一种用于数控机床夹具检测的机器人检测系统
本发明涉及夹具检测,具体为一种用于数控机床夹具检测的机器人检测系统。
背景技术:
1、数控机床夹具是用于保持工件在机床上稳定的装置,使得机床能稳定地加工工件。为了保证工件夹持的精度,通常会利用机器人系统和先进的检测技术,对数控机床夹具进行检测,以确保其质量、准确性和性能。这种系统可以提高生产效率,降低人为错误,并确保生产的零件和产品达到高质量标准。这在制造业和工程领域中具有广泛的应用。
2、目前大多的机器人检测系统在检测夹具的过程中,多是通过传感器的配合将夹具的数据采集,进而判断夹具是否合格,但是传感器的长时间使用和外界因素的影响,传感器的精度会出现偏差,导致在检测过程中收集的夹具信息出现偏差,从而影响检测的精度。为此本发明提出一种用于数控机床夹具检测的机器人检测系统。
技术实现思路
1、针对现有技术的不足,本发明提供了一种用于数控机床夹具检测的机器人检测系统,解决了现有技术中机器人检测系统内的传感器在长时间使用和外界因素的影响下,传感器的精度会出现偏差,导致在检测过程中收集的夹具信息出现偏差的问题。
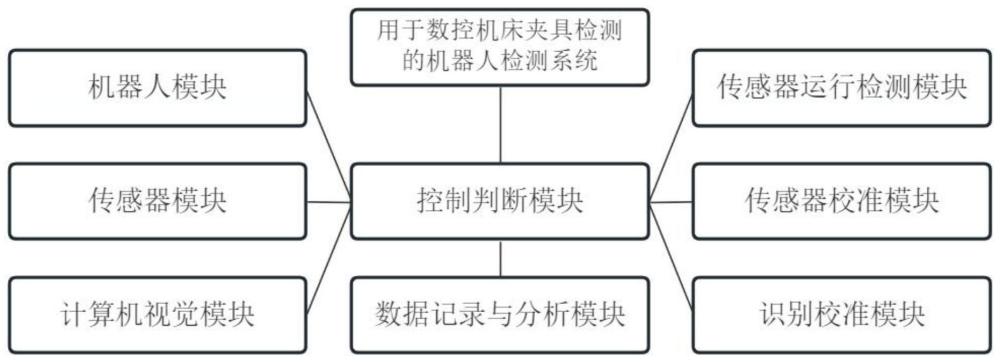
2、为实现以上目的,本发明通过以下技术方案予以实现:一种用于数控机床夹具检测的机器人检测系统,包括:
3、机器人模块,用于负责夹具的搬运和定位;
4、传感器模块,用于检测和收集夹具的相关数据;
5、计算机视觉模块,用于处理和分析从视觉传感器获取的图像数据;
6、控制判断模块,用于协调机器人的运动和传感器的数据采集;
7、数据记录与分析模块,用于记录每个夹具的检测结果和历史数据,以供质量控制、追溯性分析和生产过程优化;
8、传感器运行检测模块,用于检测传感器的工作状态;
9、传感器校准模块,用于校准传感器的工作精度;
10、识别校准模块,用于校准视觉图像识别的夹具数据。
11、优选的,所述机器人模块包括:
12、机器臂单元,用于使用多轴机器人臂移动和搬运夹具;
13、末端执行单元,用于夹取和处理夹具;
14、机器人控制单元,用于协调机器人的运动和任务执行。
15、优选的,所述传感器模块包括:
16、视觉传感器单元,用于检测夹具的尺寸、形状和表面缺陷;
17、力传感器单元,用于测量夹具与工件之间的力或夹紧力;
18、压力传感器单元,用于检测夹具的紧固压力;
19、位移传感器单元,用于测量夹具各个部分的位置和相对运动。
20、优选的,所述计算机视觉模块包括:
21、摄像头单元,用于采集夹具的图像;
22、图像处理单元,用于处理和分析图像数据,识别夹具的特征和缺陷;
23、识别对比单元,用于根据传感数据识别不同类型的夹具和缺陷。
24、优选的,所述控制判断模块包括:
25、控制软件单元,用于编程和控制机器人的任务和运动;
26、决策判断单元,用于根据传感器数据和检测结果制定决策;
27、安全控制单元,用于确保系统的安全操作,防止事故和损坏;
28、通信接口单元,用于与其他系统、设备或工厂自动化系统进行数据交换和协作。
29、优选的,所述数据记录与分析模块包括:
30、数据记录单元,用于存储夹具检测的所有数据;
31、数据标识单元,用于为每个夹具生成唯一的标签或标识符,以便将检测数据与特定夹具相关联;
32、数据分析单元,用于处理和分析夹具检测数据,检测夹具的质量和性能;
33、历史记录对比单元,用于将分析出的夹具数据和历史记录的夹具数据进行对比识别。
34、优选的,所述传感器运行检测模块包括:
35、传感器输出检测单元,用于检测传感器的实际输出,识别是否存在异常或不准确的测量数据;
36、视觉辅助检测单元,用于通过视觉图像检测和评估其他传感器的输出;
37、数据同步单元,用于确保传感器数据的时间戳与机器人动作的时间戳同步;
38、传感数据分析单元,用于分析传感器的输出数据,识别任何异常或不准确的测量;
39、传感数据对比单元,用于与先前的传感器数据进行比较,识别任何变化或偏差。
40、优选的,所述传感器校准模块包括:
41、传感数据采集单元,用于采集传感器运行过程中的输出数据;
42、增益校准单元,用于调整传感器输出的斜率,使其与已知的基准值匹配;
43、校准数据记录单元,用于记录校准点、校准时间和所采用的校准方法信息;
44、验证校准单元,用于重新测量标准参考物体或基准值,并与校准前的数据进行比较,以验证校准的有效性;
45、定期校准单元,用于设置定期的时间对传感器的输出数据进行校准。
46、优选的,所述识别校准模块包括:
47、特征提取单元,用于识别和提取有助于夹具检测的关键特征;
48、数据集中单元,用于整合多个传感器采集的数据,提高数据全面性和准确性;
49、分类算法单元,用于使用分类算法来确定夹具是合格还是不合格;
50、异常检测单元,用于使用异常检测算法来识别潜在的异常夹具;
51、定时反馈和校准单元,用于根据实时的检测结果调整操作,实现夹具数据实时反馈和校正。
52、优选的,所述传感器模块、所述传感器运行检测模块、所述传感器校准模块和所述控制判断模块之间通过can总线接口建立数据传输连接,以自动调整传感器设置,并在需要时校准传感器,从而实现实时反馈和控制。
53、工作原理:通过机器人模块将待检测的夹具进行定位固定,随后启动夹具进行测试,通过传感器模块内的各个传感器单元实现夹具测试数据的接收,随后,同时传感器输出的数据会被传感器运行检测模块接收,通过传感器输出单元接收传感器的数据,并通过视觉辅助单元和摄像头单元的配合,实现对夹具数据的采集,并将采集的数据通过传感数据分析单元提取,之后再通过传感数据对比单元和其他传感器收集的数据进行比对,判断数据是否准确,当出现异常时,控制判断模块会接收并将数据传递至传感器校准单元,随后通过增益校准单元对传感器的输出的斜率进行调整,使其与已知的基准值匹配,随后通过验证检测单元对调整后的传感器进行验证,并且通过定期校准单元定时的触发传感器输出数据的收集和检测,保证传感器精度稳定,提高机器人系统监测夹具的精度。再通过传感器收集夹具的数据时,计算机视觉单元也收集夹具的图像数据,通过识别对比单元判断出夹具的类型和缺陷,之后通过识别校准模块的特征提取单元将夹具的检测数据提取,通过数据集中单元将各个传感器单元采集的信息集中处理,并采用异常检测单元将相同属性的数据进行对比,判断是否数据异常,之后通过分类算法单元将夹具数据和标准数据阈值进行对比,确定夹具是合格还是不合格,降低检测系统在运行时产生错误地将正常夹具标记为不合格或假阴性未能检测到夹具的真正缺陷的结果。之后数据记录与分析模块会将数据记录,并通过数据标识单元对数据添加唯一的标识,方便后续检测同类型的夹具时,能够直接将检测的数据和历史数据进行定位分析比对,快速确定夹具的数据是否合格。
54、本发明提供了一种用于数控机床夹具检测的机器人检测系统。具备以下
55、有益效果:
56、1、本发明通过传感器模块、控制判断模块、传感器运行检测模块和传感器校准模块的配合,使得机器人检测系统在检测机床夹具时,会定时地触发传感器输出数据的收集和检测,并对传感器的输出精度进行调整,保证传感器精度稳定,提高机器人系统检测夹具的精度。
57、2、本发明通过传感器模块、计算机视觉模块、数据记录与分析模块和识别校准模块的配合,保证机器人检测系统在检测夹具时,降低检测系统在运行时产生错误地将正常夹具标记为不合格或假阴性未能检测到夹具的真正缺陷的结果,同时方便后续检测同类型的夹具时,能够直接将检测的数据和历史数据进行定位分析比对,快速确定夹具的数据是否合格。
- 还没有人留言评论。精彩留言会获得点赞!