管型构件高效自动化焊接装置
本技术属于焊接装置领域,更具体地,涉及管型构件高效自动化焊接装置。
背景技术:
1、随着陆地油气资源的逐渐减少,海洋油气资源的开发和利用已经愈发受到重视,深水海洋石油平台是开发海洋油气资源的重要依托。深水海洋石油平台结构中的导管架是其主体钢结构,其中导管通常使用厚板卷制再焊接而成,同时为加强导管在深海海况中的承载能力,需要在导管内部焊接加强环或压溃环增加其结构强度,且工艺要求加强环焊接均应采用双面开坡口双面焊接。目前管型构件内加强环与压溃环焊接多采用人工或半自动焊接小车的焊接方式,焊接过程将管型构件竖直放置,完成加强环一侧焊接之后翻转管型构件焊接另一侧,焊接效率低,且工人在管型构件内焊接作业环境恶劣。
2、机器人自动焊接可有效解决上述问题,然而现有的导管在机器人焊接加强环时,通常的方式为:将卷制焊接后的导管水平放置,使用滚轮架支撑,由电机驱动滚轮带动导管旋转,将焊接机器人手臂伸入导管内,导管在转动过程中,焊接机器人对加强环和导管的内壁之间进行焊接。
3、现有相关技术中存在以下问题:滚轮架与导管依靠摩擦传动,容易出现打滑错位的现象,影响焊接的稳定性和焊接质量;同时由于导管外表面存在余高明显的纵向焊缝,当纵向焊缝转动到滚轮架处时,凸起的余高会与滚轮碰撞,使导管发生颠簸,产生的振动会影响导管与加强环的焊接质量。
技术实现思路
1、为了提高导管与加强环之间的焊接精度和焊接效率,本技术提供一种管型构件高效自动化焊接装置。
2、本技术提供的一种管型构件高效自动化焊接装置,采用如下的技术方案:
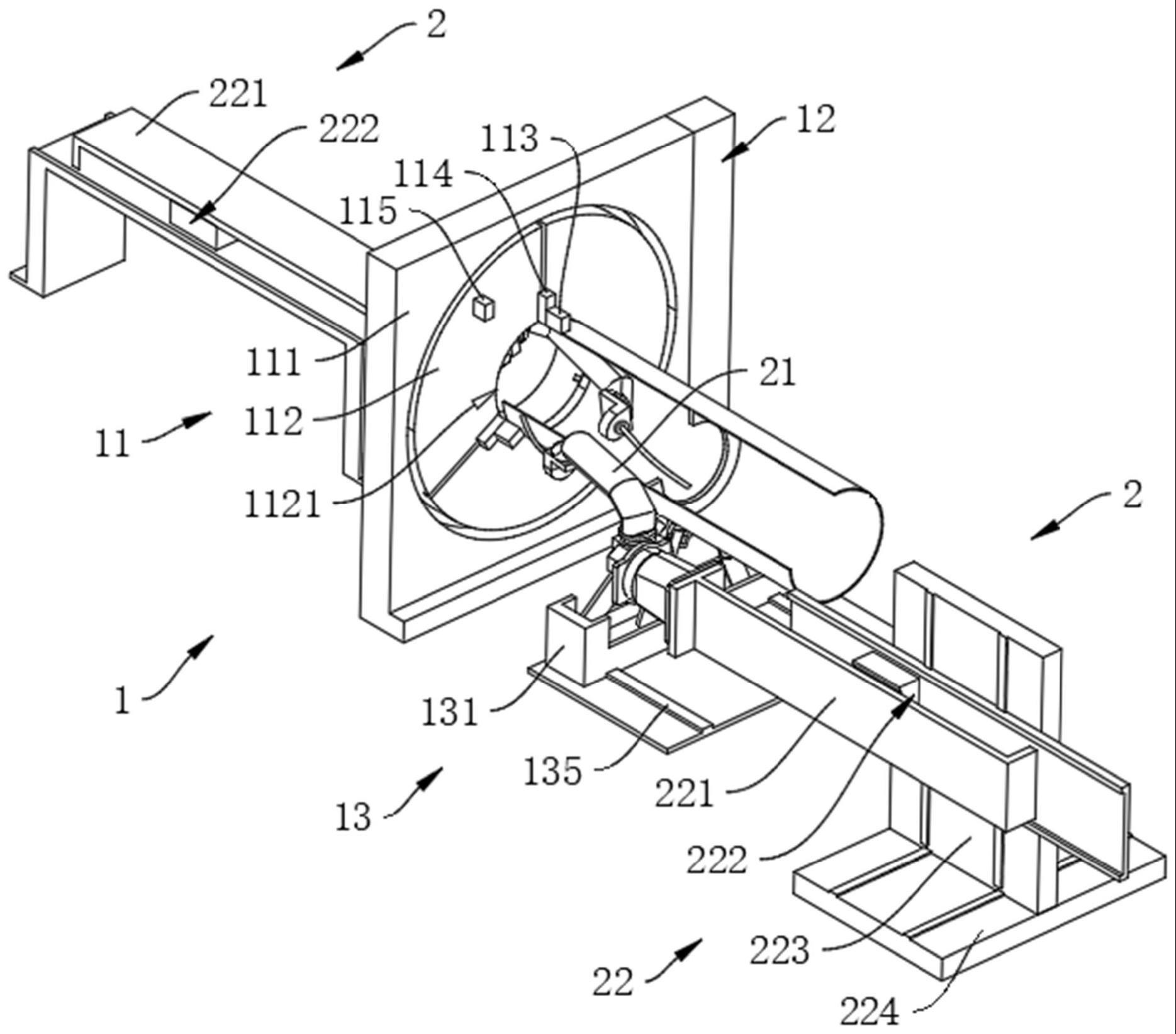
3、一种管型构件高效自动化焊接装置,包括管型构件定位机构和管型构件焊接机构;所述管型构件定位机构包括用于对管型构件的一端进行固定的夹持组件,用于驱动管型构件绕轴线转动的驱动组件,以及用于对管型构件底部进行承托的支撑组件,管型构件转动过程中,支撑组件对管型构件承托的同时避让运动中的纵焊缝;所述管型构件焊接机构包括焊接机器人和用于驱动焊接机器人移动的控制组件。
4、通过采用上述技术方案,在管型构件内焊接加强环时,通过夹持组件对管型构件的一端进行夹持固定,支撑组件对管型构件的底部进行承托,且能够对管型构件上的纵焊缝进行避让,使管型构件的位置更加稳定,通过控制组件使焊接机器人进入管型构件的内部,从而能够对加强环和管型构件之间进行焊接,且驱动组件驱动管型构件发生转动,完成加强环的一周与管型构件内壁的焊接,焊接过程中管型构件位置稳定,从而能够提高管型构件与加强环之间的焊接精度和焊接效率。
5、作为进一步优选的,所述夹持组件包括固定架和设置有多个活动卡爪的自定心卡盘,多个所述活动卡爪环绕设置,所述自定心卡盘转动连接于固定架上,所述自定心卡盘上设置有用于驱动多个活动卡爪相互靠近或远离的第一驱动件,所述驱动组件用于驱动自定心卡盘转动。
6、通过采用上述技术方案,将管型构件的一端放置于自定心卡盘的中部,通过第一驱动件驱动多个活动卡爪运动,使活动卡爪与管型构件的外壁抵接,从而将管型构件固定,再通过第二驱动件驱动自定心卡盘发生转动,从而能够带动管型构件转动,结构简单,操作方便,提高加工效率且工人劳动强度较低。
7、作为进一步优选的,所述支撑组件包括支撑架、多个滚轮和伸缩支架,多个所述伸缩支架均设置于支撑架上,所述滚轮转动连接于对应的伸缩支架上,所述滚轮的转动轴线与管型构件的轴线相平行,所述支撑组件还包括有用于驱动伸缩支架伸缩的第二驱动件,所述第二驱动件设置于支撑架上。
8、通过采用上述技术方案,第二驱动件驱动伸缩支架伸长能够使滚轮与管型构件外壁接触,通过滚轮对管型构件进行支撑,使支撑组件能够适用于不同管径的管型构件,适用性更好。
9、作为进一步优选的,所述第二驱动件包括液压缸和用于检测管型构件焊缝的位移传感器,所述液压缸固定安装于所述支撑架上,所述伸缩支架设置于液压缸的活塞杆上,所述位移传感器设置于所述伸缩支架靠近滚轮的一端且与液压缸电性连接。
10、通过采用上述技术方案,液压缸驱动伸缩支架伸长,从而使滚轮与管型构件的外壁抵接,多个滚轮对管型构件实现支撑,伸缩组件上的位移传感器能够对管型构件外壁上的焊缝进行检测,当管型构件转动使焊缝靠近滚轮时,对应的位移传感器驱使液压缸启动,从而使伸缩支架缩短,滚轮与管型构件的外壁脱离,滚轮避让焊缝后,液压缸使伸缩支架伸长,滚轮与管型构件的外壁接触进行支撑,多个滚轮依次避让管型构件上的焊缝,使管型构件在转动过程中更加稳定,从而在焊接过程中效果更好。
11、作为进一步优选的,所述支撑架的底部设置有固定于地面上的支撑轨道,所述支撑架沿管型构件的轴线方向滑动设置于支撑轨道上。
12、通过采用上述技术方案,支撑架在支撑轨道上滑动,从而调节滚轮对管型构件的支撑位置,能够根据管型构件的长度调节支撑架的位置,使滚轮对管型构件不同的位置进行支撑,提高支撑效果,使管型构件在焊接过程中更加稳定。
13、作为进一步优选的,所述自定心卡盘上设置有卡爪基座,所述活动卡爪与卡爪基座可拆卸连接。
14、通过采用上述技术方案,活动卡爪与卡爪基座之间为可拆卸连接,从而能够对活动卡爪进行拆卸更换,以便于根据管型构件的规格更换为不同型号的活动卡爪,以提高对管型构件的夹持固定的效果。
15、作为进一步优选的,所述自定心卡盘的中部开设有穿孔,所述管型构件焊接机构设置有两组,两组所述管型构件焊接机构分别位于所述固定架的两侧,两组所述管型构件焊接机构能够从管型构件的两端进入进行焊接。
16、通过采用上述技术方案,焊接机器人能够穿过穿孔进入管型构件的内部,从而能够同时从两侧对管型构件和加强环同时进行焊接,提高加强环和管型构件之间的焊接效果且效率更高。
17、作为进一步优选的,所述控制组件包括安装架、推送件和支架本体,所述安装架设置于支架本体上,所述焊接机器人设置于安装架上,所述推送件用于驱动安装架沿管型构件的轴线方向运动。
18、通过采用上述技术方案,推送件驱动在安装架带动焊接机器人运动,使焊接机器人沿管型构件的轴线方向运动,能够实现对管型构件的纵向连接缝进行焊接,且在焊接加强环时,能够准确将焊接机器人输送至合适的位置,以便于对加强环和管型构件之间进行焊接。
19、作为进一步优选的,所述推送件包括驱动电机、丝杆和滑块,所述驱动电机固定安装于所述安装架上,所述丝杆同轴固定连接于驱动电机的输出轴上,所述滑块滑动连接于安装架上,所述滑块与丝杆螺纹连接适配,所述滑块固定设置于所述支架本体上。
20、通过采用上述技术方案,启动驱动电机带动丝杆转动,丝杆转动能够驱动安装架相对滑块运动,从而带动焊接机器人的位置发生变化,且滑块滑动过程中较为稳定,从而提高焊接机器人运动的稳定性,使焊接精度更好。
21、作为进一步优选的,所述支架本体包括抬高件和变位轨道,所述抬高件滑动设置于变位轨道上,所述滑块设置于抬高件的输出端,所述推送件、抬高件和变位轨道配合使所述焊接机器人在空间中移动。
22、通过采用上述技术方案,抬高件在变位轨道上滑动,同时抬高件能够驱动滑块在竖直方向上移动,使得焊接机器人能够移动至管型构件的内侧或外侧,便于使焊接机器人对管型构件外侧连接缝焊接完成后,将其移动至内侧进行焊接连接缝或者焊接加强环。
23、综上所述,本技术包括以下至少有益技术效果:
24、1.在管型构件内焊接加强环时,通过夹持组件对管型构件的一端进行夹持固定,支撑组件对管型构件的底部进行承托,保证工件变位精度,进而保证焊接质量,通过管型构件两侧的控制组件使两台焊接机器人分别进入管型构件的内部,从而实现焊接装置由两侧同时对加强环和管型构件之间进行焊接,且驱动组件驱动管型构件发生转动,完成加强环的一周与管型构件的焊接,焊接过程中管型构件位置稳定,从而能够提高管型构件与加强环之间的焊接精度和焊接效率;
25、2.液压缸驱动伸缩支架伸长,从而使滚轮与管型构件的外壁抵接,多个滚轮对管型构件实现支撑,能够适用于对不同管径的管型构件进行支撑,伸缩组件上的位移传感器能够对管型构件外壁上的余高明显的纵焊缝进行检测,当管型构件转动使焊缝靠近滚轮时,对应的位移传感器驱使液压缸启动,从而使伸缩支架缩短,滚轮与管型构件的外壁脱离,同时其他滚轮继续支撑管型构件,不影响管型构件的稳定性,滚轮避让焊缝后,液压缸使伸缩支架伸长,滚轮与管型构件的外壁接触进行支撑,多个滚轮依次避让管型构件上的焊缝,使管型构件在转动过程中更加稳定,从而在焊接过程中有效避免的纵缝可能引起的管型构件颠簸振动,保证焊接稳定性和质量;
26、3.推送件、抬高件和变位轨道配合使焊接机器人在空间中移动,能够先对卷制后的管型构件外壁和内壁的连接缝进行焊接,焊接完成后再对加强环和管型构件之间进行焊接,使管型构件的加工效率更高。
- 还没有人留言评论。精彩留言会获得点赞!