一种制动蹄用的自动铆接机的制作方法
本技术涉及铆接,特别是一种制动蹄用的自动铆接机。
背景技术:
1、目前对制动蹄的蹄铁和摩擦片的铆接,大多数是由操作人员手动拿着工件(比如制动蹄),配合铆接设备进行一个孔一个孔铆接,这样操作人员劳动强度大,操作人员的手在铆接设备的液压杆附近工作,危险性高。
2、制动蹄的孔位设有多排多孔位,采用单独铆接装置对一个一个孔位进行铆接,精准度低,铆接工作效率低。
3、因此,如何实现对制动蹄的蹄铁和摩擦片的自动铆接,提高铆接效率,提高铆接精度,提高操作人员的操作安全性成为需要解决的技术问题。
技术实现思路
1、本实用新型的目的在于提供一种制动蹄用的自动铆接机,主要解决上述现有技术存在如何实现对制动蹄的蹄铁和摩擦片的自动铆接,提高铆接效率,提高铆接精度,提高操作人员的操作安全性的问题。
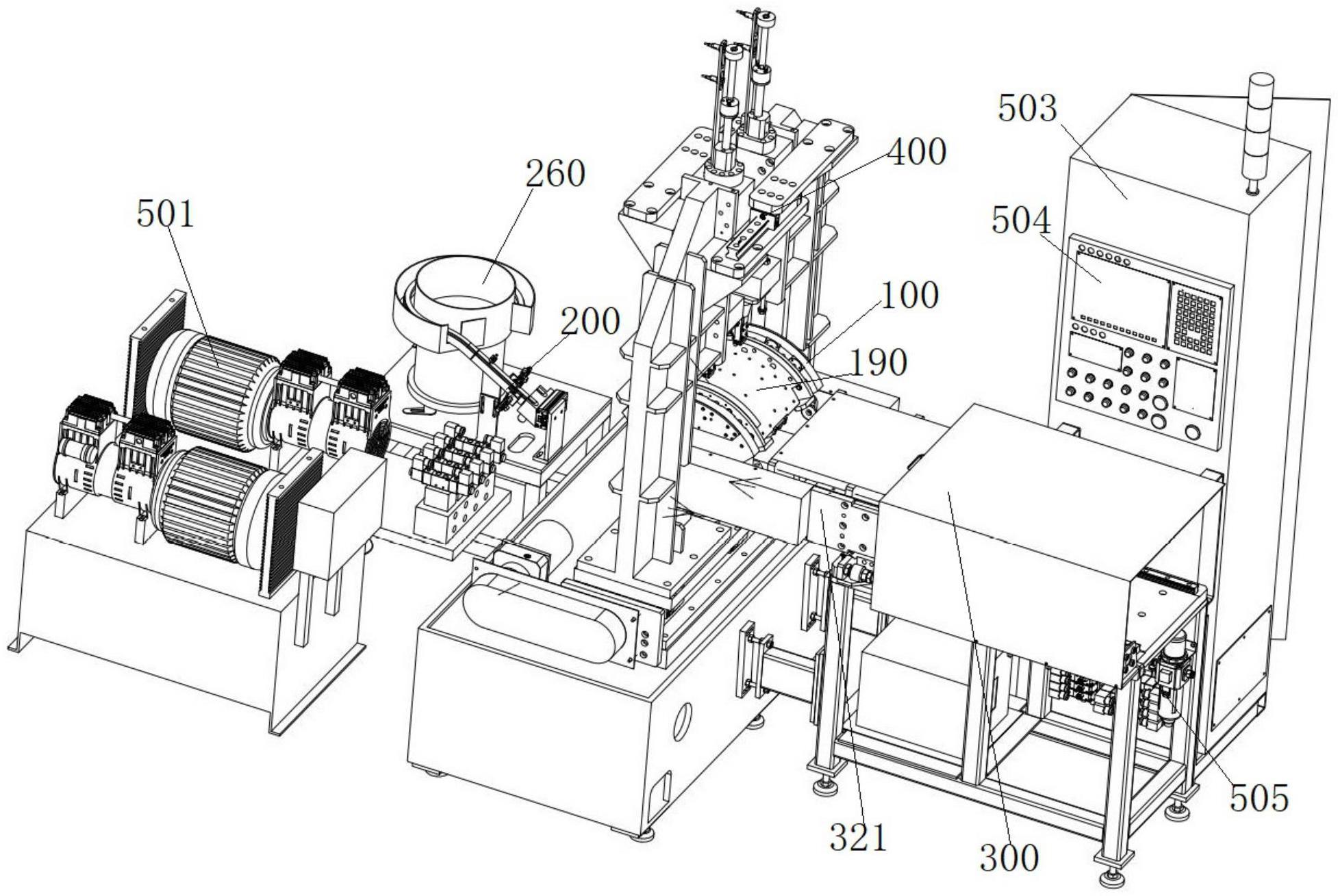
2、为了实现上述目的,本实用新型所采用的技术方案是:一种制动蹄用的自动铆接机,其特征在于:该自动铆接机包括用于夹紧制动蹄的夹紧机构、用于带动夹紧机构旋转和定位的旋转定位机构、用于带动旋转定位机构移动的移动机构、用于对制动蹄进行铆接的自动铆接机构、用于为自动铆接机构提供铆钉的供料机构和控制机构;
3、夹紧机构连接在旋转定位机构上,旋转定位机构连接在移动机构,移动机构带动旋转定位机构移动使得被夹紧机构夹紧的制动蹄移至自动铆接机构用于制动蹄进行铆接的铆接位置,旋转定位机构控制制动蹄调整铆接角度;
4、控制机构控制夹紧机构、旋转定位机构、移动机构、自动铆接机构和供料机构的运行。
5、进一步,所述夹紧机构为气动夹紧机构,气动夹紧机构包括至少一组气动可伸缩夹具,气动可伸缩夹具包括第一底座和第一托架;
6、所述第一底座设有第一压缩空气接口、至少一个缸体和第一压缩空气通道、第一压缩空气接口通过第一压缩空气通道连通缸体,缸体内设有用于在压缩空气作用下带动第一托架移动的气动活塞弹性装置。
7、进一步,所述气动活塞弹性装置包括活塞和活塞杆,活塞一侧和缸体内侧壁形成压缩空气腔,活塞另一侧连接活塞杆一端,活塞杆另一端延伸至缸体外并连接第一托架,活塞另一侧和缸体内侧壁之间设有弹性部;和/或所述第一底座为扇形,第一托架为圆弧形;
8、和/或所述第一底座朝向第一托架一侧设有第一导向轴,第一托架设有第一导向孔,第一导向轴同第一导向孔相匹配。
9、进一步,所述气动夹紧机构包括一组气动可伸缩夹具和一组固定夹具,固定夹具包括第二固定底座和第二托架,第二固定底座和第二托架连接,或第二固定底座和第二托架通过固定杆连接,气动可伸缩夹具和固定夹具用于分别夹紧制动蹄两端;第一底座和第二固定底座分别设有连接轴;
10、或所述气动夹紧机构包括两组气动可伸缩夹具,用于分别夹紧制动蹄两端;两个第一底座分别设有连接轴;
11、或所述气动夹紧机构包括两组气动可伸缩夹具,用于分别夹紧制动蹄两端,其中一组气动可伸缩夹具的第一导向轴设有用于对第一托架进行限位的固定套;两个第一底座分别设有连接轴。
12、进一步,所述旋转定位机构包括驱动轴和第一驱动装置,第一驱动装置控制驱动轴旋转,驱动轴控制气动夹紧机构旋转,实现制动蹄的旋转和定位。
13、进一步,所述气动夹紧机构连接第三从动同步轮,驱动轴连接第三驱动同步轮,第三从动同步轮第三驱动同步轮通过同步带形成第一传动机构,第一传动机构控制气动夹紧机构旋转;第三从动同步轮同相应气动夹紧机构的连接轴连接。
14、进一步,所述第一驱动装置包括第三伺服电机,第三伺服电机同驱动轴之间还设有减速机,第三伺服电机和减速机共同控制驱动轴旋转。
15、进一步,所述移动机构包括移动台和第二底座,第二底座设有第五气缸和第五滑轨,移动台底部设有第五滑块,第五滑块同第五滑轨相匹配,第五气缸带动移动台在第二底座上平移。
16、进一步,所述移动台上设有两个横向固定板、以及纵向固定板,驱动轴两端贯穿两个横向固定板后,分别连接第三驱动同步轮,气动夹紧机构的两个连接轴分别贯穿相应的横向固定板后,分别连接相应的第三从动同步轮;
17、两个横向固定板对应第三驱动同步轮和第三从动同步轮之间分别设有竖直方向的条形贯穿孔,贯穿孔内设有第三张紧同步轮;
18、第一底座背向第一托架的一侧设有第一凸起部,横向固定板上设有第三检测装置,第三检测装置对第一凸起部的位置进行检测并向控制机构反馈。
19、进一步,所述供料机构包括给料机和分铆钉机构,分铆钉机构包括用于铆钉运输的出料通道,出料通道一端为用于接收给料机下落铆钉的第一上料口,出料通道的另一端为第一下料口,用于将两个以上铆钉接收口分别对应第一下料口的换向装置,换向装置靠近第一下料口,和用于控制第一下料口的铆钉下料频率的阻挡装置,阻挡装置位于出料通道上方。
20、进一步,所述换向装置包括换向块和第三气缸,换向块上设有两个以上铆钉接收口,第三气缸带动换向块移动,将两个以上铆钉接收口分别对应第一下料口,分别接收第一下料口下落的铆钉;
21、每个铆钉接收口底端连接出料管路,出料管路连通用于向出料管路注入压缩空气的压缩空气接口。
22、进一步,所述阻挡装置包括第一阻挡器,第一阻挡器由第一气缸控制运行,第一阻挡器对应第一下料口处;所述阻挡装置包括第二阻挡器,第二阻挡器由第二气缸控制运行,第二阻挡器对应第一上料口和第一阻挡器之间的出料通道;
23、所述出料通道设有用于检测铆钉的第一检测开关和第二检测开关,第一检测开关对应第一上料口,第二检测开关对应第一下料口,第一检测开关和第二检测开关向控制机构反馈检测信息。
24、进一步,所述出料通道包括底板和两个侧板,底板和两个侧板形成凹槽通道,凹槽通道上方设有第三限位部,当铆钉在出料通道中移动时,第三限位部对铆钉进行限位;
25、和/或所述出料通道为直线型,呈倾斜设置,第一上料口高于第一下料口,出料通道下方还设有用于调节出料通道倾斜角度的调节装置;
26、和/或给料机为圆盘振动给料机。
27、进一步,所述调节装置包括第一支撑杆、第一连接板、第一支撑座、第一支撑座设有第一导轨装置,第一连接板设有第一孔,第一支撑杆顶端同出料通道连接,第一支撑杆的底端贯穿第一孔后,第一支撑杆和第一连接板连接;
28、所述第一连接板在第一导轨装置的带动下移动,第一连接板带动第一支撑杆同步移动,第一支撑杆调节第一上料口的高度,间接调整出料通道的倾斜角度;
29、所述第一导轨装置包括由两根平行的第二支撑部形成的滑槽、螺栓和螺母,第一连接板设有第二孔;
30、所述调节装置包括第一套调节装置和第二套调节装置,其中第一套调节装置的第一支撑杆顶端同出料通道上靠近第一上料口的一端连接,和/或第二套调节装置的第一支撑杆顶端同出料通道上靠近第一下料口的一端连接;
31、所述螺母位于滑槽内,螺母的螺杆贯穿第一连接板的第二孔后连接螺栓,实现螺母带动第一连接板沿着滑槽滑动;
32、所述铆钉接收口位于出料管路的正上方,压缩空气接口位于出料管路的斜上方。
33、进一步,所述自动铆接机构为间距可调的自动铆接机构,包括两个以上的铆接装置、用于带动铆接装置移动的第二驱动装置,实现两个以上的铆接装置之间的间距调节。
34、进一步,所述铆接装置为两套,分别为第一铆接装置和第二铆接装置;
35、所述第二驱动装置包括两根平行的导轨、用于带动第一铆接装置移动的第一移动板、用于带动第二铆接装置移动的第二移动板、同导轨平行的第一滚珠丝杆、第一滚珠丝杆螺母副,同导轨平行的第二滚珠丝杆、第二滚珠丝杆螺母副;
36、第一铆接装置设置在第一移动板上,第一移动板底部设有同两根平行的导轨相匹配的第一滑块,第一移动板底部还连接第一滚珠丝杆螺母副,第一滚珠丝杆控制第一滚珠丝杆螺母副移动;
37、第二铆接装置设置在第二移动板上,第二移动板底部设有同两根平行的导轨相匹配的第二滑块,第二移动板底部还连接第二滚珠丝杆螺母副,第二滚珠丝杆控制第二滚珠丝杆螺母副移动;
38、所述第二驱动装置包括第一伺服电机和第二伺服电机,第一伺服电机连接第一驱动同步轮,第一滚珠丝杆的一端连接第一从动同步轮,第一驱动同步轮和第一从动同步轮通过第一同步带实现联动;第二伺服电机连接第二驱动同步轮,第二滚珠丝杆的一端连接第二从动同步轮,第二驱动同步轮和第二从动同步轮通过第二同步带实现联动。
39、进一步,所述第一铆接装置包括第一立柱,第二铆接装置包括第二立柱;
40、第一立柱一侧靠近顶端处设有第一支撑板,第一支撑板设有第三导轨,第二立柱一侧靠近顶端处设有第二支撑板,第二支撑板设有第三滑块,第三滑块同第三导轨可移动地连接;
41、和/或第二立柱另一侧靠近顶端处设有第三支撑板,第三支撑板设有第四导轨,第一立柱另一侧靠近顶端处设有第四支撑板,第四支撑板设有第四滑块,第四滑块同第四导轨可移动地连接。
42、进一步,每套铆接装置包括上部液压缸,上部液压缸设置在立柱的上部,上部液压缸包含用于铆接铆钉的上压杆和用于上压杆移动的腔体,腔体底部设有两个以上的可翻转夹爪,两个以上的可翻转夹爪中间为镂空空间,该镂空空间用于放置铆钉和/或定位铆钉;
43、所述腔体外侧壁设有弹性o形圈,弹性o形圈对应可翻转夹爪的外侧壁;
44、所述可翻转夹爪底部设有用于支撑铆钉的台阶部,台阶部的顶部呈倾斜设置;
45、每个所述腔体连通倾斜的管路旁通,管路旁通连接铆钉供料软管一端,供料软管另一端连接出料管路,铆钉从供料机构通过压缩空气吹送至间距可调的自动铆接机构的铆接位置;
46、上部液压缸顶部还设有用于对上压杆移动距离进行检测的行程光电检测装置和用于对上压杆移动距离进行限位的可调节限位块;行程光电检测装置向控制机构反馈上压杆的移动情况。
47、进一步,所述控制机构控制充气设备通过压缩空气接口向压缩空气腔内注入压缩空气,压缩空气腔设有排气口,所述控制机构控制排气口的排气;
48、控制机构控制旋转定位机构的第三伺服电机、减速机和第五气缸的运行;
49、控制机构控制第一气缸、第二气缸和第三气缸的运行;
50、控制机构控制铆接装置的上部液压缸、下部液压缸、第一伺服电机和第二伺服电机的运行,控制机构连接报警器。
51、鉴于上述技术特征,本实用新型具有如下优点:
52、1、本实用新型的气动夹紧机构,只要将工件放入气动夹紧机构中,通过设有气动可伸缩夹具(即气动活塞弹性装置带动第一托架),工件将被自动夹紧,配合铆接设备完成工件的铆接,铆接效率高、铆接质量好、操作人员劳动强度底,操作人员面临的危险性小;另外,通过旋转连接轴带动气动夹紧机构旋转,间接实现工件旋转,配合铆接设备,完成工件上不同角度的铆接操作,铆接效率更高。
53、2、本实用新型的旋转定位机构,通过气动夹紧机构夹紧工件(比如制动蹄),通过第一驱动装置和驱动轴带动气动夹紧机构和工件同步旋转和定位(即旋转一定角度后停止不动,便于对制动蹄上相应孔进行铆接),配合铆接设备完成工件的铆接。
54、3、本实用新型的旋转定位机构,通过移动台和第五气缸实现移动台的平移,移动台带动第三伺服电机、减速机、驱动轴以及气动可伸缩夹具和制动蹄,整体进行平移,最终实现被夹紧的制动蹄移至指定位置进行旋转和定位,便于铆接设备对制动蹄相应孔进行铆接,这样移动台带动制动蹄远离指定位置时,便于制动蹄上件和下件,移动台带动制动蹄到达指定位置时,便于铆接设备对制动蹄进行铆接,极大提供操作人员的安全性。
55、4、本实用新型的旋转定位机构,通过控制机构控制第三伺服电机、减速机和第五气缸的运行,控制机构控制充气设备通过压缩空气接口向压缩空气腔内注入压缩空气,压缩空气腔设有排气口,所述控制机构控制排气口的排气,也就是说操作人员只要对气动可伸缩夹具完成制动蹄上件(对应初始位置),制动蹄将被自动夹紧、送达指定位置,便于铆接设备对其铆接,并实现制动蹄旋转和定位,便于铆接设备对制动蹄旋的全部需要铆接的孔进行铆接,铆接完成后,制动蹄旋将被移回至初始位置,便于下件,使得铆接的整个过程,安全高效。
56、5、本实用新型的旋转定位机构,由控制机构通过第三伺服电机、减速机、驱动轴、第一传动机构共同作用,间接地控制气动可伸缩夹具进行旋转、旋转速度以及停止旋转,提高工作效率。
57、6、本实用新型的旋转定位机构,通过第一底座的第一凸起部和移动台(即纵向固定板)的第三检测装置相配合,即第三检测装置通过监测第一凸起部的位置,来判断气动夹紧机构的气动可伸缩夹具旋转角度,并将监测信息反馈给控制机构,由控制机构通过第三伺服电机、减速机、驱动轴、第一传动机构共同作用,间接地控制气动可伸缩夹具停止旋转,实现制动蹄的定位,便于对制动蹄进行铆接操作,以及间接地控制气动可伸缩夹具再一次开始旋转。
58、7、本实用新型的旋转定位机构,其中气动夹紧机构,只要将工件放入气动夹紧机构中,通过设有气动可伸缩夹具(即气动活塞弹性装置带动第一托架),工件将被自动夹紧,配合铆接设备完成工件的铆接,铆接效率高、铆接质量好、操作人员劳动强度底,操作人员面临的危险性小;另外,通过旋转连接轴带动气动夹紧机构旋转,间接实现工件旋转,配合铆接设备,完成工件上不同角度的铆接操作,铆接效率更高。
59、8、本实用新型的分铆钉机构,通过阻挡装置和换向装置的配合,实现一台给料机实现连续、均匀地向多个通道供应铆钉,比如说依次地向多个通道连续提供铆钉,控制铆钉依次下料频率,实现均匀地向多个通道供应铆钉的目的。不需要使用多台给料机,这样成本低,整体供料设备的占地面积小。
60、9、采用单通道单出口的给料机,配合本实用新型的分铆钉机构,即可实现一台给料机实现连续、均匀地向多个通道供应铆钉,比如说依次地向多个通道连续提供铆钉,控制铆钉依次下料评率,实现均匀地向多个通道供应铆钉的目的。不需要人工将铆钉一个个放置在摩擦片的孔位内再进行铆接,人工参与度有效降低,提高生产效率。
61、10、本实用新型的一种间距可调的自动铆接机构,通过两个以上的铆接装置(比如说两个铆接装置)同步地对相应制动蹄的孔位进行铆接,提高制动蹄的孔位铆接工作效率,比如说一组两个孔位,通过两个铆接装置实现同步铆接,提高铆接工作效率。
62、11、本实用新型的一种间距可调的自动铆接机构,设有用于带动铆接装置移动的第二驱动装置,实现两个以上的铆接装置之间的间距调节,比如说实现两个铆接装置之间的间距调节,用于对同一个制动蹄的不同间距的孔位完成铆接或者用于对不同规格制动蹄的不同间距的孔位完成铆接,即能满足多个不同位置孔位(比如说两不同位置孔位)的铆接要求,极大扩展了自动铆接机构适用场景,节约加工成本。当然自动铆接机构的两个以上的铆接装置,也可以是其中一个铆接装置单独对制动蹄的孔位进行铆接,通过调整两个或其中一个铆接装置的位置,对制动蹄上特殊位置的孔位进行单独铆接。
63、12、本实用新型的一种间距可调的自动铆接机构,在两个以上的铆接装置的立柱顶端设有重载型滚柱导轨滑块装置,以两个铆接装置为例,设置重载型滚柱导轨滑块装置,两个立柱可以相互移动,在不影响两个立柱的移动的前提下,还能有效避免第一立柱和第二立柱相互倾斜,避免造成第一立柱和第二立柱向外倾斜,确保两个铆接装置的上部液压缸的上部铆接头(即上压杆的铆接端)保持垂直,实现精准的铆钉铆接效果。
64、13、本实用新型的自动铆接机,通过控制机构控制夹紧机构、旋转定位机构、移动机构、自动铆接机构和供料机构的运行,实现制动蹄的蹄铁和摩擦片的自动铆接,操作人员只要在夹紧机构上装设制动蹄(包括蹄铁和摩擦片),制动蹄就会被旋转定位机构和移动机构送至自动铆接机构,由供料机构向自动铆接机构自动提供铆钉,再由自动铆接机构对制动蹄进行精准铆接,铆接过程中,旋转定位机构控制制动蹄角度调整,由自动铆接机构对制动蹄上各个铆接孔全部进行精准铆接,整个设备操作简单、安全高效,能够实现自动化铆接,提高了铆接定位的精度,减少了操作人员劳动强度,提高操作人员的安全性,降低了对操作人员操作要求,便于进行大批量、一致性的产品生产。
- 还没有人留言评论。精彩留言会获得点赞!