一种全自动研磨机的制作方法
1.本发明属于机加工设备技术领域,涉及一种全自动研磨机。
背景技术:
2.目前,国内可转位刀片加工行业大多仍采用手工、半自动磨削加工可转位刀片,对操作人员的技术水平要求比较高,但加工出来的产品品质仍然比较低,品质一致性差,效率低,半自动加工虽然品质一致性及效率有些提高,对操作人员技术水平要求有所降低但磨削一个可转位刀片要重复装夹几次,这种磨削方式仍难以满足高品质加工的要求。
技术实现要素:
3.本发明的目的是针对现有的技术存在上述问题,提出了一种全自动研磨机,本发明所要解决的技术问题是:如何提高刀具研磨效率。
4.本发明的目的可通过下列技术方案来实现:
5.一种全自动研磨机,其特征在于,所述研磨机包括:
6.工作台;
7.料仓,所述料仓用于存放待加工的刀片;
8.刀片夹持机构,所述刀片夹持机构用于固定待加工的刀片,且偏心设置于转台上,所述转台转动设置于工作台上,所述工作台上设置有能够带动转台转动的旋转驱动源一;
9.砂轮头机构,所述砂轮头机构设置于工作台上,且可沿工作台的x向和y向移动,用于磨削刀片夹持机构处的刀片;
10.机器人,所述机器人设置于工作台上,用于将所述料仓处的待加工的刀片输送至所述刀片夹持机构处,并且将刀片夹持机构处的加工完毕的刀片输送至工作台的下料区。
11.其工作原理如下:加工时,机器人将料仓处的待加工的刀片输送至刀片夹持机构处,刀片夹持机构将待加工的刀片夹紧,砂轮头机构移动至刀片夹持机构处对刀片进行加工,在该过程中,可通过转台调整刀片夹持机构的位置和角度,从而对刀片进行带角度的研磨;待加工完毕后,机器人再将刀片夹持机构处加工完毕的刀片输送至工作台的下料区。通过上述步骤,实现刀片的全自动周边磨,可有效提高刀具研磨效率。
12.在上述的一种全自动研磨机中,所述料仓上放置有若干个料盘,所述料盘上开设有用于放置待加工刀片的储纳槽。设计有多个料盘后,可提高上料效率。
13.在上述的一种全自动研磨机中,所述刀片夹持机构包括设置于所述转台上的夹持底座,所述夹持底座上间隔设置有固定座一和固定座二,所述固定座一上转动设置有顶针一,所述固定座一上设置有能够带动顶针一旋转的旋转驱动源二;所述固定座二上滑动设置有顶针二,所述固定座二上设置有能够带动顶针二移动的直线驱动源;所述顶针一与顶针二间隔设置,且能够抵紧刀片的两端。加工时,可将刀片放置于顶针一与顶针二之间,直线驱动源一带动顶针二移动,与顶针一配合将刀片夹紧,旋转驱动源二旋转,可带动刀片旋转,从而配合砂轮头机构对刀片进行研磨。
14.在上述的一种全自动研磨机中,所述旋转驱动源一的输出轴上设置有高承压轴承。设计有高承压轴承,可以保证转台下方的同轴度,可起到自动找到虚拟中心点的作用。
15.在上述的一种全自动研磨机中,所述固定座一和固定座二(35)之间设置有用于保证顶针一和顶针二同轴的感应开关。设计有感应开关,可保证固定座一和固定座二之间的绝对精度,从而保证加工刀具的绝对位置。
16.在上述的一种全自动研磨机中,所述刀片夹持机构还包括滑孔、推柱及杠杆,所述滑孔开设于所述固定座二上,所述推柱滑动设置于所述滑孔内,所述顶针二固定于所述推柱的一端;所述杠杆的中部枢接于固定座二上,所述杠杆的一端铰接于所述推柱的另一端,所述直线驱动源一的输出轴与所述杠杆的另一端铰接。直线驱动源一的输出轴伸缩,可带动杠杆摆动,从而带动推柱在滑孔内滑动,进而带动顶针二移动,夹紧刀片或将刀片松脱。
17.在上述的一种全自动研磨机中,所述砂轮头机构包括x向导轨、y向导轨、砂轮座、旋转驱动源三和砂轮盘,所述x向导轨设置于工作台上,所述y向导轨设置于x向导轨上,所述砂轮座设置于所述y向导轨上,所述旋转驱动源三固定于所述砂轮座上,所述旋转驱动源三的输出轴与所述砂轮盘相连接。设计有x向导轨和y向导轨后,砂轮盘可沿x向和y向移动;而旋转驱动源三可通过旋转带动砂轮盘旋转,对刀片进行研磨。
18.在上述的一种全自动研磨机中,所述砂轮座二上固定有直线驱动源二,所述直线驱动源二的输出端设置有圆面修整砂轮,所述圆面修整砂轮位于所述砂轮盘的上方。砂轮盘的外圆面需要修整时,直线驱动源二可带动圆面修整砂轮移动至与砂轮盘的外圆面接触,从而对砂轮盘进行磨削。
19.在上述的一种全自动研磨机中,所述工作台上设置有立柱,所述立柱上设置有直线驱动源三,所述直线驱动源三的输出端设置有端面修整砂轮,所述端面修整砂轮位于所述砂轮盘的一侧,且能够与所述砂轮盘的端面相接触。砂轮盘的端面需要修整时,直线驱动源三可带动端面修整砂轮的轮缘与砂轮盘的端面相接触,对砂轮盘的端面进行修整。
20.与现有技术相比,本发明具有以下优点:
21.本发明可实现刀片的全自动周边磨,有效提高刀具研磨效率。
附图说明
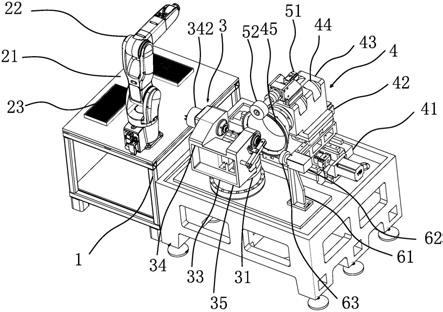
22.图1是本研磨机的轴测图。
23.图2是本研磨机的俯视图。
24.图3是本刀片夹持机构的结构示意图。
25.图4是本砂轮头机构的结构示意图。
26.图5是本刀片夹持机构的剖视图。
27.图中,1、工作台;21、料仓;22、机器人;23、料盘;3、刀片夹持机构;31、转台;32、旋转驱动源一;33、夹持底座;34、固定座一;341、顶针一;342、旋转驱动源二;35、固定座二;351、顶针二;352、直线驱动源一;353、滑孔;354、推柱;355、杠杆;36、轴承;4、砂轮头机构;41、x向导轨;42、y向导轨;43、砂轮座;44、旋转驱动源三;45、砂轮盘;51、直线驱动源二;52、圆面修整砂轮;61、立柱;62、直线驱动源三;63、端面修整砂轮。
具体实施方式
28.以下是本发明的具体实施例并结合附图,对本发明的技术方案作进一步的描述,但本发明并不限于这些实施例。
29.如图1所示,本研磨机包括:
30.工作台1;
31.料仓21,料仓21用于存放待加工的刀片;
32.刀片夹持机构3,刀片夹持机构3用于固定待加工的刀片,且偏心设置于转台31上,转台31转动设置于工作台1上,工作台1上设置有能够带动转台31转动的旋转驱动源一32;
33.砂轮头机构4,砂轮头机构4设置于工作台1上,且可沿工作台1的x向和y向移动,用于磨削刀片夹持机构3处的刀片;
34.机器人22,机器人22设置于工作台1上,用于将料仓21处的待加工的刀片输送至刀片夹持机构3处,并且将刀片夹持机构3处的加工完毕的刀片输送至工作台1的下料区。
35.本实施例中,各旋转驱动源可采用电机等,各直线驱动源可采用直线电机、气缸、电磁铁等。
36.具体来讲,如图1、图2所示,料仓21上放置有若干个料盘23,料盘23上开设有用于放置待加工刀片的储纳槽。料盘23可以沿工作台1的高度方向叠放,当然也可沿其它方向放置,一次可在料仓21中放置多个料盘23,方便上料及更换,提高上料效率。当然,料盘23的形状,可根据刀片的样式进行更换,并不局限于说明书附图中的形状。
37.如图1、图3、图5所示,本实施例中,刀片夹持机构3包括设置于转台31上的夹持底座33,夹持底座33上间隔设置有固定座一34和固定座二35,固定座一34上转动设置有顶针一341,固定座一34上设置有能够带动顶针一341旋转的旋转驱动源二342;固定座二35上滑动设置有顶针二351,固定座二35上设置有能够带动顶针二351移动的直线驱动源;顶针一341与顶针二351间隔设置,且能够抵紧刀片的两端。
38.作为优选,刀片夹持机构3还包括滑孔353、推柱354及杠杆355,滑孔353开设于固定座二35上,推柱354滑动设置于滑孔353内,顶针二351固定于推柱354的一端;杠杆355的中部枢接于固定座二35上,杠杆355的一端铰接于推柱354的另一端,直线驱动源一352的输出轴与杠杆355的另一端铰接。
39.作为优选,旋转驱动源一32的输出轴上设置有高承压轴承36。固定座一34和固定座二35之间设置有用于保证顶针一341和顶针二351同轴的感应开关,该感应开关优选为基恩士感应开关。
40.如图1、图4所示,本实施例中,砂轮头机构4包括x向导轨41、y向导轨42、砂轮座43、旋转驱动源三44和砂轮盘45,x向导轨41设置于工作台1上,y向导轨42设置于x向导轨41上,砂轮座43设置于y向导轨42上,旋转驱动源三44固定于砂轮座43上,旋转驱动源三44的输出轴与砂轮盘45相连接。
41.由于砂轮盘在实际磨削中,会出现磨损,因此,为了对砂轮盘进行修整,如图1、图4所示,本实施例中,砂轮座43二上固定有直线驱动源二51,直线驱动源二51的输出端设置有圆面修整砂轮52,圆面修整砂轮52位于砂轮盘45的上方。工作台1上设置有立柱61,立柱61上设置有直线驱动源三62,直线驱动源三62的输出端设置有端面修整砂轮63,端面修整砂轮63位于砂轮盘45的一侧,且能够与砂轮盘45的端面相接触。
42.本发明的工作原理如下:加工时,机器人将料仓处的待加工的刀片输送至刀片夹持机构处,刀片夹持机构将待加工的刀片夹紧,砂轮头机构移动至刀片夹持机构处对刀片进行加工,在该过程中,可通过转台调整刀片夹持机构的位置和角度,从而对刀片进行带角度的研磨;待加工完毕后,机器人再将刀片夹持机构处加工完毕的刀片输送至工作台的下料区。
43.本文中所描述的具体实施例仅仅是对本发明精神作举例说明。本发明所属技术领域的技术人员可以对所描述的具体实施例做各种各样的修改或补充或采用类似的方式替代,但并不会偏离本发明的精神或者超越所附权利要求书所定义的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1