面向ALC板材生产线的智能装配系统及方法
本发明属于机器视觉应用,尤其涉及一种面向alc板材生产线的智能装配系统及方法。
背景技术:
1、alc板材装配系统是alc板材生产线的一个关键环节,将机器人引入到alc板材装配系统中,可以减轻工人劳动强度,提高生产效率和生产质量,可以实时监控,智能运行,工人能轻松、舒适地工作,成品率提升,减少资金投入,国内外多家公司和机构已经开展这方面的研究。
2、但是目前的智能化alc板材装配系统中还没有引入机器人和视觉检测技术,alc板材生产线中传统装配方式效率低、现代工业装配机器人适应能力差,而alc板材生产线的智能装配在具有广阔的市场需求。
技术实现思路
1、针对现有技术的不足,本发明提出一种面向alc板材生产线的智能装配方法及系统,其采用双机械臂之间协同控制,对alc板材生产装配过程中误差修正,实现智能装配,从而保证系统的低时延、高准确度、稳定性。
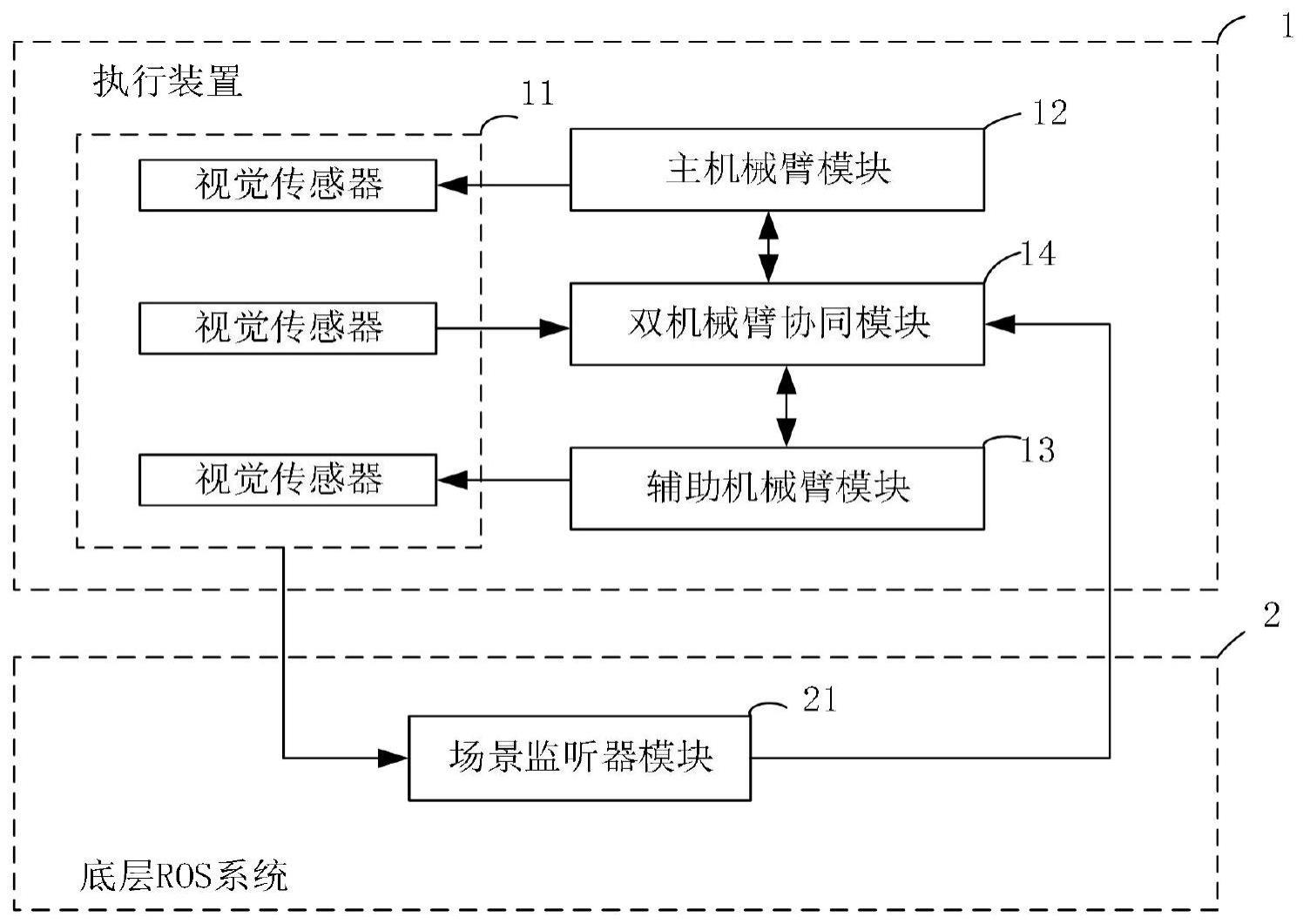
2、为了实现上述目的,本发明一方面提供一种面向alc板材生产线的智能装配系统,包含:
3、多个视觉传感器,用于采集主机械臂模块的位姿信息、辅助机械臂模块的位姿信息、以及装配件信息;
4、一主机械臂模块,用于alc板材生产装配过程对各装配件进行装配操作;
5、一辅助机械臂模块,用于alc板材生产装配过程,辅助所述主机械臂模块,对各装配件进行装配操作;
6、一双机械臂协同模块,同时与所述主机械臂模块、所述辅助机械臂模块、所述视觉传感器连接,用于获取所述位姿信息与所述装配件信息并进行处理生成一动作指令,控制协调所述主机械臂模块与所述辅助机械臂模块动作。
7、可选的,所述主机械臂模块至少末端设置一所述视觉传感器,用于采集所述主机械臂模块的末端位姿;
8、所述辅助机械臂至少末端设置一所述视觉传感器,用于采集所述辅助机械臂模块的末端位姿。
9、可选的,所述双机械臂协同模块融合人工势场算法与线性插值算法,
10、依据所述主机械臂模块的位姿信息、所述辅助机械臂模块的位姿信息、装配件信息,构造影响机械臂运动的引力场与斥力场,所述引力场为依据所述装配件信息形成,所述斥力场为依据主机械臂模块的位姿信息形成;
11、优先规划所述主机械臂模块的运动路径;
12、将引力场与斥力场生成一合势场;
13、依据所述合势场,进行插值运算,规划所述辅助机械臂模块的运动路径。
14、可选的,插值运算后所述辅助机械臂模块的末端位姿表示为:
15、
16、其中,为增量系数,n为总插值运算次数,i为当前所进行的插值运算次数,(xs、ys、zs)为合势场,δx、δy、δz分别表示x、y、z方向的增量。
17、可选的,所述面向alc板材生产线的智能装配系统,还包含:
18、一底层ros系统,包含:
19、一场景监听器模块,与所述视觉传感器、以及所述双机械臂协同模块连接;
20、用于监听规划场景中的障碍物信息;以及
21、在监测到障碍物时,将所述主机械臂模块位姿信息、和/或,所述辅助机械臂模块的位姿信息、装配件信息,结合所述障碍物信息,生成一避障指令传输至所述双机械臂协同模块,以协调所述主机械臂模块、和/或所述辅助机械臂模块至少距离障碍物一安全间距动作。
22、可选的,所述底层ros系统通过虚拟机上的usb_cam设置与所述视觉传感器物理连接,并通过kinect驱动控制与所述视觉传感器、双机械臂协同模块完成传输匹配。
23、可选的,所述场景监听器模块采用suyolo-6d算法,所述suyolo-6d算法采用darknrt-53网络结构,将算法回归函数及激活函数中的softmax用sigmoid代替,用于多标签分类。
24、本发明另一方面还提供了一种面向alc板材生产线的智能装配方法,采取上述的面向alc板材生产线的智能装配系统,至少包含:
25、采集主机械臂模块的位姿信息、辅助机械臂模块的位姿信息、以及装配件信息;
26、依据主机械臂模块的位姿信息、辅助机械臂模块的位姿信息、所述装配件信息,生成一动作指令,控制协调所述主机械臂模块与所述辅助机械臂模块动作。
27、可选的,依据主机械臂模块的位姿信息、辅助机械臂模块的位姿信息、所述装配件信息,生成一动作指令,包含:
28、对每一所述装配件进行目标定位,依据所述主机械臂模块的位姿信息、所述辅助机械臂模块的位姿信息,得到每一所述装配件在双机械臂系统中的位置信息,所述装配件信息包含每一装配件的位置信息;
29、依据所述主机械臂模块的位姿信息、每一装配件的位置信息,生成所述主机械臂模块的运动路径;
30、依据所述主机械臂模块的运动路径、以及所述辅助机械臂模块的位姿信息,生成所述辅助机械臂模块的运动路径;
31、结合所述主机械臂模块的运动路径与所述辅助机械臂模块的运动路径生成一动作指令,协调所述主机械臂模块与所述辅助机械臂模块对每一装配件进行装配。
32、可选的,所述的面向alc板材生产线的智能装配方法,还包括
33、监听规划场景中是否存在障碍物;
34、在监测到存在障碍物时,将所述主机械臂模块位姿信息、所述辅助机械臂模块的位姿信息、结合装配件的位置信息与所述障碍物信息,生成一避障指令,所述避障指令包含至少距离所述障碍物一安全间距;
35、所述双机械臂协同模块依据所述避障指令,协调所述主机械臂模块、所述辅助机械臂模块在至少距离所述障碍物一安全间距动作。
36、由以上方案可知,本发明的优点在于:
37、本发明提供的面向alc板材生产线的智能装配系统及方法,通过设置多个视觉传感器,采集主机械臂模块的位姿信息与辅助机械臂模块的位姿信息、以及装配件信息;设置主机械臂模块与辅助机械臂模块,主机械臂模块作为主执行结构、辅助机械臂模块作为辅助执行机构,通过双机械臂协同模块,依据主机械臂模块的位姿信息、辅助机械臂模块的位姿信息、以及所述装配件信息并进行处理生成一动作指令或避障指令,控制协调所述主机械臂模块与所述辅助机械臂模块动作。该系统利用视觉作为主目标识别传感的系统中,双机械臂之间协同控制运算在系统中预留了足够的运算内存,从而保证系统的低时延、高准确度、稳定性。此外,本实施例在ros系统中添加场景监听器模块进行避障监测,构建了底层导向系统,控制检测机器人场景中是否存在以及实时运行中是否有新的障碍物出现,判断路径是否重新规划,实现系统的安全避障。
技术特征:
1.一种面向alc板材生产线的智能装配系统,其特征在于,包含:
2.根据权利要求1所述的系统,其特征在于,
3.根据权利要求1或2所述的系统,其特征在于,
4.根据权利要求3所述的系统,其特征在于,
5.根据权利要求1所述的系统,其特征在于,还包含:
6.根据权利要求5所述的系统,其特征在于,
7.根据权利要求5所述的系统,其特征在于,
8.一种面向alc板材生产线的智能装配方法,其特征在于,采取权利要求1-7任一项所述的面向alc板材生产线的智能装配系统,至少包含:
9.根据权利要求8所述的方法,其特征在于,
10.根据权利要求9所述的方法,其特征在于,还包含:
技术总结
本发明提供一种面向ALC板材生产线的智能装配系统及方法,系统包含:多个视觉传感器,用于采集主机械臂模块的位姿信息与辅助机械臂模块的位姿信息、以及装配件信息;一主机械臂模块,用于ALC板材生产装配过程对各装配件进行装配操作;一辅助机械臂模块,用于辅助主机械臂模块,对各装配件进行装配操作;一双机械臂协同模块,同时与主机械臂模块、辅助机械臂模块、视觉传感器连接,用于获取主机械臂模块的位姿信息、辅助机械臂模块的位姿信息、以及装配件信息并进行处理生成一动作指令,控制协调主机械臂模块与辅助机械臂模块动作。该系统采用双机械臂之间协同控制,对ALC板材生产装配过程中误差修正,实现智能装配。
技术研发人员:李娜,李继瑞,信苗苗,倪晓梅,厉相宝,曹凤
受保护的技术使用者:齐鲁理工学院
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!