一侧安装板2,使两块支撑板14分别抵接于安装板2两侧的第二定位块71,调整支撑板14使支撑板14上开设的连接轴15孔与第二定位孔721对齐,拉动水平推拉式夹钳74,使水平推拉式夹钳74的压头抵接于支撑板14,从而将支撑板14压紧在第二定位块71上;将连接轴15穿过两个第二定位孔721、连接轴15套和两个连接轴15孔,并使连接轴15两端关于安装板2对称放置,推动连接轴15套使其抵接于远离定位杆5的支撑板14;调整支撑板14使支撑板14上开设的液压轴16孔与第三定位孔731对齐,拉动紧固推拉式夹钳75使压头抵接于支撑板14,从而将支撑板14压紧在第三定位块72与第四定位块73上,将液压轴16穿过两个第三定位孔731和两个液压轴16孔,并使液压轴16两端关于安装板2对称放置,将两个信号管17分别套在两个定位轴77上,使每个信号管17均能抵接于靠近支撑板14,随后操作焊枪对支撑板14与支撑管11抵接位置、液压轴16与支撑板14插接位置和信号管17与支撑板14抵接位置进行焊接,多个装置之间相互配合关系稳定,提高焊接精度同时便于同步加工和机械加工,避免使用人工夹持各部件。
42.本技术实施例一种举升机的双支臂焊接工装实施原理为:用户使用时,将支撑管11放置于安装板2的定位架61与第一定位块62之间,使支撑管11两端对称放置于两侧安装板2上,推动竖直推拉式夹钳64使压头抵接于支撑管11侧面,将支撑管11压紧于支撑架12上,将定位杆5插接于穿线板13,使穿线板13与支撑管11侧面抵接;其中一个安装板2上,将两个支撑架12分别放在两个第一定位块62相互靠近方向一侧,使用固定杆63穿过第一定位孔621将两个支撑架12压紧,使其抵接于支撑管11侧面。将两个支撑板14分别放在第二定位块71相互靠近方向一侧,让支撑板14分别与第二定位块71抵接,调节相对位置使第二定位孔721与连接轴15孔对齐,使第三定位孔731与液压轴16孔沿对齐,操作水平推拉式夹钳74将支撑板14压紧在第二定位上,这时候因为第二定位块71、第三定位块72和第四定位块73阵列设置,所以支撑板14也将抵接在第三定位块72和第四定位块73上,将连接轴15穿过两个第二定位孔721、连接轴15套和两个连接轴15孔,推动连接轴15套抵接于支撑板14,并让连接轴15两端关于安装板2对称设置;将液压轴16穿过两个第三定位孔731和两个液压轴16孔,并让液压轴16两端关于安装板2对称设置,将两个信号管17分别套在两个定位轴77上,使信号管17外侧抵接于支撑板14,操作焊枪分别对穿线板13与支撑管11抵接处,支撑架12和支撑管11抵接处、支撑板14和支撑管11抵接处、连接轴15套和第二定位孔721抵接处、液
压轴16和支撑板14插接处和信号管17与支撑板14抵接处进行焊接,整个焊接加工过程中各部件配合关系和相对位置关系明确,能保证较高的加工精度和较低的废品率。
43.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1