一种工件焊接自动化设备及其方法
本发明涉及焊接,具体为一种工件焊接自动化设备及其方法。
背景技术:
1、随着数字化,自动化,计算机,机械设计技术的发展,以及对焊接质量的高度重视,自动焊接已发展成为一种先进的制造技术,自动焊接设备在各工业的应用中所发挥的作用越来越大,应用范围正在迅速扩大;
2、在现代工业生产中,焊接生产过程的机械化和自动化多采用机器人、机械臂进行实现,但是购入成本较高,不适用于个人、小厂、汽修等门店使用,因此现设计一种焊接自动化设备。
技术实现思路
1、本发明的目的在于提供一种工件焊接自动化设备及其方法,以解决上述背景技术中提出的问题。
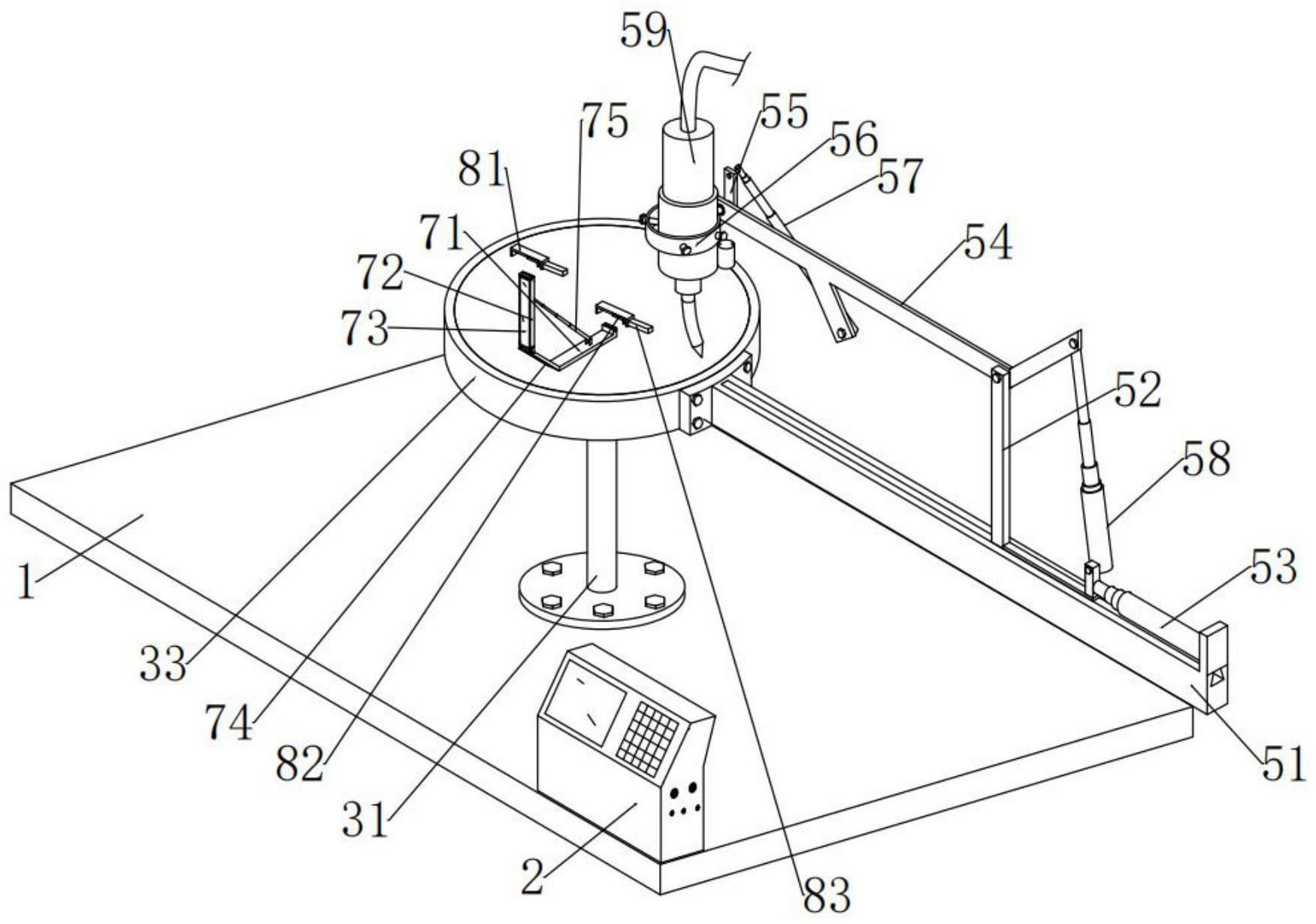
2、为实现上述目的,本发明提供如下技术方案:一种焊接自动化设备,包括基座、焊接控制箱、方向调节结构、限位结构以及对焊结构,所述基座为矩形结构,所述焊接控制箱固定设置于基座右端上壁,且位于靠近前侧,所述焊接控制箱右侧壁设置有若干转接口,所述方向调节结构固定设置于基座上壁,且位于中心部位处,并方向调节结构通过导线与焊接控制箱相连,所述限位结构可拆卸安置于方向调节结构上,且通过导线与焊接控制箱相连,所述对焊结构固定设置于方向调节结构上,且对焊结构通过导线与焊接控制箱相连。
3、优选的,所述方向调节结构包括焊接台、轴承、齿座、电机以及齿轮;
4、所述焊接台两端均为t型圆台结构,所述焊接台一端固定设置于基座上壁,且位于中心部位处,所述轴承固定套装于焊接台靠近另一端上,且轴承外环与焊接台顶端上壁直径相同,所述轴承侧壁与焊接台顶端侧壁相契合,所述齿座为圆环结构,且内侧壁靠近底部圆周开设有齿牙,所述齿座固定套装于轴承外环上,且活动套装于焊接台顶部外侧,所述齿座上壁沿与焊接台上壁在同一平面,所述齿座的齿牙位于轴承下方,所述电机固定嵌装于焊接台靠近顶端下壁内,所述齿轮固定套装于电机驱动端上,且齿轮与齿座内侧壁的齿牙相咬合。
5、优选的,所述限位结构包括若干限位组件,若干所述限位组件分别可拆卸吸附于焊接台上壁上;
6、所述限位组件由角度单元以及夹持单元组成,所述夹持单元可拆卸安置于角度单元上;
7、所述角度单元包括第一角架、第二角架、一对第一磁铁、第二磁铁以及第一电动推杆;
8、所述第一角架为l型结构,且第一角架两端夹角为135度,所述第一角架一端上壁以及右侧壁均开设有第一插槽,所述第二角架活动安置于第一角架另一端上,且第二角架与第一角架一端相垂直,并第二角架与第一角架一端长度相同,所述第二角架另一端上壁以及前侧壁均开设有与第一插槽相同的第二插槽,一对所述第一磁铁分别固定嵌装于第一角架一端内以及第二角架内,所述第二磁铁固定嵌装于第一角架另一端内,所述第一电动推杆一端活动安置于第一角架一端上壁,且另一端倾斜活动连接于第二角架靠近另一端后侧壁上。
9、优选的,所述夹持单元包括夹座、插板以及第二电动推杆;
10、所述夹座为凹型结构,且一端侧壁中部设置有伸缩口,所述插板为t型结构,所述插板固定设置于夹座靠近一端前侧壁沿上,所述第二电动推杆固定设置于夹座一端侧壁,且伸缩端活动贯穿于伸缩口内,所述第二电动推杆伸缩端上设置有推板。
11、优选的,所述对焊结构包括滑臂、翻滑架、第三电动推杆、翻转架、摆动轴、固定环、第四电动推杆、第五电动推杆以及焊枪;
12、所述滑臂一端固定设置于齿座侧壁上,所述滑臂另一端上壁开设有滑槽,所述翻滑架一端活动嵌装于滑臂的滑槽内,且翻滑架靠近一端右侧壁设置有托臂,所述第三电动扞一端固定设置于滑臂另一端上,且第三电动推杆伸缩端活动连接于托臂另一端上,所述翻转架一端为v型结构,且另一端为y型结构,所述翻转架靠近一端活动安置于翻滑架另一端上,所述摆动轴一端活动贯穿于翻转架另一端内,所述固定环固定设置于摆动轴一端上,且位于翻转架前侧,所述摆动环侧壁等距设置有两对紧固螺管,所述第四电动推杆一端活动安置于翻转架另一端的底部上,且第四电动推杆伸缩端倾斜活动连接于摆动轴另一端上,所述第五电动推杆一端活动安置于托臂另一端后侧壁上,且第五电动推杆伸缩端活动连接于翻转架一端上,所述焊枪可拆卸安置于固定环内,且焊枪上设置有红外摄像头。
13、优选的,为了提高焊接点位全面,所述焊枪能够借助固定环翻转调整倾斜角度。
14、优选的,为了实现根据不同需求固定工件,所述夹座能够借助插板可拆卸安置于第一插槽以及第二插槽部位内。
15、所述的一种焊接自动化设备及其方法,包括以下步骤
16、步骤一、通过将设备通电后,借助基座上的焊接控制箱,可控制方向调节结构中的电机驱动,进而即可通过齿轮与齿座内的齿牙相咬合传动,实现带动齿座通过轴承在焊接台上转动,进而实现带动对焊结构转动调整焊枪的方位;
17、步骤二、焊接前,可借助限位结构中的角度单元进行固定工件,通过第一角架一端的第一磁铁吸附在焊接台上进行固定后,即可借助第二角架上的第一磁铁吸附工件进行固定,进而借助多个角度单元可将两个工件相对垂直贴合,也可将第一角架上的第二磁铁吸附在焊接台上,再借助第一磁铁吸附工件,实现两个工件同时相对倾斜45度角限位;
18、步骤三、在对工件固定中,还可根据焊接需求,通过控制第一电动推杆伸缩,带动第二角架在第一角架上翻转一定角度进行调整相对固定角度使用;并且可通过安装夹持单元,通过插板将夹座根据使用方向需求固定在第一角架或者第二夹角上后,通过控制第二电动推杆带动推板将工件夹持在夹座内使用;
19、步骤四、在工件固定好后,即可控制齿座转动调整焊枪方向,并驱动对焊结构中的第三电动推杆,带动翻滑架在滑臂上移动,调整焊枪位于焊接台上的位置实现焊枪可360度广角范围工作;
20、步骤五、在焊接中,可根据工件的高度、焊接走线的角度以及位置,可同时驱动第四电动推杆,可带动摆动轴在翻转架上翻转一定角度实现电动固定环转动,即可调整焊枪的倾斜角度,同时还可驱动第五电动推杆,带动翻转架在翻滑架上翻转,调整焊枪的高度和倾斜角度。
21、本发明提出的一种工件焊接自动化设备及其方法,有益效果在于:
22、1、本发明通过方向调节结构可以实现带动焊枪圆周360度围绕工件转动,加强焊接点位方向;
23、2、本发明,通过对焊结构可以与方向调节结构相配合,可以扩大焊接范围,并接根据焊接需求可调整焊枪高度、角度;并且焊接使用中,可以借助限位结构对工件进行吸附固定、夹持固定、多角度对接;
24、3、本发明,整体构造简单、造价低廉并且操控简易,适用于大众化自动焊接使用。
技术特征:
1.一种工件焊接自动化设备,其特征在于:包括基座(1)、焊接控制箱(2)、方向调节结构(3)、限位结构(4)以及对焊结构(5),所述基座(1)为矩形结构,所述焊接控制箱(2)固定设置于基座(1)右端上壁,且位于靠近前侧,所述焊接控制箱(2)右侧壁设置有若干转接口,所述方向调节结构(3)固定设置于基座(1)上壁,且位于中心部位处,并方向调节结构(3)通过导线与焊接控制箱(2)相连,所述限位结构(4)可拆卸安置于方向调节结构(3)上,且通过导线与焊接控制箱(2)相连,所述对焊结构(5)固定设置于方向调节结构(3)上,且对焊结构(5)通过导线与焊接控制箱(2)相连。
2.根据权利要求1所述的一种工件焊接自动化设备,其特征在于:所述方向调节结构(3)包括焊接台(31)、轴承(32)、齿座(33)、电机(34)以及齿轮(35);
3.根据权利要求2所述的一种工件焊接自动化设备,其特征在于:所述限位结构(4)包括若干限位组件,若干所述限位组件分别可拆卸吸附于焊接台(31)上壁上;
4.根据权利要求3所述的一种工件焊接自动化设备,其特征在于:所述夹持单元(8)包括夹座(81)、插板(82)以及第二电动推杆(83);
5.根据权利要求4所述的一种工件焊接自动化设备,其特征在于:所述对焊结构(5)包括滑臂(51)、翻滑架(52)、第三电动推杆(53)、翻转架(54)、摆动轴(55)、固定环(56)、第四电动推杆(57)、第五电动推杆(58)以及焊枪(59);
6.根据权利要求5所述的一种工件焊接自动化设备,其特征在于:所述焊枪(59)能够借助固定环(56)翻转。
7.根据权利要求6所述的一种工件焊接自动化设备,其特征在于:所述夹座(81)能够借助插板(82)可拆卸安置于第一插槽以及第二插槽部位内。
8.根据权利要求7所述的一种工件焊接自动化设备及其方法,其特征在于:包括以下步骤
技术总结
本发明公开了一种工件焊接自动化设备,包括基座、焊接控制箱、方向调节结构、限位结构以及对焊结构,所述基座为矩形结构,所述焊接控制箱固定设置于基座右端上壁,且位于靠近前侧,所述焊接控制箱右侧壁设置有若干转接口,本发明涉及焊接技术领域,本发明通过方向调节结构可以实现带动焊枪圆周360度围绕工件转动,加强焊接点位方向,通过对焊结构可以与方向调节结构相配合,可以扩大焊接范围,并接根据焊接需求可调整焊枪高度、角度;并且焊接使用中,可以借助限位结构对工件进行吸附固定、夹持固定、多角度对接;整体构造简单、造价低廉并且操控简易,适用于大众化自动焊接使用。
技术研发人员:张保生,葛新锋,姚瑞央,王胜辉,田艳行,秦书祺,许艳华
受保护的技术使用者:许昌职业技术学院
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!