一种用于机器人焊接的试验定位平台的制作方法
本发明涉及一种机械卡具,特别是一种配合机器人使用的焊接试验定位平台,属于焊接。
背景技术:
1、焊接机器人由于具有生产效率高、焊接质量稳定等优势而被大量应用于焊接生产过程。在焊接生产中,往往设定好机器人焊接路径后对同规格的工件进行批量焊接。而焊接试验过程中,试样尺寸灵活多变,目前的技术方案一般先使用柔性平台及夹具对试样进行定位、再根据试样位置设定焊接路径后进行施焊,对于焊接试验而言一般是手工设定焊接起弧点和收弧点,通过两点对焊缝位置进行定位。除了效率低外,通过手工定位的两点保障焊接路径与母材间间隙的完全重合具有相当的难度,尤其是对于厚度在2mm及以下,焊接间隙在0.5mm以下的薄板,不熟练的操作工通过两点手工定位后进行焊接时经常出现焊缝偏离预留间隙的情况,从而造成偏焊缺陷。而对于厚板的多层多道焊接每道次均需要重新设定焊接路径,大大降低了焊接试验的工作效率,通过机器人的两点定位规划焊接路径难以保障多单次焊接路径空间上的平行关系,也带来了焊接缺陷的隐患。另外,通过柔性平台及夹具对试样进行定位后,难以实现对焊接预留间隙、角度修正的控制,焊接质量难以保障。
技术实现思路
1、本发明的目的在于针对现有技术之弊端,提供一种用于机器人焊接的试验定位平台,以提高机器人焊接效率和焊接质量。
2、为实现上述目的,本发明采用如下技术方案:
3、一种用于机器人焊接的试验定位平台,包括横移机构、升降机构、焊接试样对中及固定机构,以及自下而上依次排列的底座、底板和工作台,所述底板通过横移机构与底座连接,所述工作台通过升降机构与底板连接,所述焊接试样对中及固定机构包括焊接衬底、固定定位凸台、移动定位凸台、间隙卡具和压紧机构,所述焊接衬底嵌装在工作台上的长方形通槽中,所述通槽的一端两侧均设有固定定位凸台,另一端的两侧均设有下沉凹槽,每个凹槽内设有与焊接衬底的长度方向平行的滑轨,所述移动定位凸台的两端下部分别通过两凹槽内的滑轨与工作台滑动连接,在工作台衬底通槽与固定定位凸台相对应的一端及滑动定位凸台上均安装有可旋转的间隙卡具,两个焊接试样置于工作台上且二者从两侧压紧两个间隙夹具的同规格卡片,使焊接预留间隙落在焊接衬底中线位置,所述压紧机构设置在固定定位凸台和移动定位凸台上并将两个焊接试样压紧在工作台上。
4、上述用于机器人焊接的试验定位平台,所述压紧机构包括两个紧固梁,二者的一端分别固定在通槽两侧的固定定位凸台上,另一端通过与焊接衬底的长度方向平行的滑轨分别与移动定位凸台的两端滑动连接,在每个紧固梁上设有沿焊接衬底的长度方向分布的多个螺纹通孔,每个螺纹通孔中设有螺钉,两个紧固梁上的螺钉分别顶在两个焊接试样上。
5、上述用于机器人焊接的试验定位平台,所述压紧机构包括四个快速夹具,其中两个快速夹具分别安装在两个固定定位凸台上,另外两个快速夹具分别安装在移动定位凸台的两端上部,每个焊接试样的一端由一个固定定位凸台上的快速夹具压紧,另一端由移动定位凸台上的一个快速夹具压紧。
6、上述用于机器人焊接的试验定位平台,所述间隙卡具为正方形,其每个边的中部均设有凸起的间隙夹片,四个边上的间隙夹片厚度不同。
7、上述用于机器人焊接的试验定位平台,还包括多个沿工作台衬底通槽的长度方向排列的多个角度矫正插板,每个角度矫正插板的下端两侧插装于工作台衬底通槽两侧的插槽中,角度矫正插板的上端中间设有凹槽,所述凹槽的宽度、深度与衬板通槽宽度、深度一致。
8、上述用于机器人焊接的试验定位平台,所述角度矫正插板的上端两侧为弧形边,所述弧形边靠近工作台衬底通槽的部位高于远离工作台衬底通槽的部位。
9、上述用于机器人焊接的试验定位平台,还包括标定臂,所述标定臂包括固定臂和活动臂,所述固定臂的下端与底座固定连接,所述活动臂的一端与固定臂的上端转动连接,另一端固定有焊接轨迹标定杆,将焊接轨迹标定杆转动到标定位置或使之离开标定位置。
10、上述用于机器人焊接的试验定位平台,所述横移机构包括导轨、滑块、丝杆和螺母,所述导轨水平固定在底座上并与焊接衬底的长度方向垂直,所述滑块固定在底板的下部并与导轨滑动连接,所述丝杆平行于导轨并与底座转动连接,所述螺母固定在底板的下部并与丝杆螺纹配合,在丝杆的一端设有横移手轮。
11、上述用于机器人焊接的试验定位平台,所述升降机构包括光轴、丝杠、上挡板、铜套和丝母,所述光轴的下端与底板固定连接,上端穿过工作台并与上挡板固定连接,所述铜套滑动套装在光轴上并与工作台固定连接,所述丝杠的下端与底板转动连接,上端与上挡板转动连接,所述丝母固定在工作台上并与丝杠螺纹配合,在丝杠的上端设有调高手轮。
12、上述用于机器人焊接的试验定位平台,所述光轴设置两个,所述丝杠位于两个光轴之间,所述导轨设置两条,每条导轨对应两个滑块。
13、本发明利用焊接试样对中及固定机构对试样进行固定,通过两端间隙卡具保证两侧母材间隙处于中线位置,利用横移机构和升降机构调整试样的位置,将两试样之间的间隙移动到焊接轨迹的位置,从而实现对试样的定位。本发明通过精细化的调整保证预先规划的焊接路径与母材间间隙的完全重合,同时对于多层多道焊也可保证不同道次间焊接轨迹的平行。利用本发明无需重复规划焊接路径,可提高机器人焊接效率和焊接质量。
技术特征:
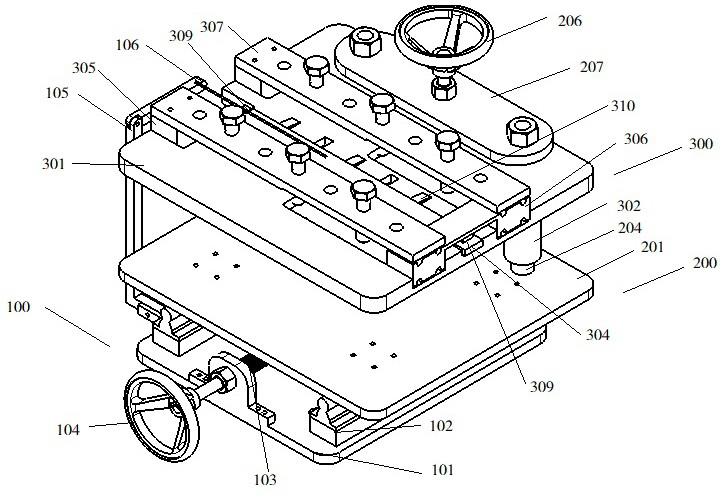
1.一种用于机器人焊接的试验定位平台,其特征是,包括横移机构、升降机构、焊接试样对中及固定机构,以及自下而上依次排列的底座(101)、底板(201)和工作台(301),所述底板(201)通过横移机构与底座(101)连接,所述工作台(301)通过升降机构与底板(201)连接,所述焊接试样对中及固定机构包括焊接衬底(304)、固定定位凸台(305)、移动定位凸台(306)、间隙卡具(309)和压紧机构,所述焊接衬底(304)嵌装在工作台(301)上的长方形通槽中,所述通槽的一端两侧均设有固定定位凸台(305),另一端的两侧均设有下沉凹槽,每个凹槽内设有与焊接衬底(304)的长度方向平行的滑轨,所述移动定位凸台(306)的两端下部分别通过两凹槽内的滑轨与工作台(301)滑动连接,在工作台衬底通槽与固定定位凸台(305)相对应的一端及滑动定位凸台(306)上均安装有可旋转的间隙卡具(309),两个焊接试样置于工作台(301)上且二者从两侧压紧两个间隙夹具(309)的同规格卡片,使焊接预留间隙落在焊接衬底(304)中线位置,所述压紧机构设置在固定定位凸台(305)和移动定位凸台(306)上并将两个焊接试样压紧在工作台(301)上。
2.根据权利要求1所述的一种用于机器人焊接的试验定位平台,其特征是,所述压紧机构包括两个紧固梁(307),二者的一端分别固定在通槽两侧的固定定位凸台(305)上,另一端通过与焊接衬底(304)的长度方向平行的滑轨分别与移动定位凸台(306)的两端滑动连接,在每个紧固梁(307)上设有沿焊接衬底(304)的长度方向分布的多个螺纹通孔,每个螺纹通孔中设有螺钉,两个紧固梁(307)上的螺钉分别顶在两个焊接试样上。
3.根据权利要求1所述的一种用于机器人焊接的试验定位平台,其特征是,所述压紧机构包括四个快速夹具(308),其中两个快速夹具(308)分别安装在两个固定定位凸台(305)上,另外两个快速夹具(308)分别安装在移动定位凸台(306)的两端上部,每个焊接试样的一端由一个固定定位凸台(305)上的快速夹具(308)压紧,另一端由移动定位凸台(306)上的一个快速夹具(308)压紧。
4.根据权利要求2或3所述的一种用于机器人焊接的试验定位平台,其特征是,所述间隙卡具(309)为正方形,其每个边的中部均设有凸起的间隙夹片,四个边上的间隙夹片厚度不同。
5.根据权利要求4所述的一种用于机器人焊接的试验定位平台,其特征是,还包括多个沿工作台衬底通槽的长度方向排列的多个角度矫正插板(310),每个角度矫正插板(310)的下端两侧插装于工作台衬底通槽两侧的插槽中,角度矫正插板(310)的上端中间设有凹槽,所述凹槽的宽度、深度与衬板通槽宽度、深度一致。
6.根据权利要求5所述的一种用于机器人焊接的试验定位平台,其特征是,所述角度矫正插板(310)的上端两侧为弧形边,所述弧形边靠近工作台衬底通槽的部位高于远离工作台衬底通槽的部位。
7.根据权利要求6所述的一种用于机器人焊接的试验定位平台,其特征是,还包括标定臂(105),所述标定臂(105)包括固定臂和活动臂,所述固定臂的下端与底座(101)固定连接,所述活动臂的一端与固定臂的上端转动连接,另一端固定有焊接轨迹标定杆(106),将焊接轨迹标定杆转动到标定位置或使之离开标定位置。
8.根据权利要求7所述的一种用于机器人焊接的试验定位平台,其特征是,所述横移机构包括导轨(102)、滑块(202)、丝杆(103)和螺母(203),所述导轨(102)水平固定在底座(101)上并与焊接衬底(304)的长度方向垂直,所述滑块(202)固定在底板(201)的下部并与导轨(102)滑动连接,所述丝杆(103)平行于导轨(102)并与底座(101)转动连接,所述螺母(203)固定在底板(201)的下部并与丝杆(103)螺纹配合,在丝杆(103)的一端设有横移手轮(104)。
9.根据权利要求8所述的一种用于机器人焊接的试验定位平台,其特征是,所述升降机构包括光轴(204)、丝杠(205)、上挡板(207)、铜套(302)和丝母(303),所述光轴(204)的下端与底板(201)固定连接,上端穿过工作台(301)并与上挡板(207)固定连接,所述铜套(302)滑动套装在光轴(204)上并与工作台(301)固定连接,所述丝杠(205)的下端与底板(201)转动连接,上端与上挡板(207)转动连接,所述丝母(303)固定在工作台(301)上并与丝杠(205)螺纹配合,在丝杠(205)的上端设有调高手轮(206)。
10.根据权利要求9所述的一种用于机器人焊接的试验定位平台,其特征是,所述光轴(204)设置两个,所述丝杠(205)位于两个光轴(204)之间,所述导轨(102)设置两条,每条导轨(102)对应两个滑块(202)。
技术总结
本发明公开了一种用于机器人焊接的试验定位平台,包括横移机构、升降机构、焊接衬底、固定定位凸台、移动定位凸台、压紧机构、底座、底板和工作台,底板通过横移机构与底座连接,工作台通过升降机构与底板连接,焊接衬底嵌装在工作台上的长方形通槽中,通槽的一端两侧均设有固定定位凸台,另一端的两侧均设有下沉凹槽,每个凹槽内设有与焊接衬底的长度方向平行的滑轨,移动定位凸台的两端下部分别通过两凹槽内的滑轨与工作台滑动连接,在工作台衬底通槽与固定定位凸台相对应的一端及滑动定位凸台上均安装有间隙卡具,压紧机构设置在固定定位凸台和移动定位凸台上。利用本发明无需重复规划焊接路径,可提高机器人焊接效率和焊接质量。
技术研发人员:马成,潘进,佘亚东,孙力,杨婷,牛月鹏,田兴,刘需
受保护的技术使用者:河北大河材料科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!