数控机床用机械臂的制作方法
本发明涉及机械臂,具体为数控机床用机械臂。
背景技术:
1、机械手臂是机械人技术领域中得到最广泛实际应用的自动化机械装置,在工业制造、医学治疗、军事等领域都能见到它的身影。尽管它们的形态各有不同,但它们都有一个共同的特点,就是能够接受指令,精确地定位空间上的某一点进行作业,但是现有市场上的机械臂设备大多为固定设置只通过臂展进行运动,无法更为方便的进行调节,现已有专利文件对此进行了改进。
2、如中国专利cn206702735u,一种数控机床机械臂,包括工作台、支撑臂和夹具手臂,所述支撑臂下方设有转台,所述转台下方设有固定座,所述固定座活动连接于工作台表面,所述固定座与工作台滑动连接,所述工作台固定于数控机床工作间内,所述支撑臂表面沿轴向设有螺纹,所述支撑臂后方设有滑动杆,所述夹具手臂垂直连接于支撑臂表面,所述夹具手臂与支撑臂通过螺纹转动连接,所述夹具手臂包括活动座、液压伸缩臂和液压夹头,所述活动座左端设有液压伸缩臂。通过液压马达带动支撑臂旋转,使机械臂工作时更加平稳;通过使用带有螺纹的支撑臂,便于调节夹具手臂的高度,提高夹具手臂的灵活度;通过较小的体积便于在较小的工作间内运行,提高机械臂的实用性。
3、上述文件虽然通过在工作台的内部安装有螺纹杆,用来对机械臂装置进行位置上的调节,但是在日常使用中实用性小,无法满足需求,如数控机床在加工时,周边的配套设备会设置有若干个,如进行送料的设备以及加工完成后用来将工件输送走的设备和码放的设备,这些设备必然是在机械臂装置的四周分别安装的,不会统一安装在两侧,并且设备与设备之间的间距也要进行合适的定距,这也就导致机械臂需要具有多向移动的功能,而文件中的设备只能够进行两个方向的调节,导致设备的功能性较差,同时无法运用于较为复杂的生产中,降低了实用性与适用度,所以现设计一种能够进行多向调节适用度广的数控机床用机械臂来解决此类缺陷。
技术实现思路
1、针对现有技术的不足,本发明提供了数控机床用机械臂,解决了当前的机械臂装置功能性低,只能进行两侧的方向调节,适用性不够的问题。
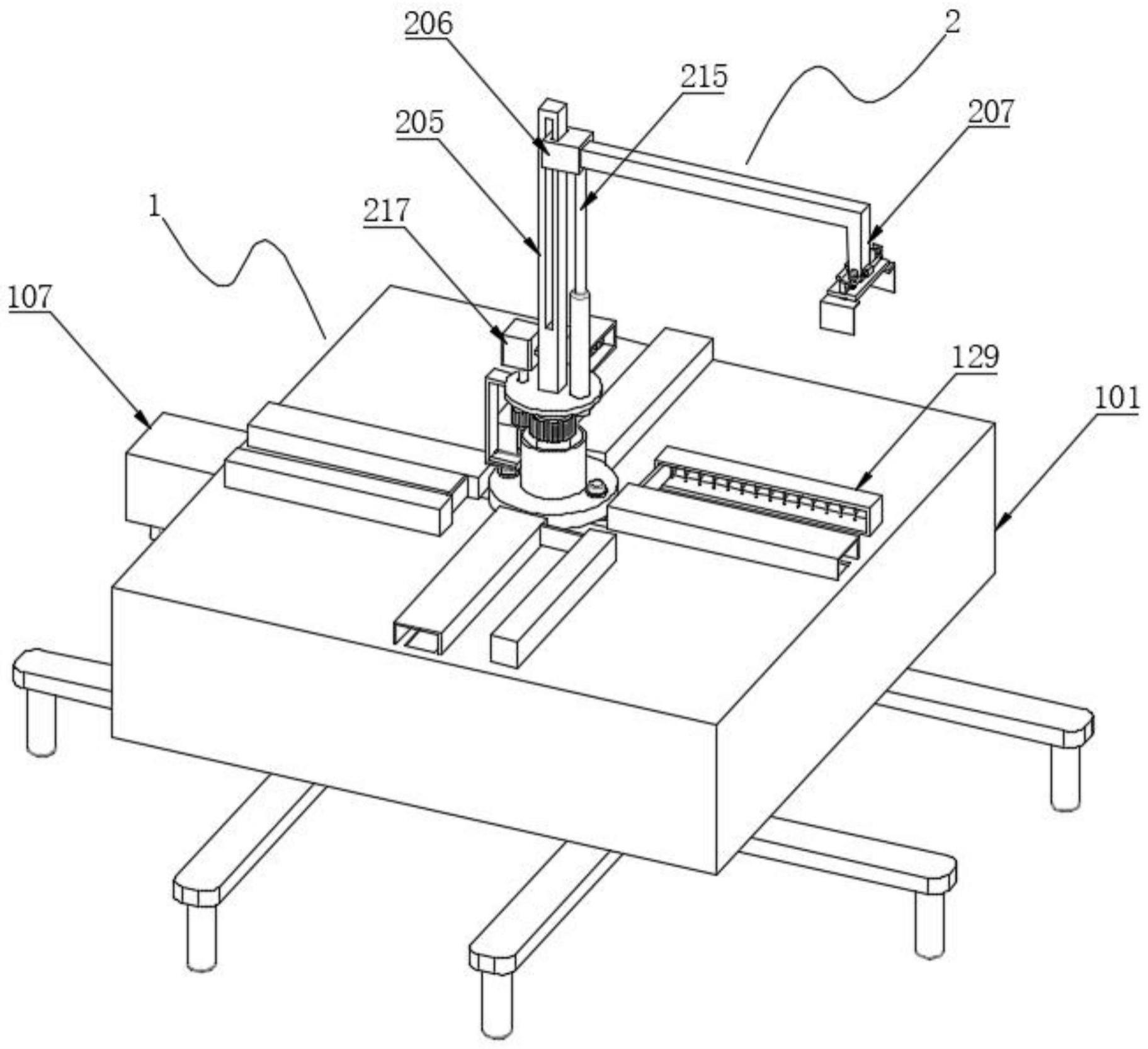
2、为实现以上目的,本发明通过以下技术方案予以实现:数控机床用机械臂,包括用于带动机械臂机构进行多向移动的移动机构,所述机械臂机构安装于移动机构的顶部,且机械臂机构用来对工件进行夹持。
3、优选的,所述移动机构包括底框,所述底框内腔的底部固定连接有十字滑槽板,所述十字滑槽板内侧的中部滑动安装有滑动柱,且滑动柱的顶部固定连接有移动座,所述底框内腔的两侧均通过轴承件转动连接有第一套筒螺纹杆,所述底框内腔的前部与后部均通过轴承件转动连接有第二套筒螺纹杆,所述底框的左侧固定连接有驱动箱,所述驱动箱的内部固定连接有第一电机,所述第一电机的输出轴通过联轴器固定连接有转动杆,且转动杆的右端依次贯穿驱动箱和底框并与第一套筒螺纹杆固定连接,所述底框内腔左侧的后部转动连接有横杆。
4、优选的,后部所述第二套筒螺纹杆的表面与横杆的右端均固定连接有相互啮合的锥齿轮,所述转动杆和横杆的表面且位于底框的内侧均固定连接有皮带轮,两个所述皮带轮之间通过皮带传动连接。
5、优选的,所述移动座左侧的上部和表面的下部均开设有螺纹槽,且螺纹槽延伸至另一侧,两个所述螺纹槽的内侧分别螺纹连接有与第一套筒螺纹杆和第二套筒螺纹杆相配合使用的第一螺纹筒和第二螺纹筒,所述多角杆的两端均滑动安装有与第一套筒螺纹杆和第二套筒螺纹杆相配合使用的多角杆,同一平面两个所述多角杆之间固定连接有第一弹簧,所述多角杆的表面且位于移动座的外部固定连接有挡片环,所述移动座表面的两侧以及右侧的前部与后部均通过限位滑片滑动安装有滑杆,所述滑杆靠近移动座的一侧通过开设开口滑动安装有伸缩杆。
6、优选的,所述伸缩杆远离滑杆的一端固定连接有与多角杆和挡片环相配合使用的弧形块,所述弧形块与滑杆之间固定连接有第二弹簧,且第二弹簧套接于伸缩杆的表面,同侧两个所述滑杆相对的一端均固定连接有拉索,所述移动座的表面和右侧且位于两个限位滑片之间均转动安装有导料轮,且导料轮与拉索相接触,所述移动座右侧的上部固定连接有与拉索相配合使用的分线板。
7、优选的,所述底框顶部的两侧以及前部与后部均开设有相互连通的移动槽,所述底框顶部两侧的前部与后部均固定连接有滑槽框,所述滑槽框的内部滑动安装有滑板,所述滑板的一侧固定连接有与移动槽相配合使用的遮盖,所述滑板和滑槽框的内壁之间固定连接有第三弹簧。
8、优选的,所述机械臂机构包括稳定盘,且稳定盘通过支架固定连接于移动座的上部,所述稳定盘的顶部固定连接有防护筒,所述防护筒内腔的底部固定连接有支撑柱,且支撑柱的顶端通过轴承件转动连接有旋转盘,所述旋转盘的顶部部固定连接有内槽滑柱,且内槽滑柱的表面滑动安装有滑动套,所述滑动套的右侧固定连接有臂杆,所述臂杆的右端固定连接有联动板,所述联动板顶部的前侧与后侧均开设有贯穿至底部的夹持槽,所述夹持槽的内侧滑动安装有夹持连块,且夹持连块的底部固定连接有夹件板。
9、优选的,所述臂杆的两侧且位于联动板的上部均固定连接有第一电动伸缩杆,且第一电动伸缩杆的一端与相近夹持连块固定连接,所述臂杆表面的下部通过开设开口固定连接有与夹持连块相配合使用的第一按钮,所述联动板的后部通过固定板固定连接有与夹持连块相配合使用的第二按钮,所述旋转盘顶部的右侧通过开设开口固定连接有气缸,且气缸的顶端与臂杆的底部固定连接。
10、优选的,所述内槽滑柱的左侧通过固定板固定连接有第二电机,且第二电机的输出轴通过联轴器固定连接有从动杆,且从动杆的底端贯穿旋转盘并延伸至旋转盘的下部,所述支撑柱的表面固定连接有齿环,且从动杆延伸至旋转盘下部的一端固定连接有与齿环相啮合的齿轮。
11、优选的,所述旋转盘顶部的两侧分别固定安装有第三按钮和第四按钮,所述旋转盘的左侧固定连接有与第四按钮和压动杆相配合使用的压动杆,所述防护筒内腔底部的前部与右侧均通过开设开口固定安装有第二电动伸缩杆,且第二电动伸缩杆的底端延伸至底框的内侧,所述第二电动伸缩杆延伸至底框内部的一端与相近拉索的一端固定连接。
12、有益效果
13、本发明提供了数控机床用机械臂。与现有的技术相比具备以下有益效果:
14、(1)、该数控机床用机械臂,通过在底框的内侧安装有移动座,并在移动座的内部分别安装有与第一套筒螺纹杆和第二套筒螺纹杆相配合使用的第一螺纹筒和第二螺纹筒,同时搭配第一按钮和第二按钮进行使用,这些结构的设置能够在夹件板夹持松开工件时,分别对第一按钮和第二按钮进行按压,使第一螺纹筒和第二螺纹筒内部的多角杆进行切换,完成移动座移动方向上的调节,提高了机械臂机构的适用度,满足当前繁琐的加工环境。
15、(2)、该数控机床用机械臂,通过在防护筒的底部安装有两个第二电动伸缩杆,并且两个第二电动伸缩杆分别与多角杆进行连接,搭配第一按钮与第二按钮进行使用,每当第一按钮和第二按钮被按压后,两个第二电动伸缩杆都会进行交错时的启动,将两组不同方位的多角杆进行切换,保证了机械臂机构能够由横向移动转换为竖向移动,节省了不同位置的驱动源安装,降低了能源消耗和成本。
16、(3)、该数控机床用机械臂,通过在稳定盘顶部的两侧分别安装有第三按钮和第四按钮,并搭配压动杆进行使用,这两组结构的设置能够在旋转盘通过第二电机的驱动进行旋转时,分别对第三按钮和第四按钮进行按压,从而切断第一按钮和第二按钮的电源,使得能够在进行待加工夹持时不触发第二电动伸缩杆,保证了机械臂机构在进行不同夹持任务时的稳定性,避免发生错乱的情况。
17、(4)、该数控机床用机械臂,通过在底框的顶部分别安装若干个遮盖,遮盖通过第三弹簧进行加压,使其能够跟随稳定盘进行移动,能够有效将移动槽遮蔽,避免杂质进入底框的内部,对其内部进行了保护。
- 还没有人留言评论。精彩留言会获得点赞!