一种锅筒焊接机器人的柔性连接装置的制作方法
本发明涉及锅筒焊接用机器,尤其涉及一种锅筒焊接机器人的柔性连接装置。
背景技术:
1、锅筒是水管锅炉中用以进行汽水分离和蒸汽净化,组成水循环回路并蓄存锅水的筒形压力容器。锅筒主要由两个半径为0.5m至1.2m的刚性筒体和数千根半径为44mm至55mm换热管构成。由于锅筒与换热管连接处必须完全密闭,因此需要在锅筒内沿着换热管外壁进行环缝焊接。传统的人工焊接需要多名焊工轮流在刚性筒体内逐一进行焊接,此种方式不仅耗费人力,效率低,且约束条件较多,为了能够提高焊接效率,因此采用机器人焊接。
2、在锅筒内使用机器人焊接,难点在于需要准确的对不同位置的管孔进行定位,机器人在焊接过程中需要先移动定位轴后,将定位轴伸入待焊接的换热管内,以定位轴为焊枪的环缝中心进行环缝焊接,然而在锅筒中的曲面空间无法保证每一根换热管都是垂直于曲面内壁,存在有一定的偏差,进而定位轴在多次定位后,因误差累积,则会使机器人的定位轴的轴线无法与换热管的轴线重合,使得定位轴出现卡死或者焊枪的环缝中心偏移,从而导致机器人焊接出现虚焊、漏焊等情况。
技术实现思路
1、本发明所要解决的技术问题是:提供一种锅筒焊接机器人的柔性连接装置,能够使机器人的定位轴与待焊接的换热管同轴,保证环缝焊接质量。
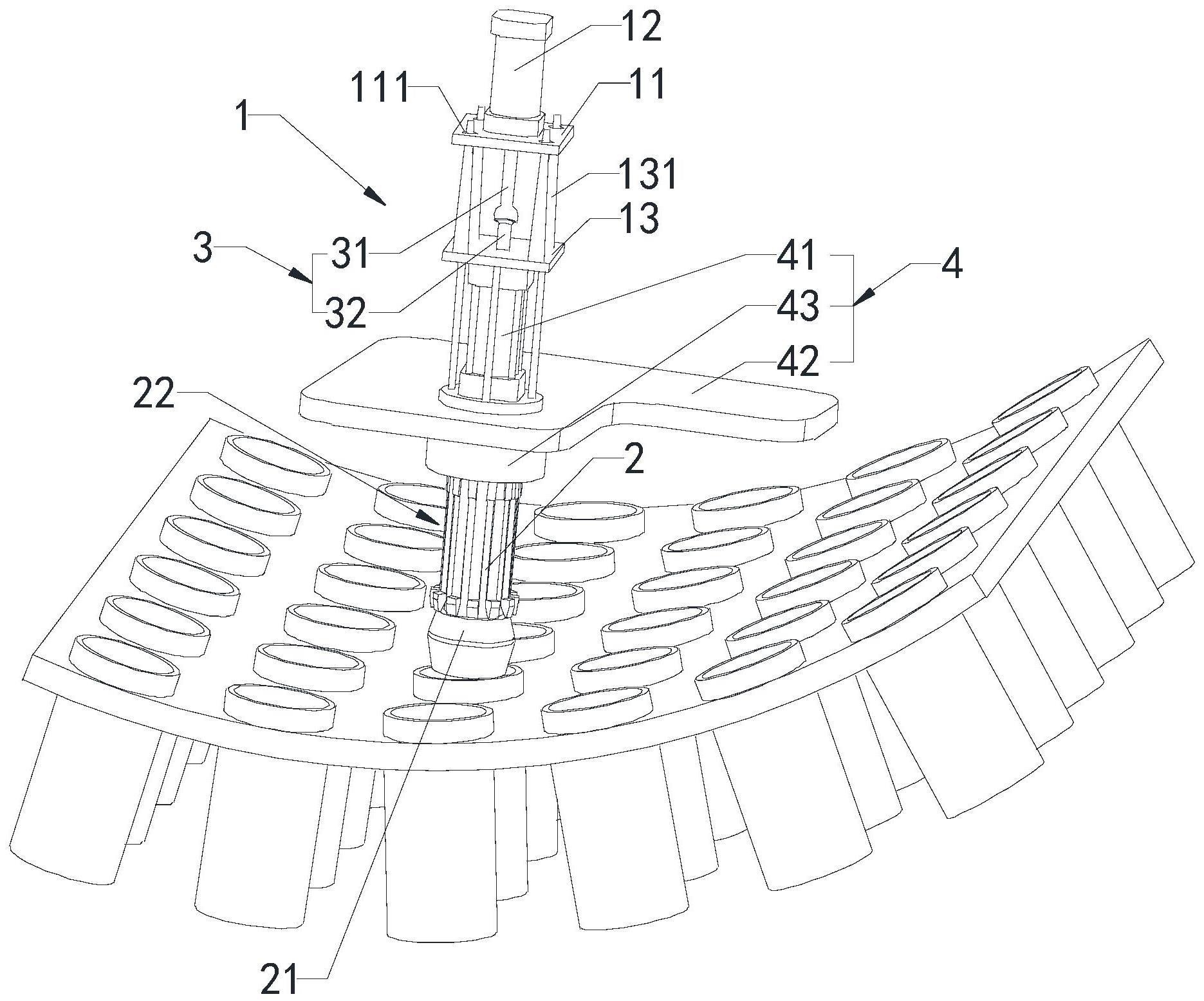
2、为了解决上述技术问题,本发明采用的技术方案为:一种锅筒焊接机器人的柔性连接装置,包括柔性组件;所述柔性组件包括固定板、第一气缸和活动板;
3、所述固定板沿厚度方向两侧分别设置有第一气缸和活动板,所述固定板上设置有通孔;
4、所述第一气缸的活动端穿过固定板与活动板朝向固定板的一端面球铰接;
5、所述活动板朝向固定板的一端面上设置有圆台,所述圆台的小径端穿过通孔,所述圆台的最大直径大于或者等于通孔的直径,所述活动板远离固定板的一端面与所述锅筒焊接机器人的定位轴连接。
6、本发明的有益效果在于:将锅筒焊接机器人的定位轴与柔性组件连接,利用第一气缸使活动板远离固定板,即让圆台的大径端退出固定板上的通孔,并同时由于第一气缸的活动端与活动板球铰接,进而活动板在远离固定板后能够发生摆动,从而在定位轴伸入待焊接的换热管过程中,利用活动板的摆动,使定位轴能够自行的摆正,进而让定位轴与待焊接的换热管同轴,以保证锅筒焊接机器人对换热管的环缝焊接质量。
技术特征:
1.一种锅筒焊接机器人的柔性连接装置,其特征在于:包括柔性组件;所述柔性组件包括固定板、第一气缸和活动板;
2.根据权利要求1所述锅筒焊接机器人的柔性连接装置,其特征在于:所述第一气缸的活动端最大伸出量小于圆台的长度。
3.根据权利要求1所述锅筒焊接机器人的柔性连接装置,其特征在于:所述第一气缸的活动端与活动板之间设置有球铰接组件;所述球铰接组件包括连接第一气缸的活动端的支座和螺纹连接活动板的连接杆,所述支座上设置有球笼,所述连接杆上设置有球头,所述球头转动设置在所述球笼内。
4.根据权利要求1所述锅筒焊接机器人的柔性连接装置,其特征在于:所述活动板远离固定板的一端设置有限位装置,所述限位装置包括第二气缸、限位板和抵接套;
5.根据权利要求4所述锅筒焊接机器人的柔性连接装置,其特征在于:所述弹性组件包括套环和多个沿套环轮廓周向设置的弹片,所述套环套设在定位轴的轴身上,且所述套环与抵接套相抵接,所述套环沿外轮廓周向设置装配槽,所述弹片的一端设置在装配槽内。
6.根据权利要求5所述锅筒焊接机器人的柔性连接装置,其特征在于:所述定位轴的轴身上套设有弹簧,所述弹簧的一端与套环相抵接,所述弹簧的另一端与扩张头相抵接。
7.根据权利要求4所述锅筒焊接机器人的柔性连接装置,其特征在于:所述扩张头远离第二气缸的一端设置有倒角。
技术总结
本发明涉及锅筒焊接用机器技术领域,具体涉及一种锅筒焊接机器人的柔性连接装置,包括柔性组件;所述柔性组件包括固定板、第一气缸和活动板;所述固定板沿厚度方向两侧分别设置有第一气缸和活动板,所述固定板上设置有通孔;所述第一气缸的活动端穿过固定板与活动板朝向固定板的一端面球铰接;所述活动板朝向固定板的一端面上设置有圆台,所述圆台的小径端穿过通孔,所述圆台的最大直径大于或者等于通孔的直径,所述活动板远离固定板的一端面与所述锅筒焊接机器人的定位轴连接。本发明能够补偿定位轴与待焊接的换热管之间的角度偏差,使定位轴与待焊接的换热管同轴。
技术研发人员:徐彩军,郑荣部,陈照春,曾耀传,杨天雪,许文倩
受保护的技术使用者:福建省特种设备检验研究院
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!