一种用于高速冲槽机上的带理片的机器人上下料系统的制作方法
1.本实用新型涉及高速冲槽机上下料系统技术领域,尤其涉及一种用于高速冲槽机上的带理片的机器人上下料系统。
背景技术:
2.国产高速冲槽机于上世纪八十年代诞生,核心技术是肘杆机构为主传动,加福开森凸轮分度箱进行分度,直到本世纪2010年才有由伺服电机分度的高速冲槽机,目前,在电机厂或冲片中心用高速冲槽机将毛坯冲片冲制成电机转、定子片的过程中,现有的毛坯冲片的在冲槽工位上的上下料方式主要分为人工上下料和机器人上下料。
3.而采用人工上下料的方式,由于人的视觉作用,使毛坯冲片工位上的毛坯冲片料垛无需整齐,人工就能完成上下料的工作,但人工上下料存在工作环境差,劳动强度大的问题;
4.而采用机器人上下料的方式,若加装电子视觉系统,则价格非常昂贵,成本大,且需要毛坯冲片工位上的毛坯冲片料垛非常整齐,不仅要求料垛上的每一张毛坯冲片的定位内孔要整齐,而且反映毛坯冲片圆周相位的扣片槽也要整齐,从而导致毛坯冲片料垛的码垛工作量大,影响了整体的生产效率,因此,本实用新型提出一种用于高速冲槽机上的带理片的机器人上下料系统用以解决现有技术中存在的问题。
技术实现要素:
5.针对上述问题,本实用新型的目的在于提出一种用于高速冲槽机上的带理片的机器人上下料系统,解决高速冲槽机工作时现有的人工上下料方式存在工作环境差,劳动强度大的问题,以及现有的机器人上下料方式存在成本大且影响生产效率的问题。
6.为了实现本实用新型的目的,本实用新型通过以下技术方案实现:一种用于高速冲槽机上的带理片的机器人上下料系统,包括取料机器人和高速冲槽机,所述取料机器人安装于高速冲槽机的正前方,所述取料机器人的一侧安装有毛坯冲片工位,所述高速冲槽机靠近毛坯冲片工位的一侧安装有理片工位,所述高速冲槽机上安装有冲槽工位,所述冲槽工位上安装有定心头,所述高速冲槽机远离理片工位的一侧安装有定子片工位,所述取料机器人远离毛坯冲片工位的一侧安装有转子片工位。
7.进一步改进在于:所述取料机器人的前端手臂上安装有左抓手和右抓手,所述左抓手位于靠近转子片工位的一侧,所述右抓手位于靠近毛坯冲片工位的一侧。
8.进一步改进在于:所述毛坯冲片工位上放置有毛坯冲片料垛,所述毛坯冲片工位底部设有采用电控的第一自动升降台。
9.进一步改进在于:所述理片工位顶端四周对称分布有气缸,所述理片工位顶端中间位置设有通过马达驱动旋转的转盘。
10.进一步改进在于:所述定子片工位上放置有定子冲片料垛,所述定子片工位设有采用电控的第二自动升降台。
11.进一步改进在于:所述转子片工位上放置有转子片料垛,所述转子片工位顶端设有简易托盘,所述简易托盘顶端设有芯轴。
12.本实用新型的有益效果为:本实用新型包括取料机器人和高速冲槽机,采用取料机器人抓取物料并从右侧向左侧,按节拍传递运送,并在运送过程中通过理片工位进行理片,无需人工操作,且系统结构简单、制造成本低、操作方便和控制系统稳定等特点,具有降低劳动强度,提高生产效率的优点,适用于电机厂或冲片中心采用高速冲槽机冲制电机铁芯片槽孔的毛坯冲片的上下料之用。
附图说明
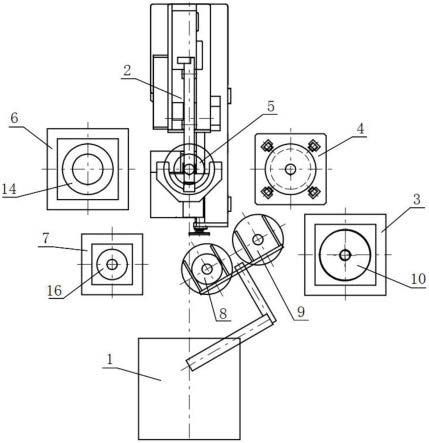
13.图1是本实用新型的系统的俯视结构示意图;
14.图2是本实用新型的毛坯冲片工位结构示意图;
15.图3是本实用新型的理片工位结构示意图;
16.图4是本实用新型的冲槽工位结构示意图;
17.图5是本实用新型的定子片工位结构示意图;
18.图6是本实用新型的转子片工位结构示意图。
19.其中:1、取料机器人;2、高速冲槽机;3、毛坯冲片工位;4、理片工位;5、冲槽工位;6、定子片工位;7、转子片工位;8、左抓手;9、右抓手;10、毛坯冲片料垛;11、第一自动升降台;12、气缸;13、转盘;14、定子冲片料垛;15、第二自动升降台;16、转子片料垛;17、简易托盘;18、芯轴。
具体实施方式
20.为了加深对本实用新型的理解,下面将结合实施例对本实用新型做进一步详述,本实施例仅用于解释本实用新型,并不构成对本实用新型保护范围的限定。
21.根据图1、图2、图3、图4、图5、图6所示,本实施例提供了一种用于高速冲槽机上的带理片的机器人上下料系统,包括取料机器人1和高速冲槽机2,取料机器人1安装于高速冲槽机2的正前方,取料机器人1的右侧安装有毛坯冲片工位3,高速冲槽机2的右侧安装有理片工位4,毛坯冲片工位3位于理片工位4的前方,高速冲槽机2上安装有用于放置毛坯冲片并进行冲槽加工的冲槽工位5,冲槽工位5上安装有用于放置毛坯冲片的定心头,高速冲槽机2的左侧安装有定子片工位6,取料机器人1的左侧安装有转子片工位7,转子片工位7位于定子片工位6的前方,加工时物流方向从右向左,即毛坯冲片由机器人1抓取后,从右侧向左侧,按节拍传递运送,先启动取料机器人1并利用其右抓手9抓取毛坯冲片工位3上的毛坯冲片至理片工位4进行理片,再将理片工位4上理好的毛坯冲片抓取到冲槽工位5,接着启动高速冲槽机2对冲槽工位5上的毛坯冲片进行冲槽加工,加工完成后利用取料机器人1的左抓手8将冲槽工位5上已经冲好的定子冲片和转子冲片分别放置到定子片工位6和转子片工位上。
22.取料机器人1的前端手臂上安装有左抓手8和右抓手9,左抓手8位于靠近转子片工位7的一侧,右抓手9位于靠近毛坯冲片工位3的一侧,其中右抓手9用于抓取毛坯冲片工位3上的毛坯冲片至理片工位4,然后将理片工位4上理好的毛坯冲片抓取到冲槽工位5,其中左抓手8抓取冲槽工位5上已经冲好的定子冲片和转子冲片,分别放至定子片工位6和转子片
工位7。
23.毛坯冲片工位3上放置有由毛坯冲片组成的毛坯冲片料垛10,毛坯冲片工位3底部设有采用电控的第一自动升降台11,能根据系统控制自动升降,保证毛坯冲片料垛10的上平面高度始终不变,使得右抓手9抓取毛坯冲片更加方便、快捷,当毛坯冲片料垛最上面的一张毛坯冲片被取走后,毛坯冲片料垛10自动向上升起一张片厚的距离,直至毛坯冲片全部取完。
24.理片工位4顶端四周对称分布有气缸12,理片工位4顶端中间位置设有通过马达驱动旋转的转盘13,当毛坯冲片放置到理片工位4上时,首先,周围分布的气缸12推动毛坯冲片至理片工位4的中心处,实现毛坯冲片的定位内孔中心定位的功能,然后转盘13带动毛坯冲片旋转,当毛坯冲片的内孔标识槽,即扣片槽,旋转到设定的圆周位置时,固定的销键挡住扣片槽,使得毛坯冲片不在旋转,这样每张毛坯冲片的扣片槽都在此位置,实现了毛坯冲片圆周相位的整理功能。
25.定子片工位6上放置有由定子冲片组成的定子冲片料垛14,定子片工位6设有采用电控的第二自动升降台15,能根据系统控制自动升降,保证定子冲片料垛14的上平面高度始终不变,使得定子冲片码垛整齐。
26.转子片工位7上放置有由转子片组成的转子片料垛16,转子片工位7顶端设有用于放置转子片的简易托盘17,简易托盘17顶端设有芯轴18,芯轴18的尺寸与转子片内侧孔径适配。
27.工作时,物流方向从右向左,先启动取料机器人1并利用其右抓手9抓取毛坯冲片工位3上等待冲制的至理片工位4进行理片,再将理片工位4上理好的毛坯冲片抓取到冲槽工位5,接着启动高速冲槽机2对冲槽工位5上的毛坯冲片进行冲槽加工,加工完成后利用取料机器人1的左抓手8将冲槽工位5上已经冲好的定子冲片和转子冲片分别放置到定子片工位6和转子片工位上,即完成高速冲槽机1加工过程中的上下料工作。
28.以上显示和描述了本实用新型的基本原理、主要特征和优点。本行业的技术人员应该了解,本实用新型不受上述实施例的限制,上述实施例和说明书中描述的只是说明本实用新型的原理,在不脱离本实用新型精神和范围的前提下,本实用新型还会有各种变化和改进,这些变化和改进都落入要求保护的本实用新型范围内。本实用新型要求保护范围由所附的权利要求书及其等效物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1