一种焊枪示教夹具及焊接机器人的制作方法
本发明涉及工业焊接,具体涉及一种焊枪示教夹具及焊接机器人。
背景技术:
1、施工现场焊接机械手是一种自动化焊接设备,可以在建筑工地等现场进行焊接作业,提高焊接效率和质量,减少人力成本和安全风险。
2、焊接机械手通常由机械臂、焊枪、控制系统等组成,机械臂可以根据预设的程序自动移动和旋转,焊枪可以完成各种复杂的焊接操作,控制系统可以对焊接参数进行调整和监控,确保焊接质量和安全。
3、在焊接前,需要操作人员拖拽机械臂使焊枪内的焊丝按照焊接路径进行移动,将焊接数据传输给控制系统,才能进行自动焊接,但是操作人员拖拽机械臂移动时各个方向的力度很难保持不变,容易出现拖拽路径与焊接路径不一致的情况,导致焊接质量下降。
技术实现思路
1、因此,本发明要解决的技术问题在于克服现有技术中的操作人员拖拽机械臂移动时各个方向的力度很难保持不变,容易出现拖拽路径与焊接路径不一致的情况,导致焊接质量下降的缺陷,从而提供一种焊枪示教夹具及焊接机器人。
2、为了解决上述技术问题,本发明提供一种焊枪示教夹具,包括:轴套,用于安装在焊枪上;
3、限位件,安装在所述轴套上,所述限位件上具有用于与焊接工件进行抵接的限位面。
4、可选地,所述限位件为梯形板,通过所述梯形板的斜边形成所述限位面。
5、可选地,所述梯形板上具有沿宽度方向贯穿所述梯形板的通槽。
6、可选地,所述通槽的形状与所述梯形板的形状相同。
7、可选地,所述限位件可拆卸地安装在所述轴套上。
8、可选地,所述限位件通过插接安装在所述轴套上。
9、可选地,所述限位件上具有向外伸出的卡块,所述轴套上具有与所述卡块相配合的卡槽。
10、可选地,所述轴套的中心位置具有圆形的安装腔,所述焊枪设置在所述安装腔内。
11、可选地,所述轴套内活动设置有可沿径向进行移动的若干弧形片,通过所述弧形片的移动以改变所述安装腔的直径,从而调节所述限位件的角度。
12、可选地,所述弧形片转动设置在所述轴套内,所述弧形片具有沿周向间隔分布的四个。
13、可选地,若干个所述弧形片与所述轴套的内壁之间形成环形槽,所述环形槽内滑动设置有内侧面为锥形的调节套,通过所述调节套的移动以使若干个所述弧形片相互靠近或远离。
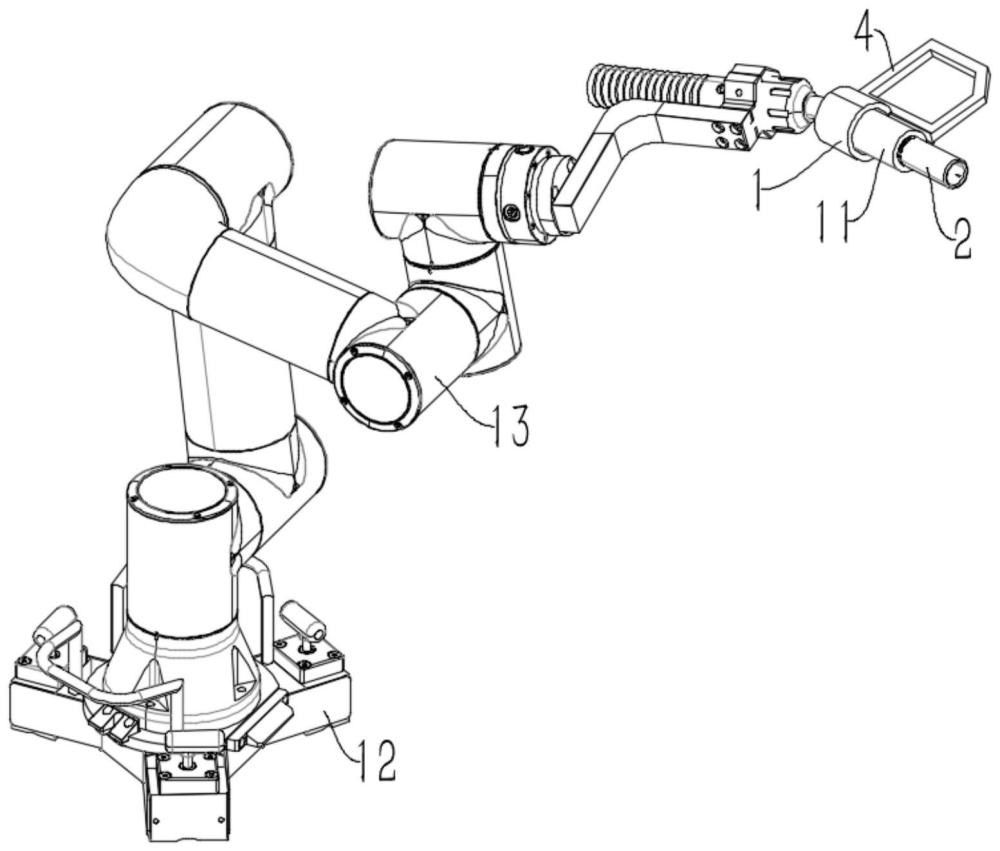
14、一种焊接机器人,包括:磁吸底座、焊接机械臂以及上述方案中任一项所述的焊枪示教夹具,所述焊接机械臂安装在所述磁吸底座上;
15、所述焊接机械臂的头部连接有焊枪,所述焊枪示教夹具的轴套安装在所述焊枪上。
16、本发明技术方案,具有如下优点:
17、1.本发明提供的焊枪示教夹具,限位件通过轴套安装在焊枪上,限位件上的限位面与焊接工件抵接,操作人员拖拽机械臂移动时,此时限位面与焊接工件滑动接触,焊接工件通过限位件对机械臂形成反作用力,与操作人员对机械臂施加的偏移焊接路径的推力相互抵消,确保拖拽路径与焊接路径保持一致,保证焊接质量。
18、2.本发明提供的焊枪示教夹具,通过将限位件可拆卸地安装在轴套上,当限位件出现磨损或者损坏的情况,便于对限位件进行更换,并且在示教完毕后,可将限位件取下,避免在焊接过程中限位件与焊接工件发生碰撞。
19、3.本发明提供的焊枪示教夹具,通过安装腔内弧形片的移动来改变安装腔的直径,即可改变限位件在焊枪上的角度,便于根据焊接工件的位置状态调整限位件的角度,无需移动机械臂即可将限位件上的限位面与焊接工件进行抵接,使用更加方便。
20、4.本发明提供的焊接机器人,通过使用上述的焊枪示教夹具进行示教,能够避免操作人员拖拽机械臂移动时与焊接路径发生偏移,确保焊接机器人的焊接质量。
技术特征:
1.一种焊枪示教夹具,其特征在于,包括:
2.根据权利要求1所述的焊枪示教夹具,其特征在于,所述限位件为梯形板(4),通过所述梯形板(4)的斜边形成所述限位面(3)。
3.根据权利要求2所述的焊枪示教夹具,其特征在于,所述梯形板(4)上具有沿宽度方向贯穿所述梯形板(4)的通槽(5)。
4.根据权利要求3所述的焊枪示教夹具,其特征在于,所述通槽(5)的形状与所述梯形板(4)的形状相同。
5.根据权利要求1所述的焊枪示教夹具,其特征在于,所述限位件可拆卸地安装在所述轴套(1)上。
6.根据权利要求5所述的焊枪示教夹具,其特征在于,所述限位件通过插接安装在所述轴套(1)上。
7.根据权利要求6所述的焊枪示教夹具,其特征在于,所述限位件上具有向外伸出的卡块(6),所述轴套(1)上具有与所述卡块(6)相配合的卡槽(7)。
8.根据权利要求1-7中任一项所述的焊枪示教夹具,其特征在于,所述轴套(1)的中心位置具有圆形的安装腔(8),所述焊枪(2)设置在所述安装腔(8)内。
9.根据权利要求8所述的焊枪示教夹具,其特征在于,所述轴套(1)内活动设置有可沿径向进行移动的若干弧形片(9),通过所述弧形片(9)的移动以改变所述安装腔(8)的直径,从而调节所述限位件的角度。
10.根据权利要求9所述的焊枪示教夹具,其特征在于,所述弧形片(9)转动设置在所述轴套(1)内,所述弧形片(9)具有沿周向间隔分布的四个。
11.根据权利要求9所述的焊枪示教夹具,其特征在于,若干个所述弧形片(9)与所述轴套(1)的内壁之间形成环形槽(10),所述环形槽(10)内滑动设置有内侧面为锥形的调节套(11),通过所述调节套(11)的移动以使若干个所述弧形片(9)相互靠近或远离。
12.一种焊接机器人,其特征在于,包括:磁吸底座(12)、焊接机械臂(13)以及权利要求1-11中任一项所述的焊枪示教夹具,所述焊接机械臂(13)安装在所述磁吸底座(12)上;
技术总结
本发明提供一种焊枪示教夹具及焊接机器人,属于工业焊接技术领域,包括:轴套以及限位件,轴套安装在焊枪上,限位件安装在轴套上,限位件上具有用于与焊接工件进行抵接的限位面,示教时,焊枪内焊丝的末端对准焊缝,限位件的限位面与焊接工件内侧面滑动抵接;本发明的限位件通过轴套安装在焊枪上,限位件上的限位面与焊接工件抵接,操作人员拖拽焊接机械臂移动时,此时限位面与焊接工件滑动接触,焊接工件通过限位件对焊接机械臂形成反作用力,与操作人员对焊接机械臂施加的偏移焊接路径的推力相互抵消,确保拖拽路径与焊接路径保持一致,保证焊接质量。
技术研发人员:陈振明,刘国栋,陈春国,肖运通,张燕鑫,汪博华,黄潇
受保护的技术使用者:中建钢构股份有限公司
技术研发日:
技术公布日:2024/2/29
- 还没有人留言评论。精彩留言会获得点赞!