前悬挂总成三角臂的自动焊接方法及其系统与流程
本申请涉及工业制造领域,且更为具体地,涉及一种前悬挂总成三角臂的自动焊接方法及其系统。
背景技术:
1、三角臂作为汽车悬架系统中最为重要的部件之一,它主要起支撑、传递载荷,控制车轮运动轨迹以及汽车行驶过程中的转向作用。
2、三角臂焊接内容较少,但焊接要求较高。在焊接过程中,不能导致套筒变形,同时要求焊接极限强度和疲劳强度均满足整车需求。焊接电流越高焊接产生应力越大,对疲劳强度产生不利影响;而焊接电流过小不仅引弧困难,而且电弧也不稳定,由于焊接电流过小使热量不够,还会造成焊条的熔滴堆积在表面,使焊缝成形不美观。也就是说,在前悬挂总成三角臂焊接过程中,焊接电流的选择是一个重要的技术问题。
3、因此,期待一种优化的前悬挂总成三角臂的焊接方案。
技术实现思路
1、为了解决上述技术问题,提出了本申请。本申请的实施例提供了一种前悬挂总成三角臂的自动焊接方法及其系统,其通过采用基于深度学习的人工智能技术从焊接视频中挖掘出焊接过程前悬挂总成三角臂中的动态时序特征,进一步将其进行分类来实现对前悬挂总成三角臂的焊接电流的实时监测和调节,进而提高焊接质量和效率。
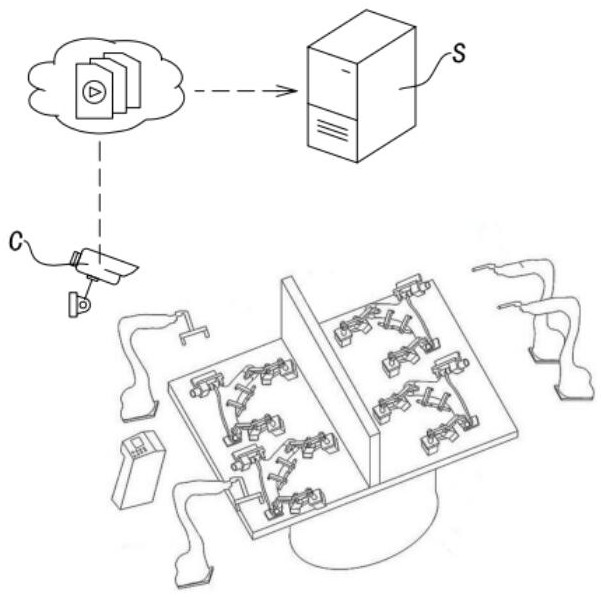
2、根据本申请的一个方面,提供了一种前悬挂总成三角臂的自动焊接方法,其包括:获取预定时间段内的焊接视频;从所述焊接视频中提取多个焊接关键帧;将所述多个焊接关键帧分别通过使用空间注意力机制的卷积神经网络模型以得到多个焊接特征矩阵;将所述多个焊接特征矩阵级联为三维输入张量后通过基于三维卷积核的时序特征提取器以得到焊接时序特征图;以及将所述焊接时序特征图通过分类器以得到分类结果,所述分类结果用于表示当前时间点焊接电流应增大、应减小还是不变。
3、在上述前悬挂总成三角臂的自动焊接方法中,从所述焊接视频中提取多个焊接关键帧,包括:以预定采样频率对所述焊接视频进行采样处理以得到所述多个发酵液监控关键帧。
4、在上述前悬挂总成三角臂的自动焊接方法中,将所述多个焊接关键帧分别通过使用空间注意力机制的卷积神经网络模型以得到多个焊接特征矩阵,包括:使用所述卷积神经网络模型的各层在层的正向传递中分别对所述焊接关键帧进行卷积处理、池化处理和非线性激活处理以由所述卷积神经网络模型的最后一层输出多个初始焊接特征矩阵;以及,将所述多个焊接特征矩阵输入所述卷积神经网络模型的空间注意力层以得到所述多个焊接特征矩阵。
5、在上述前悬挂总成三角臂的自动焊接方法中,将所述多个焊接特征矩阵级联为三维输入张量后通过基于三维卷积核的时序特征提取器以得到焊接时序特征图,包括:使用所述基于三维卷积核的时序特征提取器的各层在层的正向传递中分别对输入数据进行:对输入数据进行卷积处理以得到卷积特征图;对所述卷积特征图进行基于局部特征矩阵的池化以得到池化特征图;以及,对所述池化特征图进行非线性激活以得到激活特征图;其中,所述基于三维卷积核的时序特征提取器的最后一层的输出为所述焊接时序特征图,所述基于三维卷积核的时序特征提取器的第一层的输入为所述多个焊接特征矩阵级联得到的三维输入张量。
6、在上述前悬挂总成三角臂的自动焊接方法中,将所述焊接时序特征图通过分类器以得到分类结果,所述分类结果用于表示当前时间点焊接电流应增大、应减小还是不变,包括:将所述焊接时序特征图基于行向量或列向量展开为分类特征向量;使用所述分类器的多个全连接层对所述分类特征向量进行全连接编码以得到编码分类特征向量;以及,将所述编码分类特征向量通过所述分类器的softmax分类函数以得到所述分类结果。
7、在上述前悬挂总成三角臂的自动焊接方法中,还包括训练步骤:对所述使用空间注意力机制的卷积神经网络模型、所述基于三维卷积核的时序特征提取器和所述分类器进行训练。
8、在上述前悬挂总成三角臂的自动焊接方法中,所述训练步骤,包括:获取训练数据,所述训练数据包括:预定时间段内的训练焊接视频,以及,当前时间点焊接电流应增大、应减小还是不变的真实值;从所述训练焊接视频中提取多个训练焊接关键帧;将所述多个训练焊接关键帧分别通过所述使用空间注意力机制的卷积神经网络模型以得到多个训练焊接特征矩阵;将所述多个训练焊接特征矩阵级联为三维输入张量后通过所述基于三维卷积核的时序特征提取器以得到训练焊接时序特征图;对所述训练焊接时序特征图进行基于低廉瓶颈机制堆叠的特征冗余优化以得到优化后焊接时序特征图;将所述优化后焊接时序特征图通过分类器以得到分类损失函数值;以及,基于所述分类损失函数值并通过梯度下降的方向传播来对所述使用空间注意力机制的卷积神经网络模型、所述基于三维卷积核的时序特征提取器和所述分类器进行训练。
9、在上述前悬挂总成三角臂的自动焊接方法中,对所述训练焊接时序特征图进行基于低廉瓶颈机制堆叠的特征冗余优化以得到优化后焊接时序特征图,包括:以如下优化公式对所述训练焊接时序特征图进行基于低廉瓶颈机制堆叠的特征冗余优化以得到优化后焊接时序特征图;其中,所述公式为:,其中表示所述训练焊接时序特征图,表示单层卷积操作,、和分别表示特征图的逐位置相加、相减和相乘,且和为偏置特征图,且其中初始的偏置特征图 和不同,表示所述优化后焊接时序特征图。
10、根据本申请的另一方面,提供了一种前悬挂总成三角臂的自动焊接系统,其包括:获取由摄像头采集的持卡人员的人脸检测图像;焊接视频采集模块,用于获取预定时间段内的焊接视频;采样模块,用于从所述焊接视频中提取多个焊接关键帧;空间增强模块,用于将所述多个焊接关键帧分别通过使用空间注意力机制的卷积神经网络模型以得到多个焊接特征矩阵;焊接时序特征提取模块,用于将所述多个焊接特征矩阵级联为三维输入张量后通过基于三维卷积核的时序特征提取器以得到焊接时序特征图;以及分类结果生成模块,用于将所述焊接时序特征图通过分类器以得到分类结果,所述分类结果用于表示当前时间点焊接电流应增大、应减小还是不变。
11、根据本申请的再一方面,提供了一种电子设备,包括:处理器;以及,存储器,在所述存储器中存储有计算机程序指令,所述计算机程序指令在被所述处理器运行时使得所述处理器执行如上所述的前悬挂总成三角臂的自动焊接方法。
12、根据本申请的又一方面,提供了一种计算机可读介质,其上存储有计算机程序指令,所述计算机程序指令在被处理器运行时使得所述处理器执行如上所述的前悬挂总成三角臂的自动焊接方法。
13、与现有技术相比,本申请提供的一种城市一卡通身份识别系统及其方法,其通过采用基于深度学习的人工智能技术从焊接视频中挖掘出焊接过程前悬挂总成三角臂中的动态时序特征,进一步将其进行分类来实现对前悬挂总成三角臂的焊接电流的实时监测和调节,进而提高焊接质量和效率。
技术特征:
1.一种前悬挂总成三角臂的自动焊接方法,其特征在于,包括:获取预定时间段内的焊接视频;从所述焊接视频中提取多个焊接关键帧;将所述多个焊接关键帧分别通过使用空间注意力机制的卷积神经网络模型以得到多个焊接特征矩阵;将所述多个焊接特征矩阵级联为三维输入张量后通过基于三维卷积核的时序特征提取器以得到焊接时序特征图;以及将所述焊接时序特征图通过分类器以得到分类结果,所述分类结果用于表示当前时间点焊接电流应增大、应减小还是不变。
2.根据权利要求1所述的前悬挂总成三角臂的自动焊接方法,其特征在于,从所述焊接视频中提取多个焊接关键帧,包括:以预定采样频率对所述焊接视频进行采样处理以得到所述多个发酵液监控关键帧。
3.根据权利要求2所述的前悬挂总成三角臂的自动焊接方法,其特征在于,将所述多个焊接关键帧分别通过使用空间注意力机制的卷积神经网络模型以得到多个焊接特征矩阵,包括:使用所述卷积神经网络模型的各层在层的正向传递中分别对所述焊接关键帧进行卷积处理、池化处理和非线性激活处理以由所述卷积神经网络模型的最后一层输出多个初始焊接特征矩阵;以及将所述多个焊接特征矩阵输入所述卷积神经网络模型的空间注意力层以得到所述多个焊接特征矩阵。
4.根据权利要求3所述的前悬挂总成三角臂的自动焊接方法,其特征在于,将所述多个焊接特征矩阵级联为三维输入张量后通过基于三维卷积核的时序特征提取器以得到焊接时序特征图,包括:使用所述基于三维卷积核的时序特征提取器的各层在层的正向传递中分别对输入数据进行:对输入数据进行卷积处理以得到卷积特征图;对所述卷积特征图进行基于局部特征矩阵的池化以得到池化特征图;以及对所述池化特征图进行非线性激活以得到激活特征图;其中,所述基于三维卷积核的时序特征提取器的最后一层的输出为所述焊接时序特征图,所述基于三维卷积核的时序特征提取器的第一层的输入为所述多个焊接特征矩阵级联得到的三维输入张量。
5.根据权利要求4所述的前悬挂总成三角臂的自动焊接方法,其特征在于,将所述焊接时序特征图通过分类器以得到分类结果,所述分类结果用于表示当前时间点焊接电流应增大、应减小还是不变,包括:将所述焊接时序特征图基于行向量或列向量展开为分类特征向量;使用所述分类器的多个全连接层对所述分类特征向量进行全连接编码以得到编码分类特征向量;以及将所述编码分类特征向量通过所述分类器的softmax分类函数以得到所述分类结果。
6.根据权利要求5所述的前悬挂总成三角臂的自动焊接方法,其特征在于,还包括训练步骤:对所述使用空间注意力机制的卷积神经网络模型、所述基于三维卷积核的时序特征提取器和所述分类器进行训练。
7.根据权利要求6所述的前悬挂总成三角臂的自动焊接方法,其特征在于,所述训练步骤,包括:获取训练数据,所述训练数据包括:预定时间段内的训练焊接视频,以及,当前时间点焊接电流应增大、应减小还是不变的真实值;从所述训练焊接视频中提取多个训练焊接关键帧;将所述多个训练焊接关键帧分别通过所述使用空间注意力机制的卷积神经网络模型以得到多个训练焊接特征矩阵;将所述多个训练焊接特征矩阵级联为三维输入张量后通过所述基于三维卷积核的时序特征提取器以得到训练焊接时序特征图;对所述训练焊接时序特征图进行基于低廉瓶颈机制堆叠的特征冗余优化以得到优化后焊接时序特征图;将所述优化后焊接时序特征图通过分类器以得到分类损失函数值;以及基于所述分类损失函数值并通过梯度下降的方向传播来对所述使用空间注意力机制的卷积神经网络模型、所述基于三维卷积核的时序特征提取器和所述分类器进行训练。
8.根据权利要求7所述的前悬挂总成三角臂的自动焊接方法,其特征在于,对所述训练焊接时序特征图进行基于低廉瓶颈机制堆叠的特征冗余优化以得到优化后焊接时序特征图,包括:以如下优化公式对所述训练焊接时序特征图进行基于低廉瓶颈机制堆叠的特征冗余优化以得到优化后焊接时序特征图;其中,所述公式为:,其中表示所述训练焊接时序特征图,表示单层卷积操作,、和分别表示特征图的逐位置相加、相减和相乘,且和为偏置特征图,且其中初始的偏置特征图 和不同,表示所述优化后焊接时序特征图。
9.一种前悬挂总成三角臂的自动焊接系统,其特征在于,包括:焊接视频采集模块,用于获取预定时间段内的焊接视频;采样模块,用于从所述焊接视频中提取多个焊接关键帧;空间增强模块,用于将所述多个焊接关键帧分别通过使用空间注意力机制的卷积神经网络模型以得到多个焊接特征矩阵;焊接时序特征提取模块,用于将所述多个焊接特征矩阵级联为三维输入张量后通过基于三维卷积核的时序特征提取器以得到焊接时序特征图;以及分类结果生成模块,用于将所述焊接时序特征图通过分类器以得到分类结果,所述分类结果用于表示当前时间点焊接电流应增大、应减小还是不变。
10.根据权利要求9所述的一种前悬挂总成三角臂的自动焊接系统,其特征在于,所述分类结果生成模块,用于:将所述焊接时序特征图基于行向量或列向量展开为分类特征向量;使用所述分类器的多个全连接层对所述分类特征向量进行全连接编码以得到编码分类特征向量;以及将所述编码分类特征向量通过所述分类器的softmax分类函数以得到所述分类结果。
技术总结
本申请涉及工业制造领域,其具体地公开了一种前悬挂总成三角臂的自动焊接方法及其系统,其通过采用基于深度学习的人工智能技术从焊接视频中挖掘出焊接过程前悬挂总成三角臂中的动态时序特征,进一步将其进行分类来实现对前悬挂总成三角臂的焊接电流的实时监测和调节,进而提高焊接质量和效率。
技术研发人员:倪孟飞,倪敏
受保护的技术使用者:台州嘉州机械股份有限公司
技术研发日:
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!