一种带旋转夹具的激光焊接装置的制作方法
本发明属于激光焊接,具体涉及一种带旋转夹具的激光焊接装置。
背景技术:
1、激光焊接是利用高能量密度的激光束对加工材料的微小区域进行局部加热的过程,其中,到达加工材料表面的热量通过热传导作用向内部进行扩散,使加工材料融化从而达到焊接的目的。圆柱形工件的焊接目前已广泛应用到汽车领域、医疗领域、3c领域以及半导体领域,比如玻璃管、模具、齿轮等。现有的激光焊接头,在对圆柱形工件进行加工时,不仅需要安装不同尺寸的旋转夹具,还需要精准的激光对位,这种方式费时费力,加工工艺流程繁琐。因此,亟需提供一种能够满足圆柱形工件焊接的焊接装置,且能简单、精准对位的焊接头。
技术实现思路
1、针对上述现有技术存在的问题,本发明提供一种带旋转夹具的激光焊接装置,该装置能够满足圆柱形工件的焊接需求,且其操作过程简单,能实现待焊接工件的精准对位,有利于提高焊接效率,并能确保焊接效果。
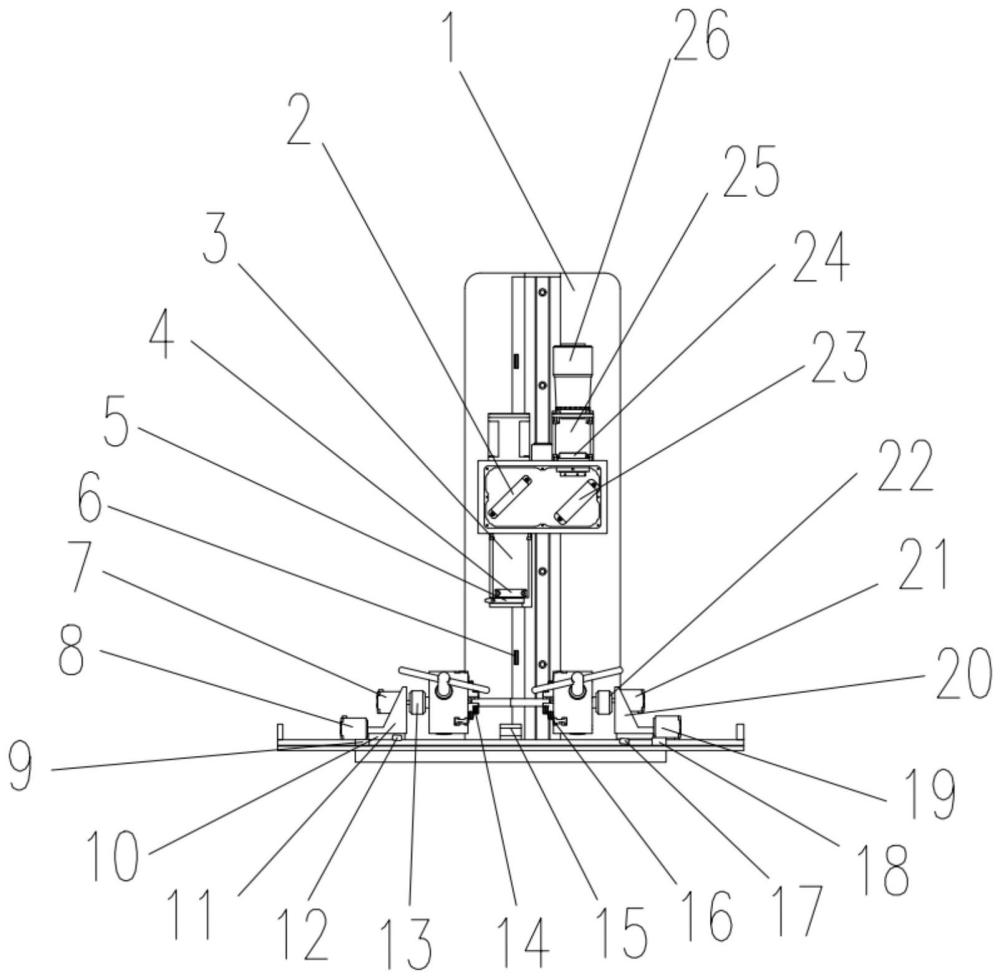
2、为了实现上述目的,本发明提供一种带旋转夹具的激光焊接装置,包括支撑机构、竖向调焦机构、激光焊接机构、横向位移调节机构和旋转调节机构;
3、所述支撑机构包括安装底板和焊接板;所述安装底板水平设置,所述焊接板竖直地设置在安装底板的上方,且其下端与安装底板的上端面固定连接;
4、所述竖向调焦机构包括高精密直线导轨a、高精密滑块a、限位组件a、限位组件b、直线电机a、挡板a、光电开关a和光电开关b;所述高精密直线导轨a竖直地固定连接在焊接板的后侧面上;所述高精密滑块a滑动地装配在高精密直线导轨a上;所述限位组件a和限位组件b上下相对地安装在高精密直线导轨a的上端和下端,用于对高精密滑块a在竖向上的最大位移进行限定;所述直线电机a装配在高精密滑块a上,用于驱动高精密滑块a在高精密直线导轨a上的滑动动作;所述挡板a安装在高精密滑块a的左侧面上;所述光电开关a固定安装在高精密直线导轨a上部的后侧面上,光电开关b固定安装在高精密直线导轨a下部的后侧面上,且光电开关a、光电开关b和挡板a在竖向上相对齐;
5、所述激光焊接机构包括光室主体、检测装置、镜筒a、第一透镜、激光固定头、镜筒b、第二透镜、保护镜、第一反射镜、第二反射镜;所述光室主体固定连接在高精密滑块a的后侧面上,其上端的左部和右部分别开设有与其内腔连通的第一上通孔和第二上通孔,其下端的左部开设有与其内腔连通的下通孔;所述检测装置和镜筒a分别设置在光室主体上端的左部和右部;检测装置安装于第一上通孔处,用于对焊接轨迹进行实时观测和记录;镜筒a的上下两端相对地开设有一对通光口a,其安装于第二上通孔处,且其下侧的通光口a与第二上通孔相对齐;所述第一透镜安装在镜筒a内部的底侧,用于将激光进行准直;所述激光固定头固定安装于镜筒a的上侧通光口处;所述镜筒b的上下两端相对地开设有一对通光口b,镜筒b设置在光室主体下端的左部,且其安装于下通孔处,其上侧的通光口b与下通孔相对齐;所述第二透镜安装在镜筒b内部的底侧,用于对激光进行聚集;所述保护镜设置在第二透镜的下侧,且安装在镜筒b的下端;所述第二反射镜和第一反射镜左右相对地安装在光室主体内腔的左侧和右侧;第二反射镜位于下通孔的正上方,且其安装角度呈45°;第一反射镜位于第二上通孔的正下方,且其安装角度呈45°;
6、所述横向位移调节机构包括高精密直线导轨b、高精密滑块b、高精密滑块c、限位组件c、限位组件d、直线电机b、直线电机c、挡板b、挡板c、光电开关c、光电开关d和到位传感器;所述高精密直线导轨b水平地设置在激光焊接机构的下方,且固定连接在安装底板的上端,其长度方向沿左右方向延伸;所述高精密滑块b和高精密滑块c分别滑动地装配在高精密直线导轨b的左部和右部;所述限位组件c安装在高精密直线导轨b的左端,用于对高精密滑块b向左侧的最大位移进行限定;所述限位组件d安装在高精密直线导轨b右端,用于对高精密滑块c向右侧的最大位移进行限定;所述直线电机b安装在高精密滑块b上,用于驱动高精密滑块b在高精密直线导轨b上的滑动动作;所述直线电机c安装在高精密滑块c上,用于驱动高精密滑块c在高精密直线导轨b上的滑动动作;所述挡板b固定连接在高精密滑块b的后侧面上;所述挡板c固定连接在高精密滑块c的后侧面上;所述光电开关c与挡板b在横向上相对齐,且固定安装在高精密直线导轨b左部的上端;所述光电开关d与挡板c在横向上相对齐,且固定安装在高精密直线导轨b右部的上端;所述到位传感器位于镜筒b的正下方,且固定安装在高精密直线导轨b上;
7、所述旋转调节机构包括三角转接板a、三角转接板b、旋转电机a、旋转电机b、电机转接件a、电机转接件b、卡盘a、卡盘b、卡爪a、卡爪b、调节手柄a和调节手柄b;所述三角转接板a和三角转接板b左右相对设置,且分别固定安装在高精密滑块b和高精密滑块c上;所述旋转电机a和旋转电机b左右相对设置,且分别安装在三角转接板a和三角转接板b上;所述电机转接件a位于三角转接板a的右侧,且固定连接在旋转电机a的输出轴上;所述电机转接件b位于三角转接板b的左侧,且固定连接在旋转电机b的输出轴上;所述卡盘a和卡盘b左右相对设置,且其相背离一面的旋转中心分别与电机转接件a的右端和电机转接件b的左端固定连接;卡盘a和卡盘b的结构尺寸相同,其相对一侧的内部均开设有三个安装凹槽;三个卡爪a对应地安装在卡盘a内部的三个安装凹槽中;三个卡爪b对应地安装在卡盘b内部的三个安装凹槽中;所述调节手柄a安装在卡盘a的外侧,用于通过旋转动作来调节三个卡爪a在径向上的相对位置;所述调节手柄b安装在卡盘b的外侧,用于通过旋转动作来调节三个卡爪b在径向上的相对位置。
8、进一步,为了能方便地将安装底板固定连接在不同的安装平台上,所述安装底板上遍布其表面地开设有若干个安装孔。
9、作为一种优选,所述限位组件a和限位组件b均为水平限位板,所述限位组件c和限位组件d均为立式限位板。
10、进一步,为了确保实时观测和记录效果,所述检测装置内部设置有ccd相机和镜头。
11、进一步,为了确保检测装置对检测轨迹的检测效果,所述第一上通孔与下通孔同轴地设置。
12、作为一种优选,所述到位传感器为位移传感器。
13、进一步,为了更精准缓慢地实现工件的旋转动作,以确保焊接效果,所述电机转接件a和电机转接件b均为减速器。
14、本发明中,在焊接板的后侧面上安装高精密直线导轨a,并于高精密直线导轨a上安装由直线电机a驱动的高精密滑块a,可以便于通过电动的方程精准地改变高精密滑块a在竖向上的高度,这样,当将激光焊接机构连接在高精密滑块a上后,便可以通过对高精密滑块a的调节来便捷精准地改变激光焊接机构在竖向上的位置,进而能达到快速精准调焦的目的;在高精密直线导轨a的上下两端分别连接限位组件a和b,可以有效防止高精密滑块a滑出高精密直线导轨a的情况发生。使光电开关a和光电开关b分别安装在高精密直线导轨a的上部和下部,同时,在高精密滑块a的侧面对应安装有挡板a,这样,在高精密滑块a在高精密直线导轨a上滑动的过程中,挡板a在高精密滑块a同步滑动过程中会分别触发光电开关a和光电开关b,光电开关a和光电开关b在被触发后会发向触发信号a和b,进而能便于控制系统在接收到触发信号a和b时控制直线电机a停止动作,进而能起到软限位的功能,可有效防止高精密滑块a撞击限位组件a的情况发生,同时,能避免激光焊接机构直接撞击横向位移调节机构或旋转调节机构的情况发生。在镜筒a内部的底侧安装第一透镜,能将进入镜筒a的激光进行准直,进而能确保激光的能量能集中向下方进行传递;在镜筒b内部底侧安装第二透镜,能对由镜筒b发射出的激光进行聚集,进而能确保激光的能量集中作用于焊接点;在光室主体内部设置有位于第二上通孔下方的第一反射镜、设置有位于下通孔上方的第二反射镜,并使其均呈45°的倾斜,再使镜筒a安装于第二上通孔处,使镜筒b安装于下通孔处,能确保由镜筒a进入光室主体中的激光能通过第一反射镜反射到第二反射镜上,再由第二反射镜反射至镜筒b中,进到到达第二透镜上,并;在第二透镜的下侧设置保护镜,可以对第二透镜进行保护,进而能避免在上下移动过程中由于误接触到工件而使第二透镜产生损伤。在光室主体上端的第一上通孔处安装有检测装置,可以便于在焊接过程中实时地对焊接轨迹进行观测和记录,有利于同步地对焊接效果进行检测;在焊接板的上端面上安装高精密直线导轨b,并于高精密直线导轨b的左部安装由直线电机b驱动的高精密滑块b,于高精密直线导轨b的右部安装由直线电机c驱动的高精密滑块c,可以便于通过电动的方程精准地改变高精密滑块b和高精密滑块c在高精密直线导轨b上位置,在此基础上,将卡盘a和b分别连接在高精密滑块b和高精密滑块c上,便可以通过对高精密滑块b和c的调节来便捷精准地改变卡盘a和b的相对位置,进而能达到快速调整两个卡盘上工件相对位置的目的。在高精密直线导轨b的左右两端分别连接限位组件c和d,可以有效防止高精密滑块b从左端滑出高精密直线导轨b、高精密滑块c从右端滑出高精密直线导轨b的情况发生。在高精密滑块b的后侧面上安装挡板b,并于高精密直线导轨b的左部对应安装有光电开关c,可以在高精密滑块b在向左侧滑动过程中,通过挡板b与光电开关c的接触配合来触发光电开关c,这样,当光电开关c被触发后可以发出触发信号c,控制系统在接收到触发信号c后便于及时控制直流电机b停止动作,进而能避免高精密滑块b撞击限位组件c的情况发生。在高精密滑块c的后侧面上安装挡板c,并于高精密直线导轨b的右部对应安装有光电开关d,可以在高精密滑块b在向右侧滑动过程中,通过挡板c与光电开关d的接触配合来触发光电开关d,这样,当光电开关d被触发后可以发出触发信号d,控制系统在接收到触发信号d后便于及时控制直流电机c停止动作,进而能避免高精密滑块c撞击限位组件d的情况发生。通过到位传感器的设置,可以便于检测出待焊接的两个工件拼接处的位置是否达到激光聚焦位置,同时,可以在到位后向控制系统发出到位信号,有利于确保焊接过程的可靠进行。在高精密滑块b和高精密滑块c上相对地安装有三角转接板a和b,可以便于为旋转电机a和b提供安装支撑;分别利用电机转接件a和b将卡盘a和b与旋转电机a和b连接,可以便于降低旋转电机a和b的转速,进而能使位于卡盘a中的工件a和位于卡盘b中的工作b能够缓慢匀速地旋转,有利于确保高质量的焊接作业。利用调节手柄a和b分别来调节卡盘a和b中的三个卡爪a和b在径向上改变相对位置,可以改变三个卡爪中心夹持孔的孔径,进而能适应不同直径圆柱形工件的夹持需求。
15、该装置能够满足圆柱形工件的焊接需求,且其操作过程简单,能实现待焊接工件的精准对位,有利于提高焊接效率,并能确保焊接效果。本发明能适用于圆柱形工件的焊接需求,并可有效解决圆柱形工件焊接的繁琐工艺问题流程,在提高了焊接效果的同时,还有效提高了焊接效率。
- 还没有人留言评论。精彩留言会获得点赞!