一种基于计算机控制的教学焊接机器人
本技术属于焊接机器人领域,具体地说是一种基于计算机控制的教学焊接机器人。
背景技术:
1、机器人焊接具有提高生产率、保证焊接质量、降低工人劳动强度等优点,所以越来越多的工厂已经开始采用机器人来完成焊接。因此,开展机器人焊接教学将成为一种发展趋势。
2、中国专利cn108247248a公开了一种基于计算机控制的教学焊接机器人,通过使用滚珠丝杠装置,相比现在拥有固定底座的焊接机器人,其工作范围大大增强;上述焊接机器人虽然采用了滚珠丝杠装置提升了其工作范围,但是在实际使用时,工作范围还是较小,而且在移动时所耗费的时间较长,会影响工作效率。
3、为此,本领域技术人员提出了一种基于计算机控制的教学焊接机器人来解决背景技术提出的问题。
技术实现思路
1、为了解决上述技术问题,本实用新型提供一种基于计算机控制的教学焊接机器人,以解决现有技术中焊接机器人虽然采用了滚珠丝杠装置提升了其工作范围,但是在实际使用时,工作范围还是较小,而且在移动时所耗费的时间较长,会影响工作效率等问题。
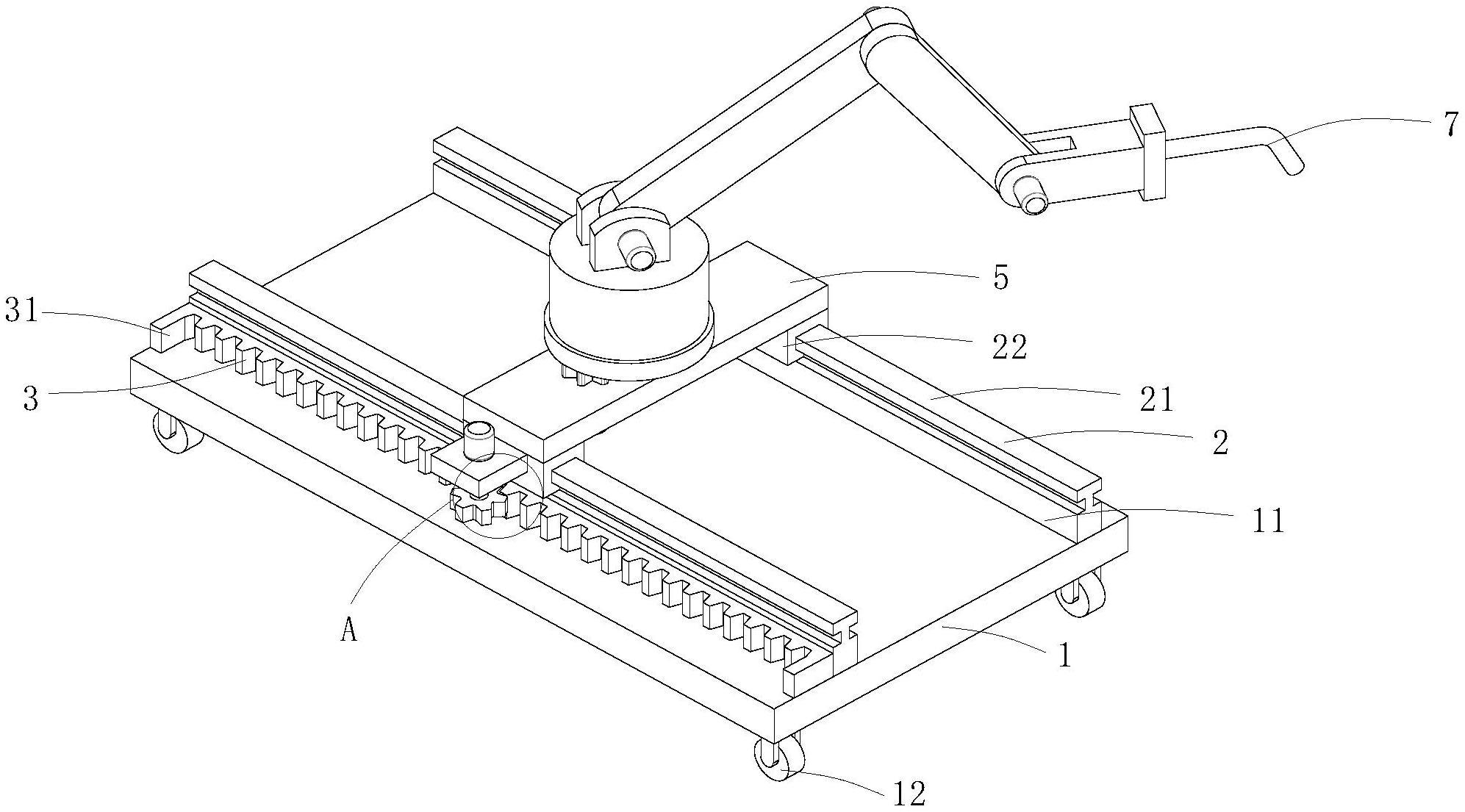
2、一种基于计算机控制的教学焊接机器人,包括底板,所述底板上表面固定连接有两个对称设置的矩形块;
3、移动机构,所述移动机构包括分别固定连接在两个矩形块上表面的两个滑轨,两个所述滑轨周侧面均滑动连接有滑块,两个所述滑块上表面固定连接有移动板,其中一个所述矩形块侧面固定连接有齿条,其中一个所述滑块侧面固定连接有安装板,所述安装板上表面固定连接有移动电机,所述移动电机输出端固定连接有连接轴,所述连接轴周侧面固定连接有第一齿轮,所述第一齿轮与齿条啮合;
4、旋转机构,所述旋转机构包括固定连接有在移动板下表面的旋转电机,所述旋转电机输出端固定连接有固定轴,所述固定轴周侧面固定连接有主动齿轮,所述主动齿轮啮合连接有从动齿轮,所述从动齿轮内部固定连接有转动轴,所述转动轴顶部固定连接有焊接机器人本体。
5、优选的,所述齿条两端均固定连接有挡板。
6、优选的,所述主动齿轮半径小于从动齿轮。
7、优选的,所述底板下表面安装有若干万向轮。
8、优选的,所述焊接机器人本体包括转盘,所述转盘与转动轴顶部固定连接,所述转盘上表面固定连接有底座,所述底座上表面固定连接有安装架,所述安装架内铰接有大臂,所述大臂远离安装架的一端铰接有小臂,所述小臂远离大臂的一端铰接有摆臂,所述摆臂一端固定连接有焊枪。
9、与现有技术相比,本实用新型具有如下有益效果:
10、1、本实用新型通过设置移动机构和旋转机构,可以通过旋转机构和移动机构快速调整焊接机器人本体的位置,使焊接机器人本体快速到达工作位置,避免长时间等待调节位置所浪费的时间,从而提高工作效率,而且可以提高焊接机器人的灵活性和适用性,更加适应不同工件的需求。
11、2、本实用新型通过设置移动电机和旋转电机,移动电机转动可以带动第一齿轮转动,配合第一齿轮与齿条啮合连接的设置,进而可以使第一齿轮沿着齿条移动,使滑轨沿着滑块移动,最终可以调节焊接机器人本体的位置;旋转电机转动可以带动从动齿轮转动,进而可以带动焊接机器人本体转动。
技术特征:
1.一种基于计算机控制的教学焊接机器人,其特征在于:包括,
2.如权利要求1所述一种基于计算机控制的教学焊接机器人,其特征在于:所述齿条(3)两端均固定连接有挡板(31)。
3.如权利要求1所述一种基于计算机控制的教学焊接机器人,其特征在于:所述主动齿轮(62)半径小于从动齿轮(64)。
4.如权利要求1所述一种基于计算机控制的教学焊接机器人,其特征在于:所述底板(1)下表面安装有若干万向轮(12)。
5.如权利要求1所述一种基于计算机控制的教学焊接机器人,其特征在于:所述焊接机器人本体(7)包括转盘(71),所述转盘(71)与转动轴(63)顶部固定连接,所述转盘(71)上表面固定连接有底座(72),所述底座(72)上表面固定连接有安装架(73),所述安装架(73)内铰接有大臂(74),所述大臂(74)远离安装架(73)的一端铰接有小臂(75),所述小臂(75)远离大臂(74)的一端铰接有摆臂(76),所述摆臂(76)一端固定连接有焊枪(77)。
技术总结
本技术属于焊接机器人领域,提供了一种基于计算机控制的教学焊接机器人,包括底板,底板上表面固定连接有两个对称设置的矩形块;移动机构,移动机构包括分别固定连接在两个矩形块上表面的两个滑轨,两个滑轨周侧面均滑动连接有滑块,两个滑块上表面固定连接有移动板,其中一个矩形块侧面固定连接有齿条,其中一个滑块侧面固定连接有安装板;本技术通过设置移动机构和旋转机构,可以通过旋转机构和移动机构快速调整焊接机器人本体的位置,使焊接机器人本体快速到达工作位置,避免长时间等待调节位置所浪费的时间,从而提高工作效率,而且可以提高焊接机器人的灵活性和适用性,更加适应不同工件的需求。
技术研发人员:徐晓晖,吴立华
受保护的技术使用者:潍坊科技学院
技术研发日:20230609
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!