一种黄金饰品煲酸生产线的制作方法
1.本实用新型涉及一种生产线,尤其涉及一种黄金饰品煲酸生产线。
背景技术:
2.黄金饰品,即用黄金制作而成的饰品。黄金是一种贵重金属,是人类最早发现和开发利用的金属之一。它是制作首饰和钱币的重要原料,它不仅被视为美好和富有的象征,而且还以其特有的价值,造福于人类的生活。
3.黄金饰品的加工分为精加工和粗加工两种,而在对黄金饰品进行精加工的过程中需要对黄金饰品进行盐酸浸泡,然后再使用纯净水进行清洗,而对于一些小作坊往往需要工人进行手工操作,从而降低了黄金饰品的精加工效率,而盐酸浸泡这道工序又存在一定的危险性,突出了传统黄金饰品精加工的不足之处。
技术实现要素:
4.本实用新型的目的在于提供一种黄金饰品煲酸生产线,以解决上述技术问题。
5.为实现上述目的本实用新型采用以下技术方案:
6.一种黄金饰品煲酸生产线,包括输入装置、一号六轴机器人、真空注液机、二号六轴机器人、电炉、三号六轴机器人、超声波清洗机、四号六轴机器人、真空氮气烤箱、五号六轴机器人、输出装置、总控系统,其特征在于:所述输入装置用来运输待加工的产品,所述一号六轴机器人对待加工的产品搬运到真空注液机内部,所述真空注液机对待加工的产品注入液体,所述二号六轴机器人将真空注液机内的待加工的产品搬运至电炉内部,所述电炉对待加工的产品进行煲煮,所述三号六轴机器人将电炉内的待加工的产品搬运到超声波清洗机内,所述超声波清洗机对待加工的产品进行清洗,所述四号六轴机器人将超声波清洗机内的待加工的产品搬运至真空氮气烤箱内,所述真空氮气烤箱将待加工的产品进行除湿,所述五号六轴机器人将真空氮气烤箱内的待加工的产品搬运至输出装置上,所述总控系统控制输入装置、一号六轴机器人、真空注液机、二号六轴机器人、电炉、三号六轴机器人、超声波清洗机、四号六轴机器人、真空氮气烤箱、五号六轴机器人和输出装置。
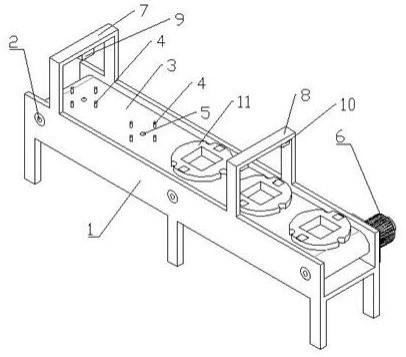
7.在上述技术方案基础上,所述输入装置和输出装置包括安装架、托辊、输送皮带、限位柱、识别点、减速电机、左支撑架、右支撑架、识别摄像头、扫描摄像头、放置盘、识别区、夹紧槽,所述输出装置和输出装置分别设有一个水平的安装架,两所述安装架上部通过轴承转动连接有多个水平的托辊,两所述安装架上部的各托辊外部分别套接有一水平的输送皮带,两所述输送皮带上固定铆接有多个竖直的限位柱,各所述限位柱每四个为一组等距固定在输送皮带上,且每组限位柱呈对称四点固定,两所述输送皮带外壁喷涂有多个水平的识别点,各所述识别点分别位于每组限位柱的中心位置,两所述安装架后端右部分别固定有一水平的减速电机,两所述减速电机的转轴分别与两托辊的轴同轴心固定,两所述安装架顶端左部分别固定有一竖直的左支撑架,两所述安装架顶端右部固定有一竖直的右支撑架,两所述左支撑架上部底端固定有一竖直的识别摄像头,两所述右支撑架上部底端对
称固定有两竖直的扫描摄像头,所述输送皮带上端右部置有多个水平的放置盘,各所述放置盘被每组限位柱所限定位置,各所述放置盘顶端前后两部分别固定有一水平的识别区,各所述放置盘外壁圆周等角度贯穿有多个夹紧槽。
8.在上述技术方案基础上,所述识别摄像头是用来对识别点进行识别的,所述识别区用来张贴所需的二维码贴纸,所述扫描摄像头是用来对识别区上的二维码贴纸进行扫描的,所述夹紧槽方便机器人的夹取搬运。
9.与现有技术相比,本实用新型具有以下优点:本实用新型采用多个装置进行辅助工作,同时利用多个六轴机器人进行搬运,能够自动对黄金饰品进行盐酸浸泡、清洗和除湿等加工,完全摆脱了工人的手工操作,在解放了大量劳动力的同时,不仅提高了黄金饰品的生产效率,而且大大降低了生产过程中的危险性。
附图说明
10.图1为本实用新型的流程示意图。
11.图2为本实用新型放置盘的安装示意图。
12.图3为本实用新型放置盘的结构示意图。
13.图4为本实用新型放置盘的底部结构示意图。
14.图中:1、安装架,2、托辊,3、输送皮带,4、限位柱,5、识别点,6、减速电机,7、左支撑架,8、右支撑架,9、识别摄像头, 10、扫描摄像头,11、放置盘,12、识别区,13、夹紧槽。
具体实施方式
15.下面结合附图和具体实施例对本实用新型作进一步详细阐述。
16.如图1
‑
4所示,一种黄金饰品煲酸生产线,包括输入装置、一号六轴机器人、真空注液机、二号六轴机器人、电炉、三号六轴机器人、超声波清洗机、四号六轴机器人、真空氮气烤箱、五号六轴机器人、输出装置、总控系统,其特征在于:所述输入装置用来运输待加工的产品,所述一号六轴机器人对待加工的产品搬运到真空注液机内部,所述真空注液机对待加工的产品注入液体,所述二号六轴机器人将真空注液机内的待加工的产品搬运至电炉内部,所述电炉对待加工的产品进行煲煮,所述三号六轴机器人将电炉内的待加工的产品搬运到超声波清洗机内,所述超声波清洗机对待加工的产品进行清洗,所述四号六轴机器人将超声波清洗机内的待加工的产品搬运至真空氮气烤箱内,所述真空氮气烤箱将待加工的产品进行除湿,所述五号六轴机器人将真空氮气烤箱内的待加工的产品搬运至输出装置上,所述总控系统控制输入装置、一号六轴机器人、真空注液机、二号六轴机器人、电炉、三号六轴机器人、超声波清洗机、四号六轴机器人、真空氮气烤箱、五号六轴机器人和输出装置。
17.所述输入装置和输出装置包括安装架1、托辊2、输送皮带3、限位柱4、识别点5、减速电机6、左支撑架7、右支撑架8、识别摄像头9、扫描摄像头10、放置盘11、识别区12、夹紧槽13,所述输出装置和输出装置分别设有一个水平的安装架1,两所述安装架1上部通过轴承转动连接有多个水平的托辊2,两所述安装架1上部的各托辊2外部分别套接有一水平的输送皮带3,两所述输送皮带3上固定铆接有多个竖直的限位柱4,各所述限位柱4每四个为一组等距固定在输送皮带3上,且每组限位柱4呈对称四点固定,两所述输送皮带3外壁喷涂有
多个水平的识别点5,各所述识别点5分别位于每组限位柱4的中心位置,两所述安装架1后端右部分别固定有一水平的减速电机6,两所述减速电机6的转轴分别与两托辊2的轴同轴心固定,两所述安装架1顶端左部分别固定有一竖直的左支撑架7,两所述安装架1顶端右部固定有一竖直的右支撑架8,两所述左支撑架7 上部底端固定有一竖直的识别摄像头9,两所述右支撑架8上部底端对称固定有两竖直的扫描摄像头10,所述输送皮带3上端右部置有多个水平的放置盘11,各所述放置盘11被每组限位柱4所限定位置,各所述放置盘11顶端前后两部分别固定有一水平的识别区12,各所述放置盘11外壁圆周等角度贯穿有多个夹紧槽13。
18.所述识别摄像头9是用来对识别点5进行识别的,所述识别区 12用来张贴所需的二维码贴纸,所述扫描摄像头10是用来对识别区 12上的二维码贴纸进行扫描的,所述夹紧槽13方便机器人的夹取搬运。
19.本实用新型的工作原理:人工将产品放入放置盘11上,并将该放置盘11放置在属于输入装置的输送皮带3的最右部,然后输送皮带3将放置盘11进行托运,则输入装置内的识别摄像头9能够对识别点5进行识别,从而控制输送皮带3的步进传动,而扫描摄像头 10能够对二维码贴纸进行识别,当放置盘11输送到输送皮带3的中部位置时,总控系统按照二维码贴纸内容自动调取煲煮程序,一号六轴机器人自动把产品放入真空注液机内,然后启动设备,设备自动关门并启动真空,从而对放置盘11内部注满液体,加工时间到达后二号六轴机器人自动把产品从真空注液机中取出,并放入对应的电炉内启动煲煮并启动计时,煲煮时间到后三号六轴机器人取出产品放入超声波清洗机内进行清洗,时间到后四号六轴机器人从超声波清洗机内取出产品放入真空氮气烤箱,并自动计时进行除潮,时间到后五号六轴机器人自动取出产品放入输出装置的输送皮带3右部,输送皮带3 通过识别摄像头9进行步进运送产品到人工取产品位置,同时对放置盘11上的二维码进行扫描,并对其信息进行确认,然后人工取走,加工完成。
20.以上所述为本实用新型较佳实施例,对于本领域的普通技术人员而言,根据本实用新型的教导,在不脱离本实用新型的原理与精神的情况下,对实施方式所进行的改变、修改、替换和变型仍落入本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1