一种CLOOS焊接机器人可调节防倒装夹工装的制作方法
一种cloos焊接机器人可调节防倒装夹工装
1.技术领域:
2.本实用新型属于机械加工领域,具体涉及一种cloos焊接机器人可调节防倒装夹工装。
3.
背景技术:
4.目前由于cloos焊接平台上定位的方式为孔定位,且孔数较少、孔距较大,大多为简单轴类定位辅助工装,且存在x、y、z、α、β、γ六个自由度方向只能定位一个自由度,使用不方便,且存在笨重,在机器人焊接过程中有可能与机械臂干涉。装夹定位可能存在平台有误差的时候,工装无法调节误差,通过简单地垫板厚来调节位置,费事费力而且误差大。
5.
技术实现要素:
6.为了克服上述技术问题,本实用新型提供一种焊接机器人可调节防倒装夹工装,结构简单,安装方便。
7.一种cloos焊接机器人可调节防倒装夹工装,所述的防倒装夹工装包括丝杠、定位套、第一丝杆、十字螺纹套筒、六角螺母、夹块滑道、夹块、固定螺母和第二丝杆;所述的丝杠和第一丝杆采用十字螺纹套筒垂直配装,丝杠配装的十字螺纹套筒上下两端采用六角螺母固定,所述的定位套固定配装在丝杆的一端,通过丝杠与定位套之间的固定关系,可以将丝杠定位在cloos焊接机器人平台上;所述的夹块滑道通过六角螺母配装在第一丝杆的一端,所述的夹块配装在夹块滑道中,夹块滑道两端的侧壁上分别设置有挡板,挡板上开设有螺纹孔,所述的螺纹孔上配装有第二丝杆,第二丝杆的一端配装有六角螺母,采用六角螺母和第二丝杆旋转使得夹块在夹块滑道移动。
8.优选的,所述的第一丝杆未配装夹块滑道的一端设置有销钉,通过旋转销钉从而调节第一丝杆的转动角度。
9.优选的,所述的夹块滑道为燕尾槽形状。
10.优选的,所述的夹块滑道采用螺纹与第一丝杆的一端配装。
11.本实用新型结构简单,通过工装本身可调节自由度来方便的定位装夹结构件。可实现可调节高度以及相对机器人的笛卡尔坐标系x、y、z及β、γ五个自由度都可调节。通过设置丝杠、第一丝杆以及夹块滑道、夹块组合配装可实现x、y、z及β、γ五个自由度方向的自由调节,使用方便。还能在立焊的时候起防倒作用,具有使用灵活安全方便的作用。
12.附图说明:
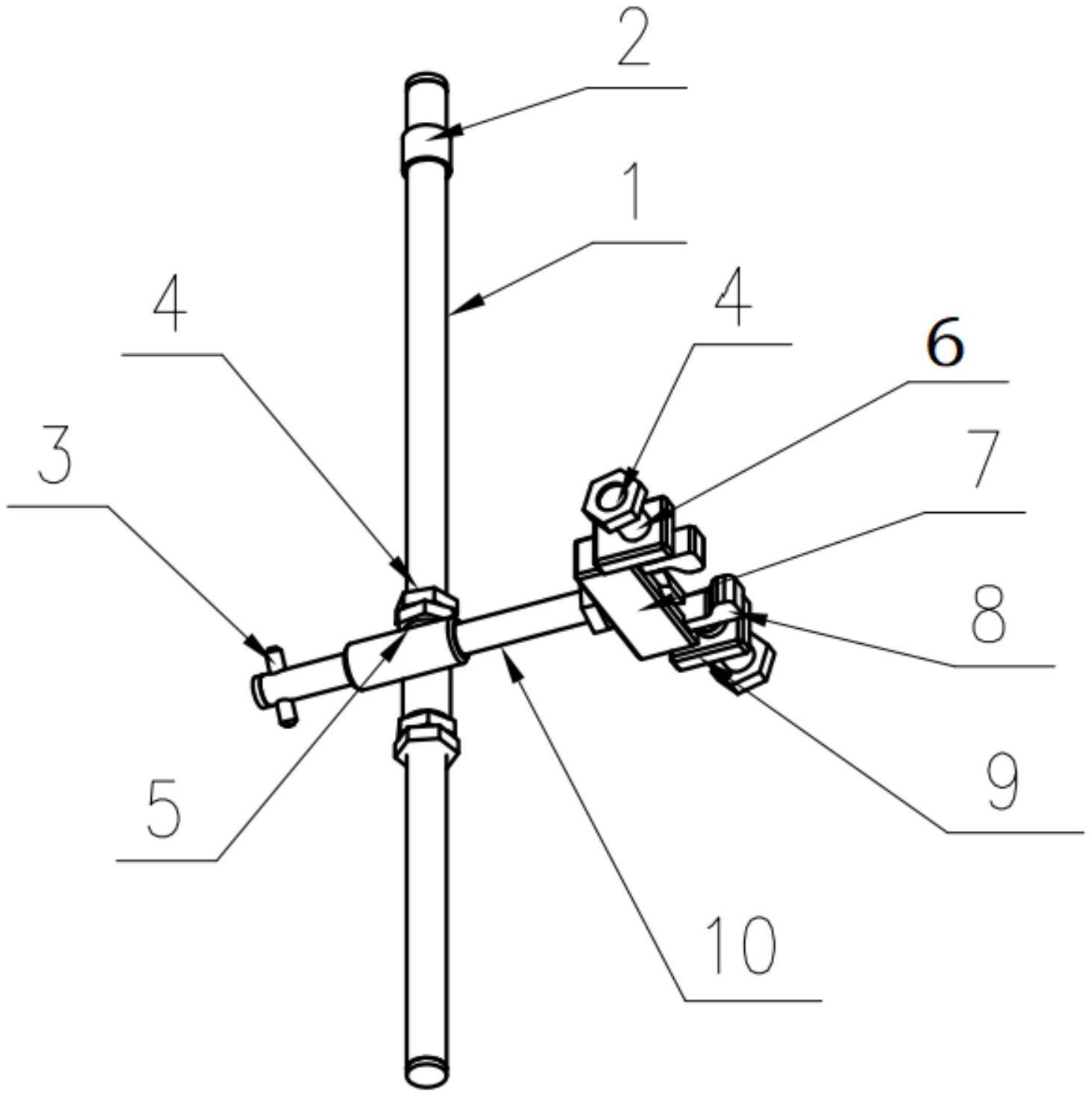
13.图1为本实用新型结构示意图。
14.图中,丝杠1、定位套2、销钉3、六角螺母4、十字螺纹套筒5、第二丝杆6、夹块滑道7、夹块8、挡板9、第一丝杆10。
15.具体实施方式:
16.如图1所示,一种cloos焊接机器人可调节防倒装夹工装,防倒装夹工装包括丝杠、定位套、第一丝杆、十字螺纹套筒、六角螺母、夹块滑道、夹块、固定螺母和第二丝杆;丝杠和第一丝杆采用十字螺纹套筒垂直配装,丝杠配装的十字螺纹套筒上下两端采用六角螺母固定,定位套固定配装在丝杆的一端,通过丝杠与定位套之间的固定关系,可以将丝杠定位在
cloos焊接机器人平台上;夹块滑道通过六角螺母配装在第一丝杆的一端,夹块配装在夹块滑道中,夹块滑道两端的侧壁上分别设置有挡板,挡板上设置有螺纹通孔,螺纹通孔上配装有第二丝杆,第二丝杆的一端配装有六角螺母,采用六角螺母和第二丝杆旋转使得夹块在夹块滑道移动。
17.其中,第一丝杆未配装夹块滑道的一端设置有销钉,通过旋转销钉从而调节第一丝杆的转动角度,夹块滑道为燕尾槽形状。夹块滑道采用螺纹与第一丝杆的一端配装。
18.工作原理:cloos焊接机器人可调节防倒装夹工装通过丝杠与第一丝杠一端的定位套之间的固定关系,可以将第一丝杠定位在cloos焊接机器人平台上。通过第一丝杠和十字螺纹套筒之间的螺纹配合可以调节高度以及角度方向γ两个自由度。通过手动借助于销钉旋转第一丝杆,使得y方向距离可以调节,使其靠近工件。通过夹块滑道与第一丝杆的螺纹配合与旋转关系可以定位y及β方向两个自由度。通过旋转六角螺母和第二丝杆使得夹块在夹块滑道燕尾槽里面移动,两方向配合夹紧,挡板用于固定在夹块滑道两端,内螺纹配合丝杆进行收缩夹紧运动。此机构可以定位x方向自由度。
技术特征:
1.一种cloos焊接机器人可调节防倒装夹工装,其特征在于:所述的防倒装夹工装包括丝杠、定位套、第一丝杆、十字螺纹套筒、六角螺母、夹块滑道、夹块、固定螺母和第二丝杆;所述的丝杠和第一丝杆采用十字螺纹套筒垂直配装,丝杠配装的十字螺纹套筒上下两端采用六角螺母固定,所述的定位套固定配装在丝杆的一端,通过丝杠与定位套之间的固定关系,可以将丝杠定位在cloos焊接机器人平台上;所述的夹块滑道通过六角螺母配装在第一丝杆的一端,所述的夹块配装在夹块滑道中,夹块滑道两端的侧壁上分别设置有挡板,挡板上开设有螺纹孔,所述的螺纹孔上配装有第二丝杆,第二丝杆的一端配装有六角螺母,采用六角螺母和第二丝杆旋转使得夹块在夹块滑道移动。2.根据权利要求1所述的一种cloos焊接机器人可调节防倒装夹工装,其特征在于:所述的第一丝杆未配装夹块滑道的一端设置有销钉,通过旋转销钉从而调节第一丝杆的转动角度。3.根据权利要求1所述的一种cloos焊接机器人可调节防倒装夹工装,其特征在于:所述的夹块滑道为燕尾槽形状。4.根据权利要求1所述的一种cloos焊接机器人可调节防倒装夹工装,其特征在于:所述的夹块滑道采用螺纹与第一丝杆的一端配装。
技术总结
本实用新型属于机械加工领域,具体涉及一种CLOOS焊接机器人可调节防倒装夹工装;本实用新型结构简单,防倒装夹工装包括丝杠、定位套、第一丝杆、十字螺纹套筒、六角螺母、夹块滑道、夹块、固定螺母和第二丝杆;通过工装本身可调节自由度来方便的定位装夹结构件。可实现可调节高度以及相对机器人的笛卡尔坐标系X、Y、Z及β、γ五个自由度都可调节。通过设置丝杠、第一丝杆以及夹块滑道、夹块组合配装可实现X、Y、Z及β、γ五个自由度方向的自由调节,使用方便。还能在立焊的时候起防倒作用,具有使用灵活安全方便的作用。活安全方便的作用。活安全方便的作用。
技术研发人员:强小东 程记胜 刘肖利 李华中 黄长龙
受保护的技术使用者:天地宁夏支护装备有限公司
技术研发日:2023.05.19
技术公布日:2023/10/13
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1