集成夹爪机构的制作方法
本发明属于机械,具体涉及一种集成夹爪机构。
背景技术:
1、大型滚子生产时,工件需要放置机床加工工位加工后再取出,目前多由人工来完成此操作。即便采用了专用搬运机械对滚子进行搬运,也需要机械臂先将加工位上的滚子取下,然后再抓取未加工的滚子放到工位上,这个过程效率较低,加工机器等待滚子放入加工位的时间较长,不利于提高加工效率。
2、另外,对于不同大小的滚子,当直径差异较大时,往往需要更换夹具,才能较为稳定的夹住滚子,这也会降低生产效率;尤其在应对一条产线上有多个型号的滚子需要加工时,由于无法快速更换夹具,所以普通的搬运机械装置也无法胜任此加工需求,仍需人工搬运。
技术实现思路
1、本发明的目的是提供一种用于替代人工抓取和搬运滚子的多功能装置。
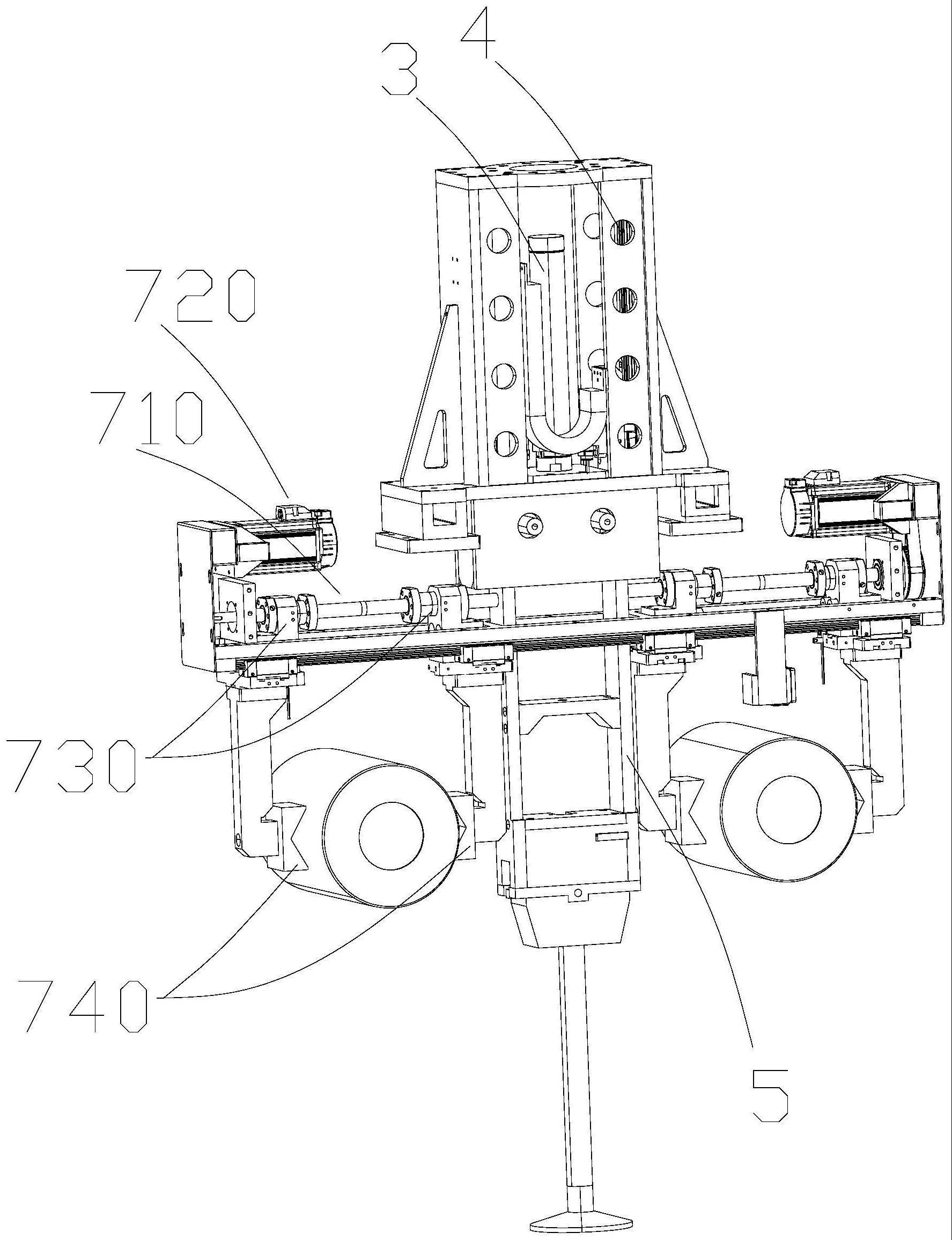
2、为了解决上述技术问题,本发明公开了一种集成夹爪机构,包括呈倒t型的支架,支架包括竖架和横架,竖架的内腔中设有用于控制横架高度的升降组件;所述升降组件包括升降气缸、轨道和滑板,轨道包括一对沿竖向固定于竖架内腔两侧的轨道板,滑板沿轨道滑动,滑板与升降气缸的活动端连接,滑板下部与横架连接;
3、所述横架上设有两组独立工作的滚子抓取装置,包括第一滚子抓取装置和第二滚子抓取装置;两组滚子抓取装置分设于竖架两侧;每个滚子抓取装置包括一个沿横架长度方向设置的滚珠丝杆和驱动滚珠丝杆转动的驱动器,滚珠丝杆上设有一对滑块,每个滑块下端设有一个夹爪,两个夹爪相对设置;滚珠丝杆正向转动时,两个夹爪相互靠近,将滚子夹住,滚珠丝杆反向转动时,两个夹爪相互远离,将滚子释放;所述竖架上端连接有旋转装置;
4、工作时,第一滚子抓取装置抓取未加工滚子待用,待工位上滚子加工完毕后,第二滚子抓取装置抓取加工完成的滚子,随后旋转装置带动横架旋转180°,第一滚子抓取装置释放未加工滚子至工位上,第二滚子抓取装置将加工完成的滚子放入指定回收位置。
5、优选地,所述滚珠丝杆一端与滑板可转动的连接;滑板下端穿过横架,滑板下端设有带吸盘的第三滚子抓取装置;所述升降气缸控制滑板升降,从而实现对第一至第三滚子抓取装置高度的控制。
6、优选地,所述夹爪上方的横架上设有用于识别滚子型号的摄像头。
7、优选地,所述夹爪的内侧面为夹持面,夹持面为由上夹持面和下夹持面构成的v型端面,上夹持面和下夹持面间的夹角为120-160°。
8、优选地,所述夹持面上还设有长度大于下夹持面的活动板,活动板一端与v型端面的底部铰接,活动板向上翻转时与上夹持面贴合固定,活动板向下翻转时与下夹持面贴合;夹爪用于夹持较小的滚子时,将活动板贴上夹持面固定;夹爪用于夹持较大的滚子时,将活动板贴下夹持面固定。
9、优选地,所述上夹持面上设有用于吸附固定活动板的强磁体,活动板采用铁磁性金属。
10、优选地,所述夹爪侧面设有用于驱动活动板翻转的驱动装置,活动板近驱动装置一侧设有传动件,驱动装置与传动件连接从而控制活动板停靠在上夹持面或下夹持面上。
11、优选地,所述活动板为v型板,包括第一夹持边和第二夹持边,第一夹持边和第二夹持边呈140-180°夹角,活动板贴下夹持面固定时,第一夹持边和第二夹持边的夹角朝上。
12、优选地,所述活动板为弧型板,活动板贴下夹持面固定时,活动板的凹面朝上。
13、优选地,所述活动板端部设有滚轮或棱角处做圆角化处理。
14、本发明的集成夹爪机构,具有两个滚子抓取装置,可以携带待加工滚子,抓取已加工的滚子后旋转180°将待加工滚子放置工位上,大大缩短了加工产线的等待间隔,提高了生产效率;通过设置第三滚子抓取装置,对于第一、二滚子抓取装置不方便抓取的滚子,采用带吸盘的第三滚子抓取装置来完成,使用场景广泛;通过设置活动板,活动板与上夹持面贴合固定时,可夹持较小的滚子,活动板与下夹持面固定时,可夹持较大的滚子,活动板可在驱动装置的控制下迅速完成切换,实现对不同滚子的抓取任务,无需更换夹具,能够适应不同大小滚子同时加工的任务。
技术特征:
1.一种集成夹爪机构,其特征在于,包括呈倒t型的支架,支架包括竖架和横架,竖架的内腔中设有用于控制横架高度的升降组件;所述升降组件包括升降气缸、轨道和滑板,轨道包括一对沿竖向固定于竖架内腔两侧的轨道板,滑板沿轨道滑动,滑板与升降气缸的活动端连接,滑板下部与横架连接;
2.根据权利要求1所述的集成夹爪机构,其特征在于,所述滚珠丝杆一端与滑板可转动的连接;滑板下端穿过横架,滑板下端设有带吸盘的第三滚子抓取装置;所述升降气缸控制滑板升降,从而实现对第一至第三滚子抓取装置高度的控制。
3.根据权利要求1所述的集成夹爪机构,其特征在于,所述夹爪上方的横架上设有用于识别滚子型号的摄像头。
4.根据权利要求1所述的集成夹爪机构,其特征在于,所述夹爪的内侧面为夹持面,夹持面为由上夹持面和下夹持面构成的v型端面,上夹持面和下夹持面间的夹角为120-160°。
5.根据权利要求4所述的集成夹爪机构,其特征在于,所述夹持面上还设有长度大于下夹持面的活动板,活动板一端与v型端面的底部铰接,活动板向上翻转时与上夹持面贴合固定,活动板向下翻转时与下夹持面贴合;夹爪用于夹持较小的滚子时,将活动板贴上夹持面固定;夹爪用于夹持较大的滚子时,将活动板贴下夹持面固定。
6.根据权利要求5所述的集成夹爪机构,其特征在于,所述上夹持面上设有用于吸附固定活动板的强磁体,活动板采用铁磁性金属。
7.根据权利要求5所述的集成夹爪机构,其特征在于,所述夹爪侧面设有用于驱动活动板翻转的驱动装置,活动板近驱动装置一侧设有传动件,驱动装置与传动件连接从而控制活动板停靠在上夹持面或下夹持面上。
8.根据权利要求5所述的集成夹爪机构,其特征在于,所述活动板为v型板,包括第一夹持边和第二夹持边,第一夹持边和第二夹持边呈140-180°夹角,活动板贴下夹持面固定时,第一夹持边和第二夹持边的夹角朝上。
9.根据权利要求5所述的集成夹爪机构,其特征在于,所述活动板为弧型板,活动板贴下夹持面固定时,活动板的凹面朝上。
10.根据权利要求8或9所述的集成夹爪机构,其特征在于,所述活动板端部设有滚轮或棱角处做圆角化处理。
技术总结
本发明涉及一种集成夹爪机构,包括呈倒T型的支架,支架包括竖架和横架,竖架的内腔中设有用于控制横架高度的升降组件;所述横架上设有两组独立工作的滚子抓取装置,包括第一滚子抓取装置和第二滚子抓取装置;工作时,第一滚子抓取装置抓取未加工滚子待用,待工位上滚子加工完毕后,第二滚子抓取装置抓取加工完成的滚子,随后旋转装置带动横架旋转180°,第一滚子抓取装置释放未加工滚子至工位上;本发明的集成夹爪机构具有双滚子抓取装置,大大缩短了加工产线的等待间隔,提高了生产效率;通过设置活动板,实现对不同滚子的抓取任务。
技术研发人员:张鹏飞,许滨,吴海涛,顾银山,朱飞
受保护的技术使用者:南通辰同智能科技有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!