一种钢轨焊缝智能校直机的制作方法
本技术涉及钢轨校直设备领域,尤其涉及一种钢轨焊缝智能校直机。
背景技术:
1、近年来,随着动车、高铁等高速轨道运输工具的不断提速,为了保证列车高速运行的安全性和舒适性,对于钢轨的平直度要求越来越高。现有的钢轨在制作时,通常是在焊轨基地将多段100米的标准钢轨依次焊成长钢轨,再将长钢轨运输到铺设现场、于现场将长钢轨焊接成一体的无缝钢轨线。钢轨焊接时焊缝处容易出现弯曲现象,因此需要在钢轨焊接后对钢轨焊缝处进行校直。
2、目前相关技术公开了一种校直机,包括设备机架、用于测量钢轨平直度的激光测量系统以及用于对钢轨弯曲位置进行校直的校直施力系统;其中,激光测量系统包括水平滑移设置于设备机架的行走单元以及安装于行走单元的激光传感器,而校直施力系统包括校直油缸以及固定于校直油缸活动端的施力柱。校直机工作时,行走单元沿着钢轨的长度方向行走、对整根钢轨进行测量后,将测量信息传送至设备机架内部的信息处理模块,可以反馈信号至校直施力单元使之移动到弯曲位置,然后控制校直油缸动作带动施力柱抵紧于钢轨侧面,可以对钢轨进行压弯校直。
3、行走单元对沿着钢轨的长度方向行走时,由于校直油缸处于行走单元的移动路径上,行走单元移动过程中可能与施力柱发生撞击,因此施力柱通常转动连接于校直油缸的活动端,并通过转动电机驱使施力柱转动,从而便于在行走单元行走时进行避让;然而,当行走单元移动至施力柱正下方、校直机出现断电情况时,转动电机作用于施力柱的保持力消失,施力柱受自身重力作用会向下摆动并与行走单元发生撞击,可能使行走单元出现位置偏移甚至损坏,影响后续激光测量系统的正常使用。
技术实现思路
1、为了在出现断电情况时降低施力柱与行走单元发生撞击的可能性,本技术提供了一种钢轨焊缝智能校直机。
2、本技术提供的一种钢轨焊缝智能校直机采用如下技术方案:
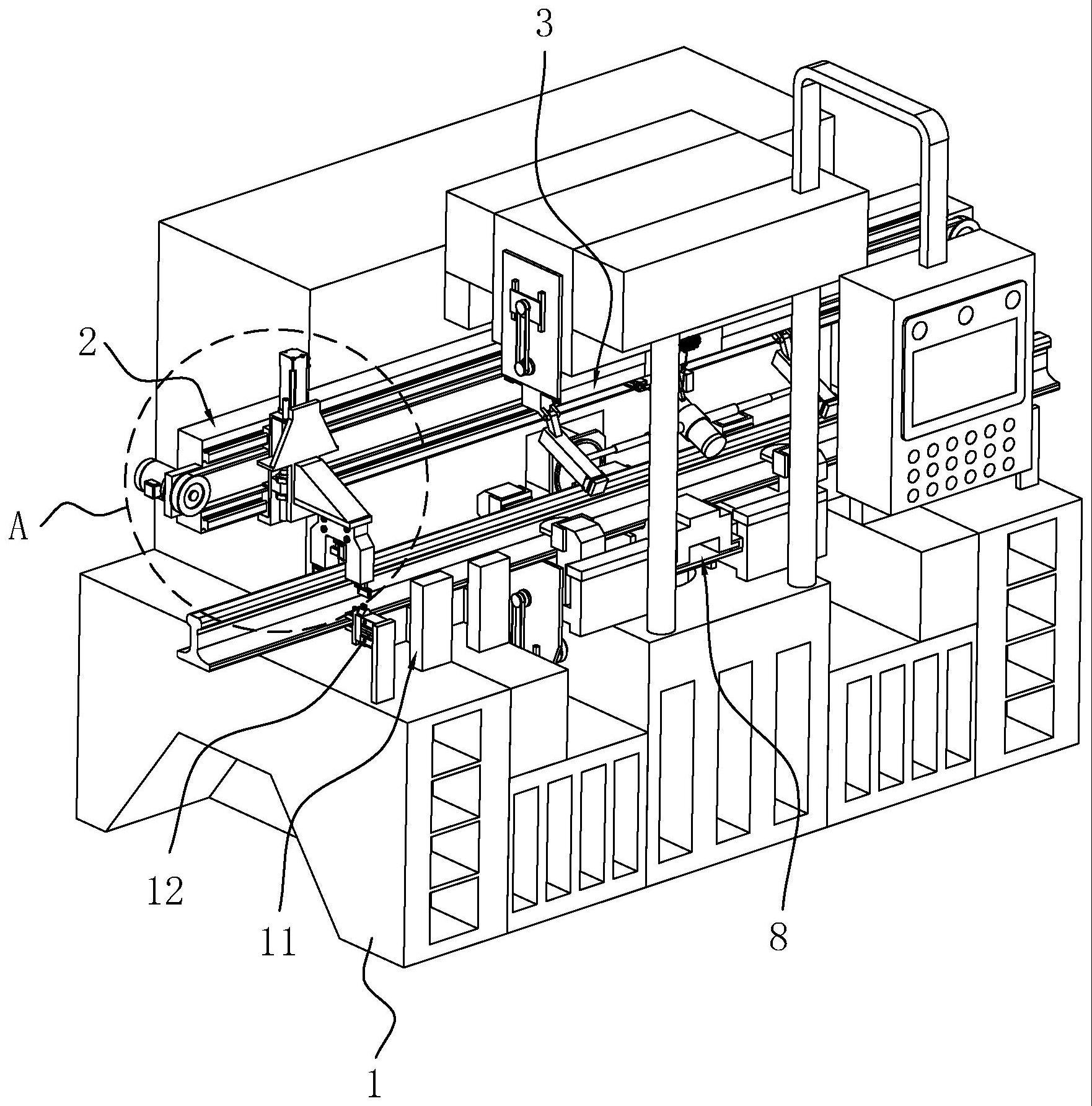
3、一种钢轨焊缝智能校直机,包括设备机架、激光测量系统与校直施力系统,激光测量系统包括水平滑动设置于设备机架的行走单元以及用于驱使行走单元移动的传动机构,行走单元安装有用于测量钢轨平直度的激光传感组件;
4、校直施力系统包括位于行走单元移动路径的上移动单元,上移动单元包括竖向滑动设置于设备机架的上移动平台以及固定于上移动平台的第一垂直施力机构;其中,第一垂直施力机构包括第一油缸和施力柱,第一油缸固定于上移动平台,施力柱通过旋转机构可转动连接于第一油缸的活动端;
5、旋转机构外侧设有摆动块,摆动块的一端转动架设于上移动平台;摆动块的自由端设有限位凸部,施力柱外侧面设有与限位凸部插接适配的限位凹槽,当施力柱处于向上转动状态时,限位凸部匹配卡设于限位凹槽内部;摆动块外侧还设有用于迫使限位凸部脱离限位凹槽的解锁机构。
6、通过采用上述的技术方案,本技术中的传动机构迫使行走单元沿着钢轨的长度方向行走、测量钢轨的平直度时,通过旋转机构控制施力柱向外转动,可以使施力柱避让开行走单元;施力柱向外转动的过程中逐渐抵于摆动块并推动摆动块向上转动,当摆动块转动至限位凸部正对于限位凹槽的位置时,摆动块所受的重力迫使限位凸部自动卡入限位凹槽内部,进而使施力柱的位置得以保持;在遇到意外断电情况、旋转机构的保持力丧失时,施力柱仍停留于原来位置,极大降低施力柱与行走单元发生撞击的可能,减少行走单元出现位置偏移甚至损坏的情况。
7、当激光测量系统测量完成后,通过解锁机构迫使限位凸部脱离限位凹槽,旋转机构复位可以使施力柱回到与第一油缸活动端同轴的位置,通过程序控制钢轨输送进给、使钢轨的向上弯曲位置移动至第一垂直施力机构正下方后,通过第一油缸动作可以使施力柱抵紧于钢轨,进而对钢轨向上弯曲的位置进行校直。
8、可选的,第一油缸的活动端固定有安装座,旋转机构包括转动连接于安装座的齿轮以及水平滑动设置于安装座的移动齿条,齿轮与移动齿条之间相互啮合;齿轮通过连接轴连接于施力柱,而移动齿条连接有使之移动的第一气缸。
9、通过采用上述的技术方案,通过第一气缸动作以带动移动齿条移动,可以使与移动齿条相啮合的齿轮转动,进而带动施力柱向外转动或向内复位,操作便捷且稳定性好;施力柱向外转动后可以与摆动块匹配卡接限位。
10、可选的,旋转机构还包括固定于安装座的第二气缸,第一气缸固定于第二气缸的活动端;第二气缸处于常态伸出状态,使齿轮与移动齿条之间保持啮合;施力柱与安装座之间还设有弹性件,弹性件用于迫使施力柱向靠近安装座的方向转动。
11、通过采用上述的技术方案,当第一气缸动作带动移动齿条转动、施力柱向上翻转与摆动块卡接限位后,通过控制第二气缸动作使移动齿条脱离齿轮,第一气缸可以带动移动齿条快速复位;而后解锁机构动作使限位凸部脱离限位卡槽后,施力柱能够在弹性件的弹力作用下快速复位、重新回到与第一油缸活动端同轴的位置,第二气缸复位可以使移动齿条重新与齿轮抵紧啮合,以便于下次施力柱的翻转。整个过程中施力柱的复位快速便捷,有利于缩短该校直机的工作节拍,提高生产效率。
12、可选的,上移动平台固定有转动架,摆动块通过转轴转动连接于转动架;转轴远离摆动块的一端固定有外露于转动架的承力部;解锁机构包括固定于上移动平台的第三气缸以及固定于第三气缸活动端的抵接块,抵接块始终朝向承力部,当第三气缸动作时,抵接块抵于承力部并迫使摆动块向远离施力柱的方向转动。
13、通过采用上述的技术方案,当摆动块的限位凸部卡设于施力柱的限位凹槽时,通过控制第三气缸动作使抵接块抵靠于承力部,能够带动承力部及抵接块向远离施力柱的方向转动,进而能够方便地使摆动块与施力柱相分离,以便于施力柱回到与第一油缸活动端同轴的位置。
14、可选的,限位凹槽内壁设有卡接槽,限位凸部的侧面活动嵌设有卡接块,当限位凸部匹配卡设于限位凹槽时,卡接块位于限位凸部底部,且卡接块与卡接槽正对设置;卡接块的外侧连接有拉绳,拉绳远离卡接块的一端连接有收卷电机,收卷电机常态保持收卷状态,使卡接块完全缩入限位凸部内部。
15、通过采用上述的技术方案,当遇到意外断电的情况时,收卷电机处于松弛状态、失去对拉绳及卡接块的拉力,此时卡接块受重力作用能够自然下滑进入卡接槽内部,从而进一步提高摆动块对施力柱的固定效果,降低施力柱与行走单元发生撞击的可能性。
16、可选的,上移动单元还包括两组竖向支撑机构,两组竖向支撑机构分别位于第一垂直施力机构的两相对侧;其中,竖向支撑机构包括滑动安装于上移动平台的移动座以及转动连接于移动座的支撑柱,移动座连接有使之移动的第一驱动机构;支撑柱和移动座之间的旋转轴线、施力柱和第一油缸活动端之间的旋转轴线相重合;施力柱与支撑柱之间还设有联动机构,用于使支撑柱跟随施力柱共同转动。
17、通过采用上述的技术方案,激光测量系统进行钢轨的平直度测量时,支撑柱也位于行走单元的移动路径上,通过旋转机构使施力柱向上翻转避让行走单元时,支撑柱可以通过联动机构跟随施力柱共同转动,进而快速完成施力柱及两根支撑柱的翻转,快速便捷地进行行走单元的避让,操作方便且快捷。
18、另外,在激光测量系统测量完成、计算出对钢轨校直时的最佳支点位置后,通过第一驱动机构以驱使移动座移动至最佳支点位置,控制上移动平台向下移动、带动支撑柱抵紧于钢轨,两个支撑柱分别对钢轨进行施力支撑;然后控制第一油缸动作以迫使施力柱抵紧于钢轨,第一油缸继续推动施力柱向下移动,可以对钢轨的向上弯曲处进行压弯校直。通过三点校直的方式可以快速完成钢轨的校直作业,具有高效便捷及自动化的优点。
19、可选的,联动机构包括活动套设于施力柱的活动套筒以及固定于活动套筒外侧面的两组伸缩组件,伸缩组件远离活动套筒的一端连接于支撑柱;其中,伸缩组件包括由内至外依次套设的多个空心套管,空心套管的内周面设有限位环,每一限位环的内径均与内侧相邻的空心套管的外径相适配;空心套管的外周面设有防脱环,每一防脱环的外径均与外侧相邻的空心套管的内径相适配;限位环与防脱环分别位于空心套管的两端。
20、通过采用上述的技术方案,当第一驱动机构驱使移动座水平移动时,移动座能够带动伸缩组件展开/收拢,且相邻空心套管之间通过限位环与防脱环的配合保持套设状态;活动套筒始终活动套设于施力柱,在第一油缸推动施力柱移动时,活动套筒能够与施力柱发生相对滑移,有利于施力柱正常对钢轨进行校直。另外,在旋转机构带动施力柱向上翻转时,施力柱能够抵靠于活动套筒、通过伸缩组件带动支撑柱一起转动,进而快速完成施力柱及两根支撑柱的翻转避让。
21、可选的,校直施力系统还包括下移动单元,下移动单元包括下移动平台、第二垂直施力机构和水平施力机构;其中,下移动平台竖向滑动设置于设备机架,第二垂直施力机构包括固定于下移动平台的第二油缸以及固定于第二油缸活动端的升降台,升降台活动连接于下移动平台;
22、水平施力机构包括滑移安装于升降台的校直基座以及用于驱使校直基座移动的第三油缸,校直基座设有用于容纳钢轨的第一容纳区域,第一容纳区域的两内侧壁分别固定有用于对钢轨腹部施力的施力块。
23、通过采用上述的技术方案,钢轨固定于校直机后,使下移动平台向上移动,钢轨进入校直基座的第一容纳区域内并抵靠于第一容纳区域内底壁;当钢轨出现局部向下弯曲的情况时,通过第二油缸动作推动升降台和校直基座上升,可以对钢轨进行竖向方向的校直。当钢轨出现水平方向的局部弯曲时,通过控制第三油缸动作以迫使校直基座水平移动,校直基座内侧壁的施力块能够作用于钢轨腹部,进而对钢轨进行水平方向的校直。
24、可选的,下移动单元还包括两组双向支撑机构,两组双向支撑机构分别位于水平施力机构的两相对侧;其中,双向支撑机构包括支撑座和两个导向块,支撑座滑移安装于下移动平台,且支撑座连接有使之移动的第二驱动机构;支撑座设有用于容纳钢轨的第二容纳区域,两个导向块分别安装于第二容纳区域的两内侧壁。
25、通过采用上述的技术方案,钢轨固定于校直机后,使下移动平台向上移动,钢轨进入支撑座的第二容纳区域内,且钢轨的底部抵靠于第二容纳区域内底壁;校直时,通过竖向支撑机构与支撑座之间的共同支撑,可以形成供垂直施力校直的支点;两个导向块分别抵靠于钢轨的两相对侧,可以形成供水平施力校直的支点,以三点校直的方式对钢轨进行校直。
26、可选的,行走单元包括滑动连接于设备机架的平移基座、竖向滑动设置于平移基座的升降基座以及用于驱使升降基座移动的线性模组,传动机构连接于平移基座,用于驱使平移基座移动;
27、升降基座固定有安装架,安装架设于用于容纳钢轨的第三容纳区域;激光传感组件包括顶面激光位移传感器与两个侧面激光位移传感器,顶面激光位移传感器安装于第三容纳区域内部,两个侧面激光位移传感器均固定于安装架底部,且分别位于第三容纳区域两相对侧。
28、通过采用上述的技术方案,本技术的线性模组驱动升降基座和安装架向下移动,钢轨能够进入安装架的第三容纳区域内,通过控制传动机构驱使行走单元沿钢轨的长度方向移动,顶面激光位移传感器能够测量整根钢轨顶面的平直度,而侧面激光位移传感器能够测量钢轨两个侧面的平直度,进而快速确定出钢轨所需校直的位置。
29、综上所述,本技术包括以下至少一种有益技术效果:
30、1.施力柱向上翻转后通过限位凸部与限位凹槽的配合与摆动块匹配卡接,能够在遇到意外断电情况时使施力柱保持原位,降低降低施力柱与行走单元发生撞击的可能,减少行走单元出现位置偏移甚至损坏的情况;
31、2.通过收卷电机收卷拉绳及卡接块,当遇到意外断电情况时,收卷电机松弛、失去对拉绳及卡接块的拉力,卡接块受重力作用能够自然下滑进入卡接槽,从而进一步提高摆动块对施力柱的限位效果,降低施力柱与行走单元发生撞击的可能性;
32、3.通过联动组件使支撑柱跟随施力柱共同转动,可以快速完成施力柱及两根支撑柱的翻转,快速便捷地进行行走单元的避让,操作方便且快捷。
- 还没有人留言评论。精彩留言会获得点赞!