机器人与龙门组合双工位激光增减材制造及修复系统的制作方法
本发明涉及激光增材制造(3d打印)、机械加工、修复与再制造,具体为机器人与龙门组合双工位激光增减材制造及修复系统。
背景技术:
1、机械制造领域有许多高附加值的零部件(如:模具),在使用过程中往往因局部的、小范围的损伤或尺寸超差而不得不报废,如果采用修复技术进行修复或再制造,使零部件恢复原有功能,继续使用,将极大地节约资源,减少碳排放,避免不必要的浪费;
2、激光增材制造是一种新型修复技术,与广泛使用的、传统的电弧堆焊技术相比,具有灵活性高、可控性好,修复质量优异等突出优点;但是,在现阶段,激光增材制造的使用成本仍然比较高,主要原因是:这项技术对自动化程度要求较高,需要建立计算机模型才能确定待修复工件的坐标原点、刀具加工路径和激光加工路径;而电弧堆焊及修复前后的机加修型全部由人工完成,无需建模和校准坐标原点,完全靠经验和量规来保证加工精度;因此,对于非标准化的、产品数量不多的修复,或者精度要求不高的修复,基于电弧堆焊的人工修复技术成本较低,而在系列化产品的标准修复及高精度修复中,这种技术就需要大量的熟练工人,人力成本大幅上升,这时,基于计算机建模的自动化流水线式的激光修复技术就显出低成本的优势;
3、本发明提出机器人与龙门结构组合而成的双工位增减材制造及修复系统以变位机为核心,当它与机器人结合时,组成八轴激光增材制造系统,而与龙门结构结合时,组成五轴减材制造系统;该系统利用信息技术实现了两种加工技术的一体化,即基于激光的束流加工技术与基于刀具的机械加工技术的一体化,融合了长期以来独立发展的两个体系:基于机器人控制的激光增材制造和基于龙门结构的机加修型(减材制造),属于典型的光机电一体化装备;该系统大幅提高了生产效率,降低了激光制造与修复的成本。
技术实现思路
1、本发明的目的在于提供机器人与龙门组合双工位激光增减材制造及修复系统,以解决以上的问题。
2、为达到以上目的,提供以下技术方案:
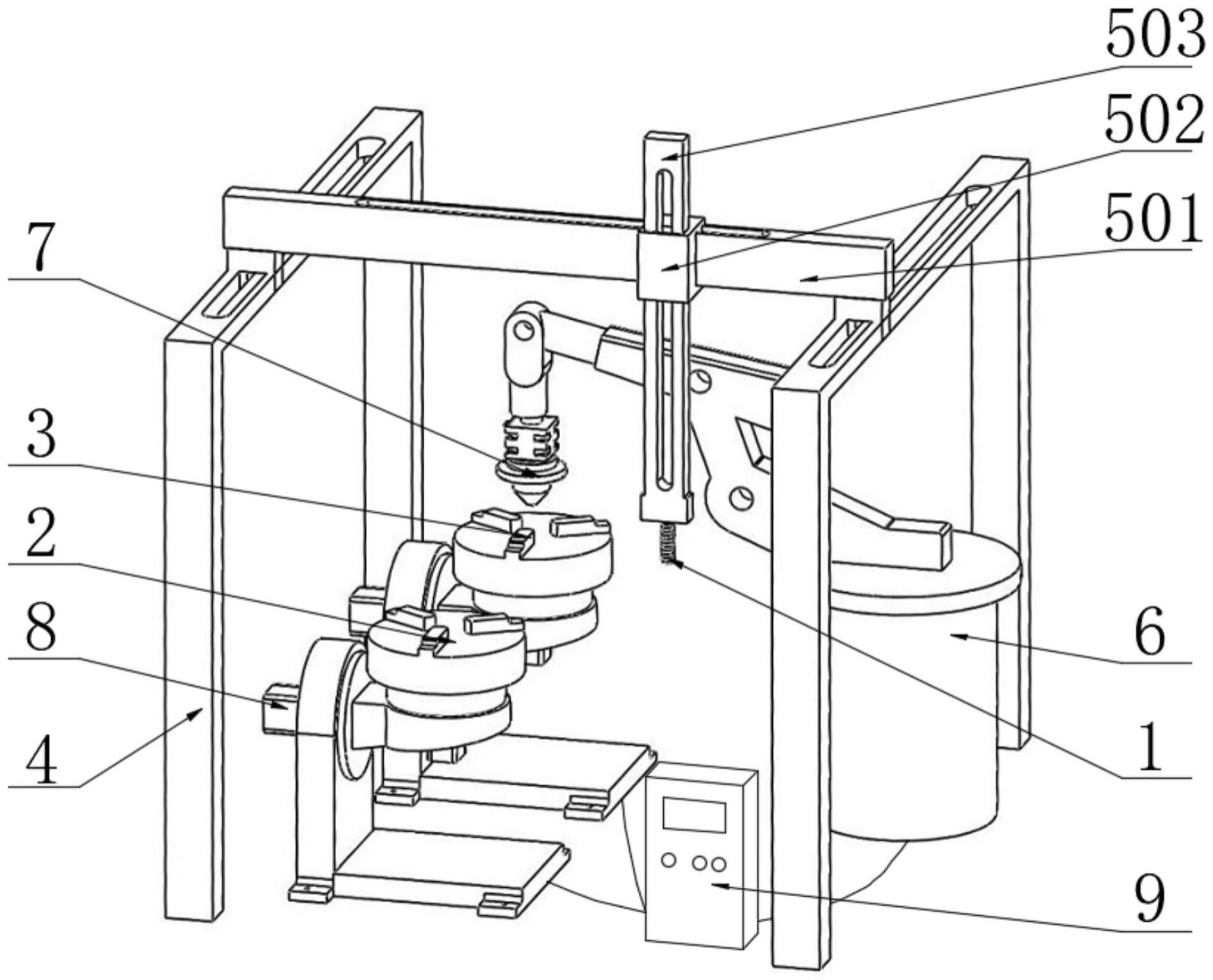
3、机器人与龙门组合双工位激光增减材制造及修复系统,与工件配合使用,包括:刀具、变位机、龙门架、机器人、激光熔覆头与软件控制系统,所述龙门架包括固定部与移动部,所述移动部架设于两个固定部之间,并可沿固定部运动,所述移动部包括移动梁、移动块与移动板,所述移动块套设于移动梁上并可沿移动梁的长度方向运动,所述移动板自上而下地穿过移动块并可与其可相对滑动,所述刀具固定连接于移动板的下端,用于加工工件,所述变位机与机器人相对设置,均对应位于龙门架下,所述变位机包括托盘与卡盘,所述工件安装于变位机的卡盘上,所述变位机包括2个旋转轴,所述变位机与机器人均由软件控制系统控制。
4、优选地,所述机器人包括6个旋转轴,所述激光熔覆头设置于机器人的顶端。
5、优选地,所述机器人与龙门架均可由变位机决定他们的运动状态,所述变位机上设有单刀三置开关,所述变位机可通过单刀三置开关设置为0、1、2三种状态,分别对应空置状态、与机器人联动状态、与龙门架联动状态,所述变位机可根据单刀三置开关的状态控制机器人和/或龙门架。
6、优选地,所述变位机包括第一变位机与第二变位机,所述机器人与龙门架的移动部均可运动至对应位于第一变位机上方的第一位置,还可运动至对应位于第二变位机上方的第二位置,所述机器人与龙门架的移动部可交替地设置于第一位置与第二位置处,进而机器人与龙门架可接续工作。
7、优选地,所述龙门架的移动部可通过移动板和/或移动块与移动梁的运动执行避让机器人动作,所述机器人可执行等待动作,进而防止龙门架的移动部与机器人碰撞。
8、优选地,所述第一变位机与第二变位机中的任意一种处于0状态时,所述机器人或龙门架运动时不执行避让动作。
9、优选地,所述第一变位机与第二变位机均不处于0状态时,所述龙门架的移动部通过移动板的升降和/或移动块与移动梁的运动执行避让动作,所述机器人执行等待动作至移动部的避让动作完成后,所述机器人根据变位机的状态运动至相应位置,所述机器人到位后,所述龙门架的移动部根据变位机的状态运动至相应位置。
10、优选地,所述龙门架的移动部通过移动板的升降执行避让动作时,所述移动板升至最高位置,等待所述机器人到位后,所述龙门架的移动部通过移动梁与移动块对应运动至第一位置或第二位置上方,再将移动板下降至第一位置。
11、优选地,所述龙门架的移动部通过移动块与移动梁的运动执行避让动作时,所述移动块与移动梁均移动至空闲位置,等待所述机器人到位后,所述龙门架的移动部可通过遍历移动块与移动梁各自的直线运动路径后到达第一位置或第二位置。
12、优选地,所述机器人可沿控制软件设定的路径移动至龙门架下。
13、本发明的有益效果为:
14、1.本发明提出机器人与龙门结构组合而成的双工位增减材制造及修复系统以变位机为核心,该系统利用信息技术实现了两种加工技术的一体化,即基于激光的束流加工技术与基于刀具的机械加工技术的一体化,融合了长期以来独立发展的两个体系:基于机器人控制的激光增材制造和基于龙门结构的机加修型(减材制造),属于典型的光机电一体化装备;该系统大幅提高了生产效率,降低了激光制造与修复的成本;
15、2.本发明当刀具和激光熔覆头同时调整位置时,两者相对运动的过程中,不会发生碰撞,提高了安全性能;
16、3.本发明变位机设置切换开关,从硬件上决定控制变位机的主体是机器人或是龙门。
技术特征:
1.机器人与龙门组合双工位激光增减材制造及修复系统,与工件配合使用,其特征在于:包括:刀具、变位机、龙门架、机器人、激光熔覆头与软件控制系统,所述龙门架包括固定部与移动部,所述移动部架设于两个固定部之间,并可沿固定部运动,所述移动部包括移动梁、移动块与移动板,所述移动块套设于移动梁上并可沿移动梁的长度方向运动,所述移动板自上而下地穿过移动块并可与其可相对滑动,所述刀具固定连接于移动板的下端,用于加工工件,所述变位机与机器人相对设置,均对应位于龙门架下,所述变位机包括托盘与卡盘,所述工件安装于变位机的卡盘上,所述变位机包括2个旋转轴,所述变位机与机器人均由软件控制系统控制。
2.根据权利要求1所述的机器人与龙门组合双工位激光增减材制造及修复系统,其特征在于:所述机器人包括6个旋转轴,所述激光熔覆头设置于机器人的顶端。
3.根据权利要求2所述的机器人与龙门组合双工位激光增减材制造及修复系统,其特征在于:所述机器人与龙门架均可由变位机决定他们的运动状态,所述变位机上设有单刀三置开关,所述变位机可通过单刀三置开关设置为0、1、2三种状态,分别对应空置状态、与机器人联动状态、与龙门架联动状态,所述变位机可根据单刀三置开关的状态控制机器人和/或龙门架。
4.根据权利要求3所述的机器人与龙门组合双工位激光增减材制造及修复系统,其特征在于:所述变位机包括第一变位机与第二变位机,所述机器人与龙门架的移动部均可运动至对应位于第一变位机上方的第一位置,还可运动至对应位于第二变位机上方的第二位置,所述机器人与龙门架的移动部可交替地设置于第一位置与第二位置处,进而机器人与龙门架可接续工作。
5.根据权利要求4所述的机器人与龙门组合双工位激光增减材制造及修复系统,其特征在于:所述龙门架的移动部可通过移动板和/或移动块与移动梁的运动执行避让机器人动作,所述机器人可执行等待动作,进而防止龙门架的移动部与机器人碰撞。
6.根据权利要求5所述的机器人与龙门组合双工位激光增减材制造及修复系统,其特征在于:所述第一变位机与第二变位机中的任意一种处于0状态时,所述机器人或龙门架运动时不执行避让动作。
7.根据权利要求5所述的机器人与龙门组合双工位激光增减材制造及修复系统,其特征在于:所述第一变位机与第二变位机均不处于0状态时,所述龙门架的移动部通过移动板的升降和/或移动块与移动梁的运动执行避让动作,所述机器人执行等待动作至移动部的避让动作完成后,所述机器人根据变位机的状态运动至相应位置,所述机器人到位后,所述龙门架的移动部根据变位机的状态运动至相应位置。
8.根据权利要求7所述的机器人与龙门组合双工位激光增减材制造及修复系统,其特征在于:所述龙门架的移动部通过移动板的升降执行避让动作时,所述移动板升至最高位置,等待所述机器人到位后,所述龙门架的移动部通过移动梁与移动块对应运动至第一位置或第二位置上方,再将移动板下降至第一位置。
9.根据权利要求7所述的机器人与龙门组合双工位激光增减材制造及修复系统,其特征在于:所述龙门架的移动部通过移动块与移动梁的运动执行避让动作时,所述移动块与移动梁均移动至空闲位置,等待所述机器人到位后,所述龙门架的移动部可通过遍历移动块与移动梁各自的直线运动路径后到达第一位置或第二位置。
10.根据权利要求1-9任意一项所述的机器人与龙门组合双工位激光增减材制造及修复系统,其特征在于:所述机器人可沿控制软件设定的路径移动至龙门架下。
技术总结
本发明涉及激光增材制造(3D打印)、机械加工、修复与再制造技术领域,具体为机器人与龙门组合双工位激光增减材制造及修复系统,与工件配合使用,包括:刀具、变位机、龙门架、机器人、激光熔覆头与软件控制系统,本发明提出机器人与龙门结构组合而成的双工位增减材制造及修复系统以变位机为核心,该系统利用信息技术实现了两种加工技术的一体化,即基于激光的束流加工技术与基于刀具的机械加工技术的一体化,融合了长期以来独立发展的两个体系:基于机器人控制的激光增材制造和基于龙门结构的机加修型(减材制造),属于典型的光机电一体化装备;该系统大幅提高了生产效率,降低了激光制造与修复的成本。
技术研发人员:李明南
受保护的技术使用者:吉林省力科科技有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!