注射装置以及成型机的制作方法
1.本公开涉及一种注射装置以及成型机。成型机例如是压铸机或注射成型机。
背景技术:
2.已知有通过注射缸(液压缸)驱动将成型材料推出到模具中的柱塞的注射装置(例如专利文献1~7)。注射缸具有缸体部、收容在缸体部中的活塞、固定在活塞上并向缸体部的外部延伸出的活塞杆。而且,活塞杆的前端与柱塞的后端连结。缸体部的内部被活塞划分为活塞杆延伸侧的杆侧室和其相反侧的头侧室。通过将工作液供给到头侧室,活塞前进,进而柱塞也前进。另外,通过将工作液供给到杆侧室,活塞后退,进而柱塞也后退。
3.杆侧室经由方向控制阀等阀与箱连接。通过使杆侧室与箱连通,例如,伴随着活塞的前进而从杆侧室排出的工作液被贮存在箱中。另外,通过使杆侧室和箱阻断,例如,由于活塞的后退而供给到杆侧室的工作液不会白白地排出到箱中。
4.杆侧腔也存在经由所谓的循环回路与头侧室连接的情况。杆侧室和头侧室经由循环回路而连通,由此,将伴随着活塞的前进而从杆侧室排出的工作液向头侧室供给,能够减少活塞的前进所需的工作液。在循环回路中设置有方向控制阀等阀,通过该阀的控制,进行杆侧室和头侧室的连通以及阻断(循环回路的接通以及断开)。
5.杆侧室与箱的连通和杆侧室与头侧室的连通(循环回路的接通)择一地进行。例如,在使柱塞前进而将成型材料向模具内推出的低速注射工序以及高速注射工序中,杆侧室和箱被阻断,循环回路被接通。由此,例如能够得到上述的工作液的减少的效果。另外,在使通过柱塞赋予模具内的成型材料的压力(注射压力)上升的升压工序中,杆侧室和箱被连通,循环回路被断开。由此,例如,能够充分降低杆侧室的压力,增大从柱塞赋予成型材料的压力。
6.在专利文献2中,指出了杆侧室与箱的连通以及阻断、循环回路的接通以及断开通过不同的阀进行的不良情况。而且,在专利文献2中,提出了通过一个方向控制阀进行杆侧室与箱的连通以及阻断、循环回路的接通以及断开的方案。
7.所谓的出口节流回路和/或入口节流回路在注射缸的速度的控制中被使用。出口节流回路通过流量控制阀(例如伺服阀)控制伴随着活塞的前进而从杆侧室排出的工作液的流量。入口节流回路通过流量控制阀(例如伺服阀)控制向头侧室供给的工作液的流量。
8.现有技术文献
9.专利文献
10.专利文献1:日本特开平10
‑
052747号公报
11.专利文献2:日本特开平10
‑
052748号公报
12.专利文献3:日本特开平10
‑
080760号公报
13.专利文献4:日本特开平10
‑
249510号公报
14.专利文献5:日本特开昭63
‑
154253号公报
15.专利文献6:日本特开2004
‑
276071号公报
16.专利文献7:国际公开第95/30094号
技术实现要素:
17.发明要解决的课题
18.杆侧室和箱的连通以及阻断、循环回路的接通以及断开、以及从杆侧室排出的工作液的流量的控制彼此密切地关联。但是,对于以简单的结构实现这些、或有效地进行这些动作,很难说进行了充分的研究。因此,希望提供一种能够适当地进行这些工作液的流动的控制的注射装置以及成型机。
19.用于解决课题的方案
20.本公开的一个方式的注射装置具有:注射缸,其驱动将成型材料向模具内推出的柱塞;循环回路,其伴随着所述注射缸的活塞的前进,使从所述注射缸的杆侧室排出的工作液向所述注射缸的头侧室流入;箱,其接收伴随着所述活塞的前进而从所述杆侧室排出的工作液;伺服阀,其设置在所述循环回路中并且与所述箱连接;所述伺服阀能够在允许从所述杆侧室向所述头侧室的流动并且禁止从所述杆侧室向所述箱的流动的第一状态、和禁止从所述杆侧室向所述头侧室的流动并且允许从所述杆侧室向所述箱的流动的第二状态之间切换,且能够分别在所述第一状态以及所述第二状态下控制从所述杆侧室排出的工作液的流量。
21.在一个例子中,所述伺服阀能够在所述第一状态、所述第二状态、和禁止从所述杆侧室向所述头侧室以及所述箱的任一方的流动的第三状态之间切换。
22.在一个例子中,所述伺服阀具有中空状的阀主体和能够在所述阀主体内移动的阀体,所述阀主体具有与所述杆侧室连通的杆侧口、与所述头侧室连通的头侧口、与所述箱连通的箱侧口,所述阀体能够在将所述杆侧口和所述头侧口连通并且将所述杆侧口和所述箱侧口阻断的位置、和将所述杆侧口和所述头侧口阻断并且将所述杆侧口和所述箱侧口连通的位置之间移动。
23.在一个例子中,所述伺服阀是具有作为阀主体的阀套筒和作为所述阀体的阀芯的滑阀,所述阀套筒的所述杆侧口、所述头侧口以及所述箱侧口在绕轴的内周面开口,所述阀芯在所述阀套筒内沿轴向滑动,所述头侧口相对于所述杆侧口位于所述轴向的一侧,所述箱侧口相对于所述杆侧口位于所述轴向的另一侧,所述阀芯具有:大径部,其具有相对于所述阀套筒滑动的径,能够封堵所述杆侧口的整体;头侧小径部,其相对于所述大径部位于所述一侧,径比所述大径部小,通过与所述杆侧口以及所述头侧口对置而能够将两者连通;箱侧小径部,其相对于所述大径部位于所述另一侧,径比所述大径部小,通过与所述杆侧口以及所述箱侧口对置而能够将两者连通。
24.在一个例子中,所述注射装置还具有止回阀,该止回阀在所述循环回路内位于所述头侧室和所述伺服阀之间,禁止从所述头侧室向所述伺服阀的流动,允许从所述伺服阀向所述头侧室的流动。
25.在一个例子中,所述注射装置还具有:注射控制部,其控制所述伺服阀,以使至少在低速注射工序以及高速注射工序的期间中成为所述第一状态;升压控制部,其控制所述伺服阀,以使至少在升压工序的期间中成为所述第二状态。
26.在一个例子中,所述注射装置具有:液压供给部,其包括液压源;保压控制部,其控
制所述液压供给部,以使在保压工序的期间中暂时地从所述液压源向所述杆侧室赋予液压。
27.在一个例子中,所述注射装置具有:蓄压器;acc用阀,其控制从所述蓄压器向所述头侧室的工作液的流动;液压供给部,其包括液压源;保压控制部,其控制所述acc用阀,以使以在保压工序的期间中从所述蓄压器向所述头侧室持续地赋予液压,且控制所述液压供给部,以使在保压工序的期间中暂时地从所述液压源向所述头侧室赋予液压。
28.在一个例子中,所述注射装置具有:蓄压器;acc用阀,其控制从所述蓄压器向所述头侧室的工作液的流动;液压供给部,其包括液压源;升压控制部,其控制所述acc用阀,以使在升压工序的期间中从所述蓄压器向所述头侧室赋予液压;保压控制部,其控制所述液压供给部,以使在保压工序的期间中的至少规定时刻以后从所述液压源向所述头侧室持续地赋予液压。
29.在一个例子中,所述注射装置还具有准备控制部,其控制所述液压供给部,以使在注射开始前从所述液压源向所述杆侧室赋予液压而使注射开始时的所述杆侧室的压力比所述箱的压力高。
30.本公开的成型机具有:上述注射装置;合模装置,其将所述模具合模;推出装置,其将成型品从所述模具推出。
31.发明效果
32.根据所述结构,能够适当地控制注射缸的工作液的流动。
附图说明
33.图1是示出具有本公开的实施方式的注射装置的压铸机的构造的示意图。
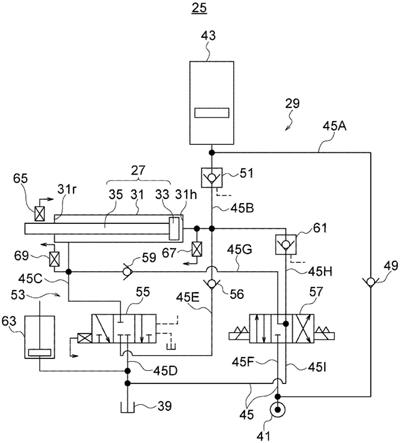
34.图2是示出实施方式的注射装置的注射驱动部的结构的示意图。
35.图3是示出图2的注射驱动部中的伺服阀的主要部分的结构的示意剖视图。
36.图4是示出实施方式的压铸机的信号处理系统的结构的框图。
37.图5是说明实施方式的注射装置的动作的图。
38.图6是示出实施方式的控制装置执行的注射处理的顺序的一例的流程图。
39.图7是示出实施方式的铸造周期中的多个阀的动作的时间表。
40.图8是示出实施方式的控制装置执行的升压/保压处理的顺序的一例的流程图。
具体实施方式
41.(压铸机的整体结构)
42.图1是示出本公开的实施方式的压铸机1的主要部分的结构的、部分地包括剖视图的侧视图。需要说明的是,纸面上下方向为垂直方向,纸面左右方向以及纸面贯通方向为水平方向。
43.压铸机1将未硬化状态的金属材料向模具101的内部(型腔ca等空间。以下相同。)注射,使金属材料在模具101内凝固,由此制造压铸件(成型品)。未固化状态例如为液态或固液共存状态。固液共存状态为从液态进行了凝固的半凝固状态、或从固态进行了熔融的半熔融状态。金属例如是铝或铝合金。需要说明的是,以下,作为未固化的金属材料,基本上以熔液(液态的金属材料)为例。
44.模具101例如包括固定模具103以及移动模具105。在本实施方式的说明中,为了方便,用一种阴影线表示固定模具103或移动模具105的截面,但这些模具可以是直雕式的模具,也可以是镶套式的模具。另外,也可以在固定模具103以及移动模具105上,组合型芯等。
45.压铸机1例如具有进行用于成型的机械动作的机主体3和控制机主体3的动作的控制单元5。
46.机主体3例如具有进行模具101的开闭以及合模的合模装置7、将熔液注射到模具101内的注射装置9、将压铸品从固定模具103或移动模具105(图1中为移动模具105)推出的推出装置11。在机主体3中,注射装置9以外的结构(例如合模装置7以及推出装置11的结构)可以与公知的各种结构相同。
47.在成型周期中,合模装置7使移动模具105朝向固定模具103移动,进行闭模。进而,合模装置7对模具101赋予与连接杆(省略附图标记)的伸长量对应的合模力来进行合模。在合模后的模具101内构成与成型品相同形状的型腔ca。注射装置9向该型腔ca注射/填充熔液。填充在型腔ca中的熔液被模具101夺去热量而被冷却、凝固。由此,形成成型品。之后,合模装置7使移动模具105向离开固定模具103的方向移动而进行开模。此时,或者之后,推出装置11从移动模具105将成型品推出。
48.控制单元5例如具有进行各种运算并输出控制指令的控制装置13(参照图4)、接受操作者的输入操作的输入装置17、显示图像的显示装置15。另外,在另一观点中,控制单元5具有例如具有电源电路以及控制电路等的未图示的控制盘和作为用户接口的操作部19。
49.控制装置13例如设置在未图示的控制盘以及操作部19上。控制装置13可以适当地分割或分散而构成。例如,控制装置13可以包括以下而构成:每个合模装置7、注射装置9以及推出装置11的下位的控制装置、和进行实现该下位的控制装置间的同步等控制的上位的控制装置。
50.显示装置15以及输入装置17例如设置在操作部19上。在图示的例子中,操作部19设置在合模装置7的固定模板(省略符号)上。显示装置15例如由包括液晶显示显示器或有机el显示器的触摸面板构成。输入装置17例如由机械式的开关以及上述的触摸面板构成。
51.(注射装置的整体结构)
52.注射装置9例如具有与模具101内连通的注射套筒21、能够在注射套筒21内滑动的柱塞23、驱动柱塞23的注射驱动部25。需要说明的是,在注射装置9的说明中,有时将模具101侧称为前方,将其相反侧称为后方。
53.注射套筒21例如是与固定模具103连结的筒状部件,在上表面开口有用于将熔液接受到注射套筒21内的供给口21a。柱塞23例如具有可在注射套筒21内沿前后方向滑动的柱塞顶端23a和前端固定在柱塞顶端上的柱塞杆23b。
54.当基于合模装置7的模具101的合模完成时,利用未图示的热液供给装置将1注量的熔液从供给口21a向注射套筒21内注入。然后,柱塞23从图示的位置在注射套筒21内向前方滑动,由此注射套筒21内的熔液被推出(注射)到模具101内。
55.(注射驱动部)
56.图2是示出注射装置9的注射驱动部25的结构的示意图。
57.注射驱动部25例如为液压式的注射驱动部,具有驱动柱塞23的注射缸27和对注射缸27进行工作液(例如油)的供给等的液压装置29。
58.(注射缸)
59.注射缸27例如由所谓的单筒型的液压缸构成。具体而言,例如,注射缸27具有缸体部31、能够在缸体部31的内部滑动的活塞33、固定于活塞33并从缸体部31延伸出的活塞杆35。
60.缸体部31例如大致是内部的截面形状为圆形的筒状体。缸体部31的内部被活塞33划分为活塞杆35伸出侧的杆侧室31r和其相反侧的头侧室31h。通过有选择地将工作液供给到头侧室31h以及杆侧室31r,活塞33在缸体部31内沿前后方向滑动。
61.注射缸27相对于柱塞23同轴地配置。而且,如图1所示,活塞杆35的前端经由联轴器(省略附图标记)与柱塞23的后端连结。缸体部31相对于压铸机1的不动部分(例如合模装置7的固定模板)等固定设置。因此,通过活塞33相对于缸体部31的移动,柱塞23在注射套筒21内前进或后退。
62.(液压装置)
63.返回图2,液压装置29例如具有贮存工作液的箱39、送出工作液的泵41(液压源)、贮存高压的工作液的蓄压器43(液压源)。箱39、泵41、蓄压器43以及注射缸27通过多个流路45a~45i(以下,有时省略a~i。)连接。该多个流路45中的工作液的流动由多个阀(49、51、55、57、59以及61)控制。
64.需要说明的是,在图2中,为了便于图示,将箱39和泵41分开进行图示,但泵41也可以将贮存在箱39中的工作液送出。另外,为了便于图示,箱39被示出在两个位置(其中一个省略附图标记),但实际上箱39可以合并成一个。
65.(箱、泵以及蓄压器)
66.箱39例如是开放的箱,在大气压下保持工作液。将箱39内的工作液的压力称为箱压力。在开放箱中,工作液的压力近似(如果忽略工作液的自身重量的影响)等于大气压。当杆侧室31r或头侧室31h与箱39连接时,杆侧室31r或头侧室31h内的工作液的压力基本上为箱压。
67.泵41由电动机47(参照图4)驱动,将工作液送出。泵可以是旋转泵、柱塞泵、定容量泵、可变容量泵、单向泵、双向(两个方向)泵等适当的方式的泵。驱动泵41的电动机也可以是直流马达、交流马达、感应马达、同步马达、伺服马达等适当的方式的电动机。泵41(电动机)可以在压铸机1的运转中一直被驱动,也可以根据需要被驱动。
68.蓄压器43可以是适当的方式的蓄压器,例如是重量式、弹簧式、气压式(包括空气压式)、缸式或普拉达式的蓄压器。在图示的例子中,蓄压器43是缸式的蓄压器,没有特别标注附图标记,但具有缸体部和将缸体部划分为液体室和气体室的活塞。蓄压器43通过将工作液供给到液体室而被蓄压,能够将该蓄压后的比较高压的工作液放出到注射缸27。
69.(流路以及阀)
70.多个流路45可以由管、软管和/或其它部件(例如,形成有贯通孔的块状的部件)构成。另外,以下所述的多个流路45的一部分可以相互共用。基于多个流路45以及多个阀的液压装置29的构成要素(27、39、41以及43)的连接关系例如如下所述。
71.(与活塞的前进相关的流路以及阀)
72.泵41和蓄压器43经由流路45a连接。由此,例如,能够从泵41将工作液供给到蓄压器43而对蓄压器43进行蓄压。
73.在流路45a中,设置有止回阀49,该止回阀49允许从泵41向蓄压器43的流动,禁止其相反方向的流动。由此,防止从蓄压器43向泵41的逆流。
74.蓄压器43和头侧室31h经由流路45b连接。由此,例如,从蓄压器43向头侧室31h供给工作液,活塞33前进。
75.在流路45b中,设置有acc用阀51,该acc用阀51允许以及禁止从蓄压器43向头侧室31h的工作液的供给。acc用阀51的结构可以是适当的结构。在图示的例子中,acc用阀51由先导式的止回阀构成。该止回阀在未导入先导压时,禁止从蓄压器43向头侧室31h的流动,并且允许其相反方向的流动,在导入先导压时,允许双方的流动。
76.杆侧室31r和箱39能够经由与杆侧室31r连接的流路45c和与箱39连接的流路45d连接。由此,例如,能够在活塞33前进时从杆侧室31r向箱39排出工作液。
77.杆侧室31r和头侧室31h能够经由上述流路45c和与头侧室31h连接的流路45e连接。由此,例如,能够使伴随着活塞33的前进而从杆侧室31r排出的工作液向头侧室31h流入。进而,能够减少使活塞33前进时所需的工作液。这样,流路45c以及45e构成环绕回路53。
78.在流路45c~45e之间,夹设有伺服阀55。如在图2中由3口3位切换阀的附图标记表现伺服阀55那样,流路45c、45d以及45e的连接关系通过伺服阀55切换。具体而言,例如,在图示的三个矩形中的中央的位置,流路45c、45d以及45e相互阻断。在纸面左侧的位置,流路45c(杆侧室31r)和流路45d(箱39)被连接,并且流路45c和流路45e(头侧室)被阻断(环绕电路53被断开。)。在纸面右侧的位置,流路45c(杆侧室31r)和流路45d(箱39)被阻断,并且流路45c和流路45e(头侧室31h)被连接(环绕电路53被接通。)。
79.伺服阀55构成为能够控制从流路45c(杆侧室31r)向流路45d(箱39)或流路45e(头侧室31h)的工作液的流量,也作为流量控制阀发挥功能。通过该流量的控制,例如控制活塞33的前进速度。即,伺服阀55构成所谓的出口节流回路。需要说明的是,伺服阀55例如由即使有压力变动也能够将流量保持为恒定的带压力补偿的流量调整阀构成。另外,伺服阀55如其名称所示,由伺服阀构成,该伺服阀在伺服机构中使用,能够根据输入信号无级地(连续地、任意的值)调制流量。
80.用于驱动伺服阀55的阀体(后述)的结构可以是适当的结构,可以应用公知的各种结构。例如,驱动方式可以是电气
‑
液压式,也可以是电气式。在电气
‑
液压式中,与输入的电信号对应的螺线管(马达)的位移通过喷嘴挡板等前段放大部转换为先导压,通过该先导压驱动阀体。在电气式中,例如,与输入的电信号对应的螺线管的位移不经由液压地传递给阀体。另外,阀体也可以由弹簧施力,以使在未赋予由电气或液压产生的驱动力时位于规定位置。另外,用于输出与伺服阀55的阀体的位置对应的信号(反馈用的信号)的结构也可以是适当的结构,可以应用公知的各种结构。例如,可以使用差动变压器。
81.在流路45e中,设置有止回阀56,该止回阀56允许从伺服阀55向头侧室31h的流动,禁止其相反方向的流动。由此,例如,防止从头侧室31h向杆侧室31r的逆流。
82.(其他动作相关的流路以及阀)
83.泵41和杆侧室31r能够经由与泵41连接的流路45f和与杆侧室31r连接的流路45g连接。由此,例如,从泵41向杆侧室31r供给工作液,能够使活塞33后退。
84.头侧室31h和箱39能够经由与头侧室31r连接的流路45h和与箱39连接的流路45i连接。由此,例如,能够在活塞33后退时从头侧室31h向箱39排出工作液。
85.泵41和头侧室31h能够经由上述的流路45f和上述的流路45h连接。由此,例如,从泵41向头侧室31h供给工作液,能够使活塞33前进。
86.在流路45f~45i之间,夹设有切换阀57。如在图2中由4口3位切换阀的附图标记表现切换阀57那样,流路45f~45i的连接关系通过切换阀57切换。具体而言,例如,在图示的三个矩形中的中央的位置,流路45g(杆侧室31r)、流45h(头侧室31h)以及流路45i(箱39)相互连接。由此,例如,能够对注射缸体27进行减压。在纸面左侧的位置,流路45f(泵41)和流路45g(杆侧室31r)被连接,并且流路45h(头侧室)和流路45i(箱39)被连接。由此,例如能够使活塞33后退。在纸面右侧的位置,流路45f(泵41)和流路45h(头侧室31h)被连接,并且流路45g(头侧室31r)和流路45i(箱39)被连接。由此,例如能够使活塞33前进。需要说明的是,根据后述的说明可以理解,切换阀57也可以不有助于从杆侧室31r向箱39的工作液的排出。
87.在流路45g中,设置有止回阀59,该止回阀59允许从切换阀57向杆侧室31r的流动,禁止其相反方向的流动。由此,例如,在通过伺服阀55控制从杆侧室31r排出的工作液的流量时,能够禁止从杆侧室31r向切换阀57的流动。
88.在流路45h中,设置有控制阀61,该控制阀61允许以及禁止头侧室31h和切换阀57之间的流动。控制阀61的结构可以是适当的结构。在图示的例子中,控制阀61由先导式的止回阀构成。该止回阀在未导入先导压时,禁止从头侧室31h向切换阀57的流动,并且允许其相反方向的流动,在导入先导压时,允许双方的流动。控制阀61例如在从蓄压器43向头侧室31h供给工作液时,有助于阻止头侧室31h的工作液向切换阀57流动。
89.液压装置29具有背压除去缸63。在背压除去缸63中,由活塞划分的两个缸室中的一方与流路45d连接,另一方与未图示的空压源连接。因此,例如,在通过伺服阀55将杆侧室31r和箱39连接的状态下,在杆侧室31r的液压急剧升高的情况下,其冲击被背压除去缸63吸收。
90.(各种传感器)
91.注射装置9为了掌握注射驱动部25等的动作而具有各种传感器。例如,注射装置9具有用于检测活塞杆35(在另一观点中为柱塞23)的位置以及速度的位置传感器65、和用于检测液压系统的各种位置的液压的各种压力传感器。作为压力传感器,例如设置有检测头侧室31h的压力的头压传感器67、以及检测杆侧室31r的压力的杆压传感器69。除此之外,例如也可以设置检测蓄压器43的压力的压力传感器。
92.位置传感器65例如检测活塞杆35相对于缸体部31的位置,间接地检测柱塞23的位置。位置传感器65的结构可以是适当的结构。例如,位置传感器65可以与固定在活塞杆35上的未图示的标尺部一起构成磁式或光学式的线性编码器,也可以由计测与固定在活塞杆35上的部件的距离的激光测长器构成。
93.在概念上,位置传感器65或控制装置13可以通过柱塞23的位置的微分来取得(检测)柱塞23的速度。因此,位置传感器65可以理解为速度传感器。例如,在位置传感器65构成线性编码器的情况下,位置传感器65根据与未图示的标尺部的相对移动生成脉冲。而且,位置传感器65和/或控制装置13能够通过累计所生成的脉冲的数量来确定位置传感器65与标尺部的相对位置,另外,能够通过确定单位时间的脉冲的数量来确定速度。
94.头压传感器67以及杆压传感器69例如用于间接地检测柱塞23施加于熔液的压力(注射压力等)。例如,控制装置13能够基于头压传感器67的检测值、杆压传感器69的检测
值、活塞33的头侧室31h中的受压面积(从工作液受到压力的面积)、活塞33的杆侧室31r中的受压面积、柱塞23相对于熔液的接触面积,计算柱塞23赋予熔液的压力。需要说明的是,在以下的说明中,有时将基于这样的头压传感器67以及杆压传感器69(根据实施方式仅为头压传感器67)的检测值的注射压力仅简称为注射压力的检测值。
95.(伺服阀的构造)
96.图3是示出伺服阀55的主要部分的结构的示意剖视图。在该图中,仅示意性地示出伺服阀55中、直接地控制头侧室31h、杆侧室31r以及箱39之间的流动的部分。因此,例如,省略了与螺线管、先导流路和/或弹簧等的驱动相关的部分、与差动变压器等的反馈信号的生成相关的部分、以及规定阀体的驱动极限的部分等的图示。
97.伺服阀55由所谓滑阀式的阀构成,具有阀套筒71和能够在阀套筒71内沿轴向滑动的阀芯73。
98.阀套筒71是中空状的部件。阀套筒71的内部空间的横截面(与图3的左右方向正交的截面)的形状例如为大致圆形。在阀套筒71的内周面(绕轴的内表面),开口有将阀套筒71内外连通的、杆侧口75r、头侧口75h以及箱侧口75t。需要说明的是,在以下,有时仅称为“口75”,而不对它们进行区分。在图示的例子中,口75在阀套筒71的内表面的开口位置与阀套筒71的外表面的开口位置大致一致。但是,根据阀套筒71的形状,也可以使外表面的开口位置从内表面的开口位置错开。
99.在杆侧口75r上,连接有流路45c(杆侧室31r)。在头侧口75h上连接有流路45e(头侧室31h)。在箱侧口75t上连接有流路45d(箱39)。这些口75在阀芯73的移动方向(图3的左右方向)上按照头侧口75h、杆侧口75r、箱侧口75t的顺序配置。需要说明的是,这些口75的阀套筒71的绕轴的位置可以彼此相同(图示的例子),也可以彼此不同。
100.在阀套筒71的内周面上,也可以在轴向(阀芯73的移动方向)的、与口75对应的位置,形成有槽71a。在图示的例子中,在三个口75中、与头侧口75h以及杆侧口75r对应的位置设置有槽部71a。需要说明的是,槽71a可以不设置,也可以对三个口75的某一个设置。槽71a例如在阀套筒71的绕轴的方向上延伸,绕阀套筒71一周,并与口75连接(一部分或全部也可以理解为口75的一部分。)。
101.阀芯73例如形成为在圆柱中其轴向的两处缩径的形状。即,阀芯73具有三个大径部73a、73b以及73c、和位于它们之间且径比大径部小的两个小径部73d以及73e。大径部例如形成为在阀套筒71上滑动的大致圆柱状。小径部形成为外周面从阀套筒71的内表面离开的大致圆柱状。
102.通过使小径部与两个口75对置,该两个口75相互连通。另外,通过使大径部与某一个口75对置,该一个口75与其他口75阻断。另外,通过使大径部位于某两个口之间,该两个口75彼此阻断。在图示的例子中,具体而言,如下所述。
103.在图3中,中央的大径部73b与杆侧口75r对置。由此,杆侧口75r与头侧口75h以及箱侧口75t的双方阻断。另外,在另一观点中,大径部73b位于头侧口75h和箱侧口75t之间。由此,头侧口75h和箱侧口75t被阻断。该状态相当于伺服阀55的图2所示的附图标记的中央的位置(禁止从杆侧室31r的工作液的排出的状态)。
104.需要说明的是,小径部73d与头侧口75h(例如其整体)对置。小径部73e与箱侧口75t(例如其整体)对置。两侧的大径部73a以及73c有助于将小径部73d以及73e与阀套筒71
的两端部隔离。虽然未特别图示,但该阀套筒71的两端部用于设置驱动阀芯73的驱动部。
105.当阀芯73从图3的状态向图3的右侧移动时,左侧的小径部73d维持与头侧口75h的对置,并且与杆侧口75r的至少一部分对置。由此,头侧口75h和杆侧口75r被连通。该状态相当于伺服阀55的图2所示的附图标记的右侧的位置(使循环回路53接通的状态)。
106.在阀芯73向图3的右侧移动的过程中,左侧的小径部73d维持与头侧口75h的整体对置的状态,并且使与杆侧口75r对置的面积逐渐地增加。由此,实现用于控制在头侧口75h和杆侧口75r之间流动的工作液的流量的开口度的变化。小径部73d例如设为能够保持与头侧口75h的整体对置地移动到与杆侧口75r的整体对置的位置。此时,开口度成为最大。
107.需要说明的是,杆侧口75r和箱侧口75t的阻断通过在两者之间夹设大径部73b来维持。在图示的例子中,即使阀芯73移动到小径部73d与杆侧口75r的整体对置的位置,大径部73b也不与箱侧端口75t对置。但是,大径部73b也可以在阀住73移动到上述位置时,与箱侧口75t的一部分或全部对置。
108.与上述相反,当阀芯73从图3的状态向图3的左侧移动时,右侧的小径部73e维持与箱侧口75t的对置,并且与杆侧口75r的至少一部分对置。由此,箱侧口75t和杆侧口75r被连通。该状态相当于伺服阀55的图2所示的附图标记的左侧的位置。
109.在阀芯73向图3的左侧移动的过程中,右侧的小径部73e维持与箱侧口75t的整体对置的状态,并且使与杆侧口75r对置的面积逐渐地增加。由此,实现用于控制在箱侧口75t和杆侧口75r之间流动的工作液的流量的开口度的变化。但是,在图示的例子中,在小径部73e到达与杆侧口75r的整体对置的位置之前,小径部73e的与箱侧口75t对置的面积开始减小。将该之前的位置作为开口度最大的位置来处理,不进行从该位置进一步向左侧的阀芯73的移动。需要说明的是,伺服阀55也可以构成为,在小径部73e到达与杆侧口75r的整体对置的位置之前,维持小径部73e与箱侧口75t的整体对置的状态。
110.需要说明的是,杆侧口75r和头侧口75h的阻断通过在两者之间夹设大径部73b来维持。另外,在图示的例子中,大径部73b通过阀芯73向图3的左侧移动而与头侧端口75h的至少一部分对置。但是,大径部73b也可以不与头侧口75h对置。
111.(信号处理系统的结构)
112.图4是示出压铸机1的信号处理系统的结构的框图。
113.控制装置13例如由包括cpu、ram、rom及外部存储装置的计算机构成,虽然未特别图示。cpu通过执行存储在rom以及外部存储装置中的程序,构筑起承担各种控制乃至运算的多个功能部(13a~13f)。多个功能部例如包括准备控制部13a、低速注射控制部13b、高速注射控制部13c、减速控制部13d、升压控制部13e以及保压控制部13f。需要说明的是,有时将低速注射控制部13b以及高速注射控制部13c(以及减速控制部13d)统称为注射控制部13h。关于这些多个功能部进行的控制等的详细情况,在后述的动作的说明(图6等)中进行说明。
114.从各种设备将各种信号输入到控制装置13。将信号输入到控制装置13中的设备例如是输入装置17、位置传感器65、杆压传感器69以及头压传感器67。另外,控制装置13将控制信号输出到各种设备。控制装置13输出信号的设备例如是注射装置9的液压装置29。在此,示出液压装置29的构成要素中的、伺服阀55、驱动泵41的电动机47以及切换阀57。
115.如图4所示,液压装置29可以理解为具备液压供给部77。液压供给部77包括泵41
(图2)、电动机47、切换阀57以及控制阀61,向头侧室31h以及杆侧室31r供给工作液。该动作由控制装置13控制。
116.(注射装置的动作的概要)
117.图5是说明注射装置9的动作的图。图5的上部是示出注射速度(柱塞23的速度)以及注射压力(柱塞23赋予熔液的压力)的经时变化的曲线图。图5的下部是示出acc用阀51、伺服阀55以及液压供给部77的动作的时序图。
118.在图5中,横轴t表示时间。在图5的上部的曲线图中,纵轴表示注射速度v以及注射压力p的大小线lv表示注射速度的变化。线lp表示注射压力的变化。
119.图5的“acc用阀”项目中的线表示当位于“开”时,先导压力导入到acc用阀51,当位于“闭”时,先导压力不导入到acc用阀51。需要说明的是,在图示的范围内,acc用阀51在时刻0导入先导压力,然后,持续地导入先导压力。
120.图5的“伺服阀”的项目中的实线表示在位于虚线所示的位置时,位于图2的附图标记的中央的位置(禁止从杆侧室31r向头侧室31h以及箱39的流动的位置)。另外,上述实线表示当位于比虚线靠上方(“r
→
h”的位置)时,位于图2的附图标记的右侧的位置(允许从杆侧室31r向头侧室31h的流动的位置)。另外,上述实线表示当位于比虚线靠上方(“r
→
t”的位置)时,位于图2的附图标记的左侧的位置(允许从杆侧室31r向箱39的流动的位置)。另外,上述实线表示越远离虚线,开口度(在另一观点中为流量)越大。
121.图5的“液压供给部”的项目用于说明后述的变形例,表示与液压供给部77的实施方式中的动作不同的动作。因此,在此省略说明。
122.概观注射装置9,在每个铸造周期依次进行低速注射工序(时刻t0~t1)、高速注射工序(时刻t1~t2)、减速工序(时刻t2~t3)、升压(增压)工序(时刻t3~t5)以及保压工序(时刻t5~)。
123.低速注射工序(时刻t0~t1)是在注射的初始阶段使柱塞23以比较低速的低速注射速度v
l
前进的工序。通过这样以比较低的速度进行注射,例如可以减少熔液导致的气体(空气等)的卷入。低速注射速度v
l
的具体值可以通过对输入装置17的操作来适当地设定,例如,小于1m/s。
124.高速注射工序(时刻t1~t2)是继低速注射工序之后,使柱塞23以比低速注射速度v
l
高速的高速注射速度v
h
前进的工序。通过这样以比较高的速度进行注射,例如,能够不延迟熔液的凝固地将熔液填充到型腔ca中。高速注射速度v
h
的具体值可以通过对输入装置17的操作来适当地设定,例如,1m/s以上。
125.减速工序(时刻t2~t3)是减小柱塞23的速度的工序。通过进行减小柱塞23的速度的控制,例如,能够降低熔液填充到型腔ca中时产生的冲击(冲击压)。
126.升压工序(时刻t3~t5)是使通过柱塞23赋予熔液的压力上升,使熔液的压力达到规定的铸造压力pe的工序。保压工序(时刻t5~)是维持铸造压力pe,等待熔液的凝固的工序。通过使熔液的压力上升并等待凝固,例如能够减少铸件气孔和/或气孔等。铸造压力pe的具体值可以通过对输入装置17的操作来适当地设定。
127.acc用阀51例如从上述的低速注射工序到保压工序导入先导压而打开。由此,从蓄压器43向头侧室31h供给工作液,对活塞33施加向前进方向的力。进而,上述的各种工序成为可能。
128.而且,通过伺服阀55的动作,实现上述的各种工序的切换。具体而言,实现从低速注射工序向高速注射工序的切换(时刻t1)、从高速注射工序向减速工序的切换(时刻t2)、从减速工序向升压工序的切换(时刻t3)、从升压工序向保压工序的切换(时刻t5)。
129.(注射装置的动作的详细介绍)
130.除了图5之外,还参照图6以及图7,对注射装置9的动作的详细情况进行说明。图6是示出为了实现上述的注射装置的动作而由控制装置13执行的注射处理的顺序的一例的流程图。该处理在每个铸造周期中进行。另外,图7是示出铸造周期中的多个阀的动作的时间表。
131.在图7的“伺服阀”的栏中,“c”表示伺服阀55位于图2的附图标记的中央的位置(禁止从杆侧室31r向头侧室31h以及箱39的流动)。“r
→
h”表示伺服阀55位于图2的附图标记的右侧的位置(允许从杆侧室31r向头侧室31h的流动)。“r
→
t”表示伺服阀55位于图2的附图标记的左侧的位置(允许从杆侧室31r向箱39的流动)。
132.在“acc用阀”的栏中,
“‑”
表示先导压未导入到acc用阀51(禁止从蓄压器43向头侧室31h的流动)。“p”表示先导压导入到acc用阀51(允许从蓄压器43向头侧室31h的流动)。
133.在“控制阀”的栏中,
“‑”
表示先导压未导入到控制阀61(禁止从头侧室31h向切换阀57的流动)。“p”表示先导压导入到控制阀61(允许从头侧室43向切换阀57的流动)。
134.在“切换阀”的栏中,“c”表示切换阀57位于图2的附图标记的中央的位置(禁止从泵41向杆侧室31r以及杆侧室31h的流动)。“p
→
r”表示切换阀57位于图2的左侧的位置(允许从泵41向杆侧室31r的流动)。“p
→
h”表示伺服阀55位于图2的附图标记的右侧的位置(允许从泵41向头侧室31h的流动)。
135.(准备工序:时刻t0前)
136.如图6的步骤st1以及图7的“1”行所示,在注射开始前(图5的时刻t0前),进行准备工序。在该准备工序开始前,注射装置9成为图1以及图2所示的状态。即,柱塞23(活塞33)位于后退极限。液压装置29设为能够使活塞33位于后退极限的适当的状态。例如,在acc用阀51以及控制阀61中未导入先导压,伺服阀55关闭(图2的中央的位置),切换阀57将泵41从注射缸27阻断。
137.然后,在准备工序中,控制装置13(准备控制部13a)将切换阀57切换到图2的左侧的位置,从泵41将液压供给到杆侧室31r,使杆侧室31r的压力上升。由此,在注射开始时(时刻t0),降低了产生所谓的跳变的可能性。具体而言,如下所述。
138.如上所述,向头侧室31h供给工作液而使活塞33前进时,其速度由从杆侧室31r排出的工作液的流量控制。理论上,活塞33的速度由从杆侧室31r排出的工作液的流量唯一确定。但是,实际上,在活塞33刚开始前进后,杆侧室31r的工作液被压缩,因此,活塞33的速度比由从杆侧室31r排出的工作液的流量确定的速度快。即,发生跳变。但是,如上所述,通过预先使杆侧室31r的压力上升而压缩杆侧室31r内的工作液,能够降低活塞33开始前进时的杆侧室31r内的工作液的压缩量,进而能够降低跳变。
139.如图6的步骤st2所示,控制装置13(准备控制部13a)例如判定杆压传感器69检测出的压力是否已达到规定的设定压力。而且,在否定判定期间,准备控制部13a持续从泵41向杆侧室31r赋予液压。而且,当做出肯定判定时,控制装置13进入下一步骤。上述设定压力例如可以是能够从泵41向杆侧室31r赋予的最大的压力(从泵41向杆侧室31r以充分的时间
赋予液压时到达的一定压力),也可以是比其低的压力。
140.(低速注射工序:t0~t1)
141.如图6的步骤st3以及图7的“2”行所示,当满足规定的低速注射开始条件时,控制装置13(准备控制部13a)将切换阀57切换到图2的中央的位置,停止从泵41向杆侧室31r供给工作液,结束准备工序。同时,控制装置13(低速注射控制部13b)将先导压导入到acc用阀51,将工作液从蓄压器43供给到头侧室31h。另外,低速注射控制部13b将伺服阀55切换到图2的左侧的位置,将循环回路53接通。由此,活塞33(柱塞23)前进。即,开始低速注射工序。
142.更详细而言,杆侧室31r和头侧室31h通过循环回路53连接,由此理论上成为彼此相同的压力。另外,活塞33的杆侧室31r的受压面积比活塞33的头侧室31h的受压面积小活塞杆35的横截面的面积。因此,活塞33从头侧室31h受到的力比活塞33从杆侧室31r受到的力大,活塞33前进。此时,从杆侧室31r排出的工作液向头侧室31h流入。
143.上述的低速注射开始条件例如包括固定模具103以及移动模具105的合模完成、熔液被供给到注射套筒21、以及在上述的步骤st2中做出肯定判定的情况。需要说明的是,压铸机1的动作也可以设定为先满足对注射套筒21的熔液供给完成和步骤st2的肯定判定的某一个。
144.柱塞23的速度通过伺服阀55的开口度的调整来控制。具体而言,控制装置13基于位置传感器65的检测值对伺服阀55的开口度进行反馈控制。该反馈控制可以是基于柱塞23的速度自身的偏差的通常的速度反馈控制,也可以是通过基于以规定的时间刻度时时刻刻地更新的目标位置与当前时刻的位置的偏差的位置反馈控制来实现的速度反馈控制。
145.(高速注射:t1~t2)
146.如图6的步骤st4以及st5以及图7的“3”行所示,控制装置13(高速注射控制部13c)在柱塞23到达规定的高速注射开始位置时(st4),将柱塞23的速度从低速注射速度v
l
切换为高速注射速度v
h
,进行高速注射工序。
147.具体而言,高速注射控制部13c如图5的时刻t1附近所示,增大伺服阀55中的从杆侧室31r向头侧室31h的流动相关的开口度,增大该流动相关的流量。另外,高速注射控制部13c继低速注射工序之后,基于位置传感器65的检测值对伺服阀55的开口度进行反馈控制。该速度反馈控制与低速注射工序中的速度反馈控制相同,可以基于速度自身的偏差,也可以通过位置反馈控制来实现。
148.高速注射开始位置可以基于对输入装置17的操作而适当地设定。在速度反馈控制基于速度自身的偏差进行的情况下,高速注射控制部13c例如基于位置传感器65检测出的柱塞23的位置,判定柱塞23是否已到达高速注射开始位置,在判定为已到达时变更目标速度。另外,继从低速注射工序向高速注射工序之后,通过对时时刻刻更新的目标位置的位置反馈控制实质上进行速度反馈控制的情况下,例如,作为基于从低速注射工序到高速注射工序的目标位置的时间序列数据进行控制的结果,在柱塞23已到达上述的高速注射开始位置时,切换柱塞23的速度。换言之,不进行柱塞23是否已到达高速注射开始位置的判定。
149.(减速工序:t2~t3)
150.如图6的步骤st6以及st7以及图7的“4”行所示,控制装置13(减速控制部13d)在柱塞23到达规定的减速开始位置时(st6),开始使柱塞23的速度减速的减速工序。
151.具体而言,减速控制部13d如图5的时刻t2附近所示,减小伺服阀55中的从杆侧室
31r向头侧室31h的流动相关的开口度,减小该流动相关的流量。另外,减速控制部13d继高速注射工序之后,基于位置传感器65的检测值对伺服阀55的开口度进行反馈控制。该速度反馈控制与低速注射工序以及调整注射工序中的速度反馈控制相同,可以基于速度自身的偏差,也可以通过位置反馈来实现。
152.在速度反馈控制基于速度自身的偏差进行的情况下,减速控制部13d例如基于位置传感器65检测出的柱塞23的位置,判定柱塞23是否已到达减速开始位置,在判定为已到达时变更目标速度。另外,继从高速注射工序向减速工序之后,通过对时时刻刻更新的目标位置的位置反馈控制实质上进行速度反馈控制的情况下,例如,作为基于从高速注射工序到减速工序的目标位置的时间序列数据进行控制的结果,在柱塞23已到达上述的减速开始位置时,切换柱塞23的速度。换言之,不进行柱塞23是否已到达减速开始位置的判定。
153.减速开始位置例如可以基于对输入装置17的操作而适当地设定。当熔液在一定程度上填充到型腔ca中时,熔液失去去处,柱塞23从该填充的熔液受到反作用力而急剧减速。减速开始位置可以以缓和这样的急剧减速开始时的冲击的方式适当地设定。减速的开始和/或速度梯度可以受到上述那样的伺服阀55的控制和来自熔液的反作用力的某一个的显著影响。
154.(升压工序:t3~t5)
155.如图6的步骤st8以及图7的“5”行所示,当满足规定的升压开始条件时,控制装置13(升压控制部13e)开始使注射压力上升的升压控制。
156.具体而言,如图5的时刻t3以及图7的“5”行所示,控制装置13(升压控制部13e)将伺服阀55的位置切换到图2的左侧的位置,将来自杆侧室31r的工作液的排出目的地从头侧室31h向箱39切换。由此,杆侧室31r的压力从理论上与头侧室31h的压力同等的压力变为比其低的箱压。其结果,容易增大由柱塞23赋予熔液的压力。在升压的过程中,柱塞23大致停止(时刻t4)。
157.上述的升压开始条件可以适当地设定。例如,升压开始条件可以是基于杆压传感器69以及头压传感器67的检测值的注射压力已到达规定的设定压力、头压传感器67的检测值已到达规定的设定压力、或者由位置传感器65检测出的柱塞23的检测位置已到达规定的设定位置。升压开始条件(设定压力或设定位置的设定等)例如可以通过对输入装置17的操作来设定。
158.升压中的伺服阀55的开口度可以适当地设定以及控制。例如,升压控制部13e可以基于根据杆压传感器69以及头压传感器67的检测值求出的注射压力,进行伺服阀55的开口度的反馈控制,以得到通过对输入装置17的操作而设定的期望的升压曲线。更具体而言,例如,可以执行反馈控制以使注射压力的检测值向以规定的时间刻度时时刻刻地更新的目标压力收敛。另外,升压中的伺服阀55的开口度也可以不进行基于注射压力的反馈控制,而仅维持在恒定值(例如最大值)。
159.通常,从杆侧室31r向箱39的工作液的排出被允许至升压工序以及保压工序结束。因此,杆侧室31r的压力成为箱压,另外,铸造压力pe由蓄压器43的压力决定。但是,当在杆侧室31r的压力接近箱39的压力的过程中禁止工作液从杆侧室31r的排出时,通过从蓄压器43的压力赋予活塞33的前进方向的力减去杆侧室31r的压力赋予活塞33的后退方向的力的力来决定铸造压力pe。即,能够实现任意的铸造压力pe。这样的技术例如在日本特开2004
‑
330267以及日本特开2011
‑
224626号公报中公开,其内容可以通过参照编入(incorporation by reference)到本技术中。
160.在图5的时刻t5附近,表示在活塞杆侧室31r的压力接近箱压的过程中,将伺服阀55切换到图2的中央位置,禁止工作液从杆侧室31r的排出,实现任意的铸造压力pe的情况下的动作。该切换可以在满足适当的升压完成条件时进行。例如,升压完成条件可以在基于杆压传感器69以及头压传感器67的检测值的注射压力已到达规定的设定压力时进行。上述设定压力可以是铸造压力pe,也可以是在铸造压力pe上加上或减去考虑了关闭伺服阀55后的注射压力的变动的修正量的压力。另外,例如,也可以将从开始升压工序起经过了规定的时间作为升压完成条件。
161.需要说明的是,虽然没有特别图示,但也可以在升压工序以及保压工序中允许从杆侧室31r向箱39的流动,进行将杆侧室31r的压力作为箱压的控制。但是,在本实施方式的说明中,主要以不将杆侧室31r的压力作为箱压的方式为例。
162.(保压工序:t5~)
163.当如述那样升压工序结束时,如图6的步骤st10所示,控制装置13(保压控制部13f)进行保压工序。如图7的“6”行所示,另外,从上述的升压工序结束时的动作的说明可以理解,保压控制部13f基本上控制各种阀,以维持在升压工序中通过伺服阀55禁止从杆侧室31r的工作液的排出的状态。由此,理论上,维持铸造压力pe。
164.在维持该铸造压力pe的期间,熔液被冷却而凝固。之后,保压控制部13f进行用于结束保压的处理。例如,保压控制部13f可以停止向acc用阀51的先导压的导入,停止从蓄压器43向头侧室31h的液压的供给。另外,保压控制部13f也可以将先导压导入到控制阀61,允许从头侧室31h向箱39的工作液的流动,将头侧室31h作为箱压。也可以通过伺服阀55允许从杆侧室31r向箱39的工作液的流动,将杆侧室31r作为箱压。
165.(保压工序后)
166.虽然未特别图示,但在保压工序之后,控制装置13使合模装置7进行开模,并且利用推出装置11从定模103将成型品推出。此时,控制装置13控制液压装置29以使注射缸27产生用于通过柱塞23推出素坯的驱动力。该推出可以通过与升压工序中的动作同样的动作(在另一观点中为蓄压器43的压力)来实现,也可以通过后述的图7的“8”行的动作(在另一观点中为泵41的压力)来实现。
167.此后,控制装置13使柱塞23后退到初始位置。具体而言,如图7的“7”行所示,伺服阀55被切换到图2的中央的位置,禁止来自杆侧室31r的工作液的排出。acc用阀51不导入先导压,禁止从蓄压器43向头侧室31h的工作液的供给。控制阀61被导入先导压,允许从头侧室31h向切换阀57的流动。切换阀57被切换到图2的左侧的位置,允许从泵41向杆侧室31r的流动,并且允许从头侧室31h向箱39的流动。因此,活塞33由于泵41的压力而后退。
168.另外,控制装置13在适当的时期从泵41向蓄压器43供给工作液,对蓄压器43进行蓄压。具体而言,例如,在先导压未导入到acc用阀51、切换阀57禁止从泵41向注射缸27的工作液的供给的状态下,通过驱动电动机47,从泵41经由流路45a将工作液供给到蓄压器43。
169.(基于泵的柱塞前进)
170.如图7的“8”所示,注射装置9也能够从泵41向头侧室31h供给工作液而使活塞33前进。该动作例如与铸造周期不同,在对输入装置17进行规定的操作而使活塞33前进时进行。
171.具体而言,伺服阀55被切换到图2的左侧的位置,允许从杆侧室31r向箱39的工作液的排出。acc用阀51不导入先导压,禁止从蓄压器43向头侧室31h的工作液的供给。控制阀61可以导入控制压,也可以不导入控制压,总之允许从切换阀57向头侧室31h的流动。切换阀57被切换到图2的右侧的位置,允许从泵41向头侧室31h的流动。
172.需要说明的是,在上述中,杆侧室31r的工作液经由伺服阀55向箱39排出,但也可以经由伺服阀55向头侧室31h排出。另外,也可以构成为利用先导压打开止回阀59,经由止回阀59以及切换阀57从杆侧室31r向箱39排出工作液。
173.(保压工序的详细介绍)
174.图8是示出在升压工序以及保压工序中控制装置13执行的升压
·
保压处理的顺序的一例的流程图。
175.步骤st21~st23与升压工序对应。具体而言,在步骤st21中,控制装置13(升压控制部13e)开始升压工序。在步骤st22中,控制装置13(升压控制部13e)判定是否满足升压完成条件。在图8中,作为升压完成条件,例示了基于杆压传感器69以及头压传感器67的检测值的注射压力是否已到达铸造压力pe的判定。而且,控制装置13在否定判定时持续升压,在肯定判定时进入步骤st23。在步骤st23中,将伺服阀55切换到图2的中央的位置,禁止来自杆侧室31r的工作液的排出,完成升压工序。在另一观点中,开始保压工序。
176.在此,在保压工序中,基本上持续从蓄压器43向头侧室31h的液压的赋予,并且禁止从杆侧室31r的工作液的排出。因此,理论上维持铸造压力pe,该铸造压力pe通过蓄压器43的压力和通过伺服阀55禁止从杆侧室31r的工作液的排出时的杆侧室31r的压力而实现。
177.但是,实际上,由于工作液的泄漏,在保压中从柱塞23赋予熔液的压力有可能变动。例如,如果在杆侧室31r侧产生泄漏而杆侧室31r的压力降低,则注射压力上升而比铸造压力pe大。相反,如果在头侧室31h侧产生泄漏而蓄压器43的压力降低,则注射压力降低而比铸造压力pe小。因此,如步骤st24~st27所示,可以进行从泵41向杆侧室31r或头侧室31h补给工作液的处理。
178.在步骤st24中,控制装置13(保压控制部13f)判定基于杆压传感器69以及头压传感器67的检测值的注射压力的检测值是否已超过规定的容许上限。而且,保压控制部13f在肯定判定时进入步骤st25,在否定判定时进入步骤st26。容许上限是比铸造压力pe大的压力,可以通过对输入装置17的操作来设定,也可以通过保压控制部13f基于铸造压力pe来设定。
179.在步骤st25中,保压控制部13f控制液压供给部77,以将泵41的液压暂时地对杆侧室31r赋予,使杆侧室31r的压力上升。由此,注射压力降低。更具体而言,如图7的“6”行的括号内所示,保压控制部13f将切换阀57切换到图2的左侧的位置,允许从泵41向杆侧室31r的流动。需要说明的是,与头侧室31h连接的流路45h和箱39通过切换阀57连接,但从头侧室31h向箱39的工作液的排出被未导入先导压的控制阀61禁止。
180.使杆侧室31r的压力上升的动作例如可以仅进行规定的时间,也可以在注射压力的检测值满足规定的条件之前进行。规定的条件可以是注射压力的检测值低于容许上限,也可以是注射压力的检测值降低到铸造压力pe(或者对其加上了规定的修正量的压力)。保压控制部13f在使杆侧室31r的压力上升后,使切换阀57返回到图2的中央的位置(禁止从泵41向注射缸27的流动的位置),进入步骤st28。
181.在步骤st26中,保压控制部13f判定基于杆压传感器69以及头压传感器67的检测值的注射压力的检测值是否低于规定的容许下限。而且,保压控制部13f在肯定判定时进入步骤st27,在否定判定时进入步骤st28。容许下限是比铸造压力pe小的压力,可以通过对输入装置17的操作来设定,也可以通过保压控制部13f基于铸造压力pe来设定。
182.在步骤st27中,保压控制部13f控制液压供给部77,以将泵41的液压暂时地对头侧室31h赋予,使头侧室31h的压力上升。由此,注射压力上升。更具体而言,如图7的“6”行的括号内所示,保压控制部13f将切换阀57切换到图2的右侧的位置,允许从泵41向头侧室31h(蓄压器43)的流动。需要说明的是,与杆侧室31r连接的流路45g和箱39通过切换阀57连接,但从杆侧室31r向箱39的工作液的排出被止回阀59禁止。
183.使头侧室31h的压力上升的动作例如可以仅进行规定的时间,也可以在注射压力的检测值满足规定的条件之前进行。规定的条件可以是注射压力的检测值超过容许下限,也可以是注射压力的检测值上升到铸造压力pe(或者对其加上了规定的修正量的压力)。保压控制部13f在使头侧室31h的压力上升后,使切换阀57返回到图2的中央的位置(禁止从泵41向注射缸27的流动的位置),进入步骤st28。
184.在步骤st28中,保压控制部13f判定是否已满足保压结束条件,在否定判定时返回步骤st24,在肯定判定时结束保压。保压结束条件例如可以设为从规定的时刻(例如保压工序的开始时刻)开始经过了规定的时间(例如足以使熔液凝固的时间)。
185.如上所述,在本实施方式中,注射装置9具有注射缸27、循环回路53、箱39和伺服阀55。注射缸27驱动将成型材料向模具101内推出的柱塞23。循环回路53使伴随着注射缸27的活塞33的前进而从杆侧室31r排出的工作液向头侧室31h流入。箱39接收伴随着活塞33的前进而从杆侧室31r排出的工作液。伺服阀55设置在循环回路53中,并且与箱39连接。伺服阀55能够在第一状态(图2的右侧的位置)和第二状态(图2的左侧的位置)之间切换。在第一状态下,伺服阀55允许从杆侧室31r向头侧室31h的流动,并且禁止从杆侧室31r向箱39的流动。在第二状态下,伺服阀55禁止从杆侧室31r向头侧室31h的流动,并且允许从杆侧室31r向箱39的流动。且伺服阀55能够分别在第一状态以及第二状态下控制从杆侧室31r排出的工作液的流量。
186.因此,通过一个伺服阀55来实现循环回路53的接通以及断开、杆侧室31r与箱39的连通以及阻断、以及从杆侧室31r排出的工作液的流量的控制。其结果,例如,可以期待结构的简化、控制的简化、工序间的切换(例如从减速工序向升压工序的切换)的顺畅化、和/或成本削减。
187.在本实施方式中,伺服阀55能够在上述第一状态、上述第二状态、和禁止从杆侧室31r向头侧室31h以及箱39的任一方的流动的第三状态(图2的中央的位置)之间切换。
188.在该情况下,例如,通过伺服阀55能够实现的动作增加,上述的简化的效果提高。例如,伺服阀55能够用于在升压工序中在杆侧室31r的压力降低的过程中禁止从杆侧室31r的工作液的排出,实现任意的铸造压力pe。
189.在本实施方式中,伺服阀55具有中空状的阀主体(阀套筒71)和能够在阀套筒71内移动的阀体(阀芯73)。阀套筒71具有与杆侧室31r连通的杆侧口75r、与头侧室31h连通的头侧口75h、与箱39连通的箱侧口75t。阀芯73能够在将杆侧口75r和头侧口75h连通并且将杆侧口75r和箱侧口75t阻断的位置、将杆侧口75r和头侧口75h阻断并且将杆侧口75r和箱侧
口75t连通的位置之间移动。
190.在该情况下,例如,仅通过阀芯73相对于阀套筒71的移动,就能够进行来自杆侧室31r的工作液的排出目的地的切换和流量控制这两者,简化的效果提高。
191.在本实施方式中,伺服阀55是具有作为阀主体的阀套筒71和作为阀体的阀芯73的滑阀。杆侧口75r、头侧口75h以及箱侧口75t在阀套筒71的绕轴的内周面开口。阀芯73在阀套筒71内沿轴向滑动。头侧口75h相对于杆侧口75r位于阀芯73的移动方向的一侧(图3的左侧)。箱侧口75t相对于杆侧口75r位于阀芯73的移动方向的另一侧(图3的右侧)。阀芯73具有大径部73b、小径部73d以及73e。大径部73b具有相对于阀套筒71滑动的径,能够封堵杆侧口75r的整体。小径部73d相对于大径部73b位于所述一侧(图3的左侧),径比大径部73b小,通过与杆侧口75r以及头侧口75h对置,能够将两者连通。小径部73e相对于大径部73b位于所述另一侧(图3的右侧),径比大径部73b小,通过与杆侧口75r以及箱侧口75t对置,能够将两者连通。
192.在该情况下,例如,从杆侧口75r流入到阀套筒71的工作液的两个目的地(头侧口75h以及箱侧口75t)均与杆侧口75r邻接。其结果,例如能够简化结构,或者使工作液的目的地的切换迅速化。另外,例如与本实施方式不同,与在能够封堵头侧口75h以及箱侧口75t的两个大径部之间,设置有将杆侧口75r和其他口连通的一个小径部的方式(该方式也包含在本公开的技术中)相比,限制工作液的流动的大径部直接作用于杆侧口75r。其结果,例如,期待提高从杆侧室31r排出的工作液的流量控制的精度。
193.另外,在本实施方式中,注射装置9具有止回阀56。止回阀56在循环回路53内位于头侧室31h与伺服阀55之间,禁止从头侧室31h向伺服阀55的流动,允许从伺服阀55向头侧室31h的流动。
194.在该情况下,例如,当在使循环回路53接通的状态下从蓄压器43将工作液供给到头侧室31h时,降低产生从头侧室31h向杆侧室31r的流动的可能性。
195.另外,在本实施方式中,注射装置9具有注射控制部13h和升压控制部13e。注射控制部13h控制伺服阀55,以使至少在低速注射工序以及高速注射工序的期间中,成为所述第一状态(循环回路53被接通的状态)。另外,升压控制部13e控制伺服阀55,以使至少在升压工序的期间中,成为所述第二状态(允许从杆侧室31r向箱39的流动的状态)。
196.在该情况下,在活塞33的移动距离相对较长的低速注射工序以及高速注射工序中,通过循环回路53能够减少工作液的需要量。另一方面,在升压工序中,能够增大杆侧室31r与头侧室31h的压力差,迅速地进行升压。
197.另外,在本实施方式中,注射装置9具有液压供给部77和保压控制部13f。液压供给部77包括液压源(泵41)。保压控制部13f控制液压供给部77以使在保压工序的期间中暂时地(在步骤s24中做出肯定判定时)从泵41向杆侧室31r赋予液压。
198.在该情况下,例如,在保压工序中,工作液从杆侧室31r泄漏,杆侧室31r的压力降低,进而注射压力比铸造压力pe大时,能够使杆侧室31r的压力上升,使注射压力接近铸造压力pe。其结果,能够提高压铸品的品质。
199.另外,在本实施方式中,注射装置9具有蓄压器43和控制从蓄压器43向头侧室31h的工作液的流动的acc用阀51。保压控制部13f控制acc用阀51以使在保压工序的期间中从蓄压器43向头侧室31h持续地赋予液压,且控制液压供给部77以使在保压工序的期间中暂
时地(在步骤st26中做出肯定判定时)从液压供给部77的泵41向头侧室31h赋予液压。
200.在该情况下,例如,在保压工序中,工作液从头侧室31h(蓄压器43)泄漏,头侧室31h的压力降低,进而注射压力比铸造压力pe小时,能够使头侧室31h的压力上升,使注射压力接近铸造压力pe。其结果,能够提高压铸品的品质。
201.另外,在本实施方式中,注射装置9具有准备控制部13a。准备控制部13a控制液压供给部77,以在注射开始前从液压源(泵41)向杆侧室31r赋予液压,使注射开始时的杆侧室31r的压力比箱39的压力高。
202.因此,如上所述,减小了产生跳变的可能性。另外,通过在保压工序中对杆侧室31r赋予液压的液压供给部77进行降低产生跳变的可能性的动作,因此结构简化。
203.(变形例)
204.在实施方式中,保压工序通过从蓄压器43向头侧室31h持续地赋予压力来实现。但是,保压工序也可以通过从泵41向头侧室31h持续地赋予压力来实现。
205.在图5的“液压供给部”的项目中,用虚线表示这样的变形例中的液压供给部的动作。图中,“p
→
h”表示从泵41向头侧室31h赋予液压。“c”表示没有赋予上述液压。
206.在图5的例子中,直到保压工序中的任意的时刻t6为止,进行与实施方式相同的动作。时刻t6可以是保压开始时刻(升压完成时刻、时刻t5),也可以是该时刻之后的时刻(图示的例子)。另外,时刻t6例如可以通过对输入装置17的操作来设定。
207.而且,在时刻t6以后,直到保压工序完成为止,从泵41向头侧室31h持续地供给工作液。由此,头侧室31h的压力成为泵压。蓄压器43在被泵41蓄压后,在从低速注射到升压工序为止的期间中将工作液向注射缸27排出,因此比泵压低。因此,通过从泵41向头侧室31h赋予液压来进行保压,与从蓄压器43向头侧室31h赋予液压的情况相比,能够得到高的铸造压力。
208.在保压工序中从泵41向头侧室31h赋予液压时的液压装置29的状态例如可以设为与在步骤st27中使头侧室31h的压力上升时的状态相同或类似的状态。具体而言,伺服阀55可以设为图2的中央的位置(禁止从杆侧室31r的工作液的排出的位置)。但是,本变形例也可以适用于杆侧室31r的压力为箱压的方式。acc用阀51例如与步骤st27不同,可以设为不导入先导压的状态。但是,也可以与步骤st27同样地导入。控制阀61被导入先导压,允许从切换阀57向头侧室31h的流动。切换阀57被切换到图2的右侧的位置,允许从泵41向头侧室31h的流动。
209.需要说明的是,实施方式的动作和变形例的动作可以通过对输入装置17的操作来选择。
210.在以上的实施方式中,压铸机1是成型机的一个例子。熔液是成型材料的一个例子。阀套筒71是阀主体的一个例子。阀芯73是阀体的一个例子。小径部73d是头侧小径部的一个例子。小径部73e是箱侧小径部的一个例子。泵41是液压源的一个例子。
211.本公开的技术不限定于上述的实施方式以及变形例,可以以各种方式来实施。
212.成型机并不限定于压铸机。例如,成型机可以是其他金属成型机,也可以是对树脂进行成型的注射成型机,也可以是对在木粉中混合了热塑性树脂等的材料进行成型的成型机。另外,成型机不限定于横式合模横向注射,例如也可以是纵式合模纵向注射、横式合模纵向注射、纵式合模横向注射。
213.伺服阀并不限定于滑阀。例如,伺服阀可以是阀体相对于阀主体旋转的旋转阀,也可以是在口的开口方向上阀体与口的距离变化的阀。另外,伺服阀也可以不能够切换为禁止从杆侧室向头侧室以及箱的任一方的流动的第三状态。在第一状态与第二状态的切换的期间,也可以产生不允许从杆侧室向头侧室以及箱的任一方的流动的状态。
214.实施方式所示的液压装置的结构只不过是一个例子。流路以及阀的结构除了图示的以外也可以是各种结构。另外,注射缸也可以设为增压式的缸。蓄压器可以包括注射用和升压用这两种蓄压器。液压供给部并不限定于泵和阀的组合,例如也可以包括液压缸和驱动液压缸的杆而从液压缸送出工作液的电动机。使保压工序中的杆压以及头压上升的动作也可以仅在必要时间驱动泵,并且通过止回阀防止从注射缸向泵的逆流。
215.附图标记说明
216.1 压铸机
217.9 注射装置
218.21 套筒
219.23 柱塞
220.27 注射缸
221.31r 杆侧室
222.31h 头侧室
223.33 活塞
224.39 箱
225.53 循环回路
226.55 伺服阀
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1