利用浮动边缘控制的抛光承载头的制作方法
1.本公开总体上涉及化学机械抛光,并且更具体地涉及对基板边缘附近的抛 光速率的控制。
背景技术:
2.集成电路典型地在硅晶片上通过顺序地沉积导电层、半导电层或绝缘层并 通过对这些层的后续处理而被形成在基板(例如,半导体晶片)上。
3.一个制造步骤涉及在非平面表面上沉积填料层并使该填料层平面化。对于 某些应用,填料层被平面化,直到经图案化的层的定表面被保留或期望的厚度 保留在下方的层上方。此外,平面化可用于使例如电介质层的基板表面平面化 以用于光刻。
4.化学机械抛光(cmp)是一种所接受的平面化方法。该平面化方法典型地 要求基板被安装在承载头上。基板的被暴露的表面抵靠旋转的抛光垫而放置。 承载头提供基板上的可控负载,从而将其推到抵靠抛光垫。在一些抛光机器中, 承载头包括形成多个独立地可加压的径向同心的腔室的隔膜,其中,每个腔室 中的压力控制基板上的每个对应区域中的抛光速率。抛光液,诸如具有研磨颗 粒的浆料,被供应到抛光垫的表面。
技术实现要素:
5.在一个方面,一种用于在抛光系统中固持基板的承载头包括:壳体;环形 主体,通过致动器相对于壳体是竖直地可移动的;第一环形隔膜,经固定以在 环形主体下方移动,从而在第一环形隔膜与环形主体之间形成至少一个下可加 压腔室;以及至少一个压力供应线,连接至至少一个下可加压腔室。环形主体 包括上部以及从该上部向下伸出的至少一个下杆,其中,该至少一个下杆位于 至少一个下可加压腔室内部。
6.某些实施方式可以包括但不限于以下可能的优势中的一个或多个。
7.所描述的技术可针对经历抛光的基板改善总体均匀性。系统可通过在基板 的不同区域上方施加不同的分布式压力并在基板的边缘区域上的不同位置处 施加一个或多个集中力来调整基板的边缘处的载荷分布。系统可调整在由第一 环形隔膜形成的一个或多个可加压腔室中的一个或多个压力,以改变加载面积 以及基板上的分布式压力的量。
8.系统还可包括具有一个或多个向下凸出的下杆的环形主体。系统可通过使 用不同的压力供应使第二环形隔膜变形,以使一个或多个下杆基本上向下位 移,从而接触基板的一个或多个对应的聚集区域并将一个或多个相应的聚集力 施加到基板的一个或多个对应的聚集区域上。聚集区域的、相应的聚集力被施 加所在的位置还可通过改变附连至环形主体的下杆的形状、位置和数量来调 整。
9.因此,系统易于适配各种边缘抛光轮廓,并且可调整施加在基板的环形边 缘区域上的力的组合,从而定制区域中的抛光速率。在一些实现方式中,系统 可增加在区域的至少一部分上的有效压力并减小在区域的其他部分上的有效 压力,从而调整基板的特定区域的抛光速率。因此,基板上的层的环形边缘区 域的抛光过程能以更高的分辨率动态地受
控。
10.更具体地,有效压力的大小和边缘区域的有效面积基于来自每个腔室的加 载组合(即,分布式力和集中力)来确定。提供更多的灵活性,以将特定压力 分布施加到晶片的外部。
11.以下附图和描述阐述了本发明的一个或多个实施例的细节。根据说明书和 附图以及根据权利要求书,其他特征、目的以及优点显而易见。
附图说明
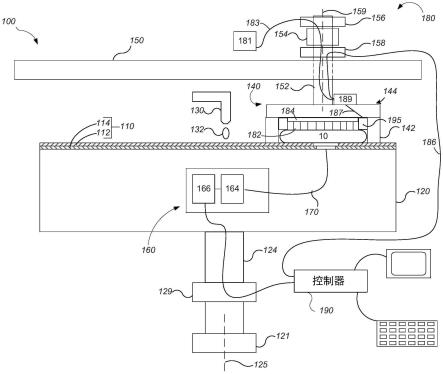
12.图1图示抛光装置的示例的示意性横截面视图。
13.图2图示承载头的示意性截面视图。
14.图3是用于控制基板的边缘区域上的压力的压力控制组件的示意性截面视 图。
15.图4a-图4c各自图示压力控制组件的另一示例。
16.图5a-图5c示意性地图示压力控制组件如何将有效力施加在基板的区域 上。
17.图6a-图6c图示图3的压力控制器组件处于不同状态下的示意性截面视 图。
18.图7a-图7f图示图4a的压力控制器组件处于不同状态下的示意性截面视 图。
19.图8a-图8f图示图4b的压力控制器组件处于不同状态下的示意性截面视 图。
20.图9a-图9c图示图4c的压力控制器组件处于不同状态下的示意性截面视 图。
21.图10是示出在抛光期间使用压力控制器组件的示例边缘轮廓控制过程的 流程图。
22.各个附图中相同的附图标记和命名指示相同的要素。
具体实施方式
23.在理想化过程中,由于承载头和工作台的旋转,基板上的抛光速率从基板 的旋转轴线将是径向均匀的。然而,在实践中,抛光过程会导致抛光速率的径 向变化。此外,要抛光的基板可能具有初始的径向的非均匀性,即,顶层具有 从基板的旋转轴线沿径向变化的初始厚度。
24.基板的不同区域之间的抛光速率变化、或基板的非均匀的初始轮廓、或这 两者会导致基板的不同区域在不同时刻达到它们的目标厚度。
25.更具体地,如果区域的抛光同时被停止,则基板的不同区域可能无法达到 期望厚度,从而导致基板的非均匀厚度的轮廓。具体而言,约为10mm宽且 始于距基板的边缘约4-6mm的环形区域(也被称为“校验标记区域”)可基 本上不经受非均匀性。具体而言,在抛光过程之后,相比基板的中心区域,校 验标记区域具有更慢的抛光速率或抛光不足。
26.用于校正校验标记区域中的抛光速率的技术是修改承载头的最外部腔室 中的压力。这改变基板的边缘区域(例如,基板的最外部15-20mm)上的压 力。然而,增加最外部腔室中的压力会导致基板处的最外部1-2mm的严重的 过度抛光。
27.然而,采用本文中描述的技术的承载头可提供对压力分布的优越控制,并 且减小基板边缘附近的非均匀性。承载头可包括压力控制组件,该压力控制组 件包括形成一个或多个可加压腔室的第一环形隔膜以及具有一个或多个向下 凸出的下杆的环形主体。任选地,环形主体可包括用于形成另一可加压环形腔 室的第二环形隔膜。在实践中,系统可利
用由环形隔膜形成的每个腔室、通过 控制器控制组件与基板之间的接触区域的尺寸和接触面积上的压力两者来调 整压力。这些腔室还可由于该另一环形腔室中的不同压力而变形。具体而言, 该另一腔室可变形以使一个或多个下杆向下位移,以接触基板的聚集区域并将 力施加到基板的该聚集区域上。该组件可将分布式力施加在基板的可控接触区 域内,或者聚集力施加在基板的可控聚集区域处,或者相应地既将分布式力施 加在基板的可控接触区域内,聚集力又施加在基板的可控聚集区域处。
28.因此,系统能以具有高分辨率的可控方式将分布式力和聚集力的各种组合 施加在基板的边缘区域中。鉴于此,系统可实现对基板中的边缘区域进行抛光 的有效控制,从而准许基板中的边缘区域的非均匀性的减小。
29.图1图示抛光装置100的示例。抛光装置100包括可旋转盘形工作台120, 抛光垫110位于该可旋转盘形工作台120上。工作台120可操作以绕轴线125 旋转。例如,电机121可以转动驱动轴124以使工作台120旋转。抛光垫110 可以例如通过粘合层可拆卸地固定至工作台120上。抛光垫110可以是具有外 抛光层112和较软的背衬层114的双层抛光垫。
30.抛光装置100可包括分配端口130,用于将抛光液(诸如,研磨浆料)递 送到抛光垫110上。抛光装置还可包括抛光垫调节器,用于研磨抛光垫110, 以将抛光垫110维持在一致的研磨状态。
31.抛光装置110可包括承载头140,该承载头140可操作以将基板10固持为 抵靠抛光垫110。承载头140可配置成对于基板10上的多个区中的每个区独立 地控制抛光参数,例如,压力。
32.承载头140从支撑结构150(例如,转盘)悬挂,并且通过驱动轴152连 接到承载头旋转电机154,使得承载头能够绕轴线155旋转。任选地,承载头 140可例如在转盘150上的滑块上、或通过转盘自身的旋转振荡而横向地振荡。 在操作中,使工作台围绕其中心轴线125旋转,并且使每个承载头围绕其中心 轴线155旋转并跨抛光垫的顶表面横向地平移。
33.承载头140可包括:壳体144,其可连接至驱动轴152;支撑板184,其可 在柔性的中央隔膜182上方延伸;环形压力控制组件195,其围绕柔性的中央 隔膜182;以及保持环142,其围绕环形压力控制组件195,以将基板10保持 在柔性的中央隔膜182下方。
34.柔性的中央隔膜182的下表面提供用于基板10的安装表面。柔性的中央 隔膜182可包括固定至支持板184的一个或多个翻板,用于形成一个或多个可 加压腔室。这些腔室通过相应的压力供应线183被连接至一个或多个压力供应 181,以便在抛光时将不同的压力施加到基板的内区域(例如,远离基板边缘 至少6mm的区域)上,使得系统可调整基板中的相应区域上的相应抛光区域。
35.压力控制组件195也可形成一个或多个可加压腔室。可加压腔室中的每一 个通过相应的压力供应线183被连接至不同的压力供应181。压力控制组件195 的详细的结构描述将在下文讨论。
36.抛光装置可进一步包括阀组件189,例如,可控地将各种腔室连接到各种 压力供应的装备。例如,阀组件可安装在承载头140的壳体144的顶部上,如 图1中所示。对于另一示例,阀组件可安装在承载头140内部的支持板184的 顶部上。替代地,如上文所讨论,每个腔室也可通过压力供应线183直接被连 接至压力供应181。
37.抛光装置可包括控制器190,用于控制形成在压力控制组件195内的每个 腔室的
压力。例如,对于其中压力阀组件189在使用中的情况,压力控制组件 的每个腔室可通过相应的压力输出线187被连接至阀组件189中的专用阀。每 个压力输出线187可由穿过壳体144的通道、或柔性管、或这两者来提供。尽 管为了易于说明在图1中仅示出一个压力输出线187,但是对于压力控制组件 195内的每个腔室将存在单独的压力输出线187。
38.阀组件189可通过多个压力供应线183从多个压力源181接收多个压力输 入。另外,虽然为了易于说明在图1中仅示出一个压力供应线183和一个压力 源181,但是可存在更多压力供应线,例如,八个至十六个压力供应线,并且 可存在更多压力源,例如,八个至十六个压力源。压力供应线183可由穿过驱 动轴185和/或壳体144的通道、和/或由柔性管、以及由延伸穿过壳体144的 旋转接头214提供。压力可从固定式部件(例如,压力源183)通过旋转气动 接头156被引导至承载头140。
39.图2图示承载头140的示意性截面视图。承载头184包括支撑板184以及 中央隔膜182,该中央隔膜182具有多个环形翻板204。这些翻板可通过加固 被固定至支撑板184。中央隔膜182可由柔性的且略有弹性的材料制成,该材 料例如,橡胶,诸如,硅酮橡胶或氯丁橡胶。该隔膜可通过使用模具使得经模 制的隔膜形成为单个主体而由热固性材料形成。
40.在一些实现方式中,支撑板184通过由塑料或橡胶(例如,硅橡胶或氯丁 橡胶)形成的挠曲部210(例如,环形隔膜)被耦合至壳体144。挠曲部210 的内边缘可被夹持在支撑板184的顶部与夹环212之间,并且挠曲部的外边缘 可被夹持在保持环142与壳体144之间。
41.支撑板184与壳体144之间的区域可通过可膨胀密封件220,例如,通过 柔性隔膜或波纹管而被密封,以在壳体144与支撑板184之间形成可加压上腔 室222。
42.替代地,挠曲部210可提供密封。上腔室222中的压力因此可控制支撑板 184的竖直位置、或支撑板184在中央隔膜182上的下压压力。在一些实现方 式中,上腔室222中的压力可控制抛光垫上的保持环142的压力。在一些实现 方式中,中央隔膜180直接被夹持到壳体144;分开的支撑板184被省略,并 且其功能由壳体144提供。
43.承载头140进一步包括定位在保持环142与中央隔膜182之间的环形压力 控制组件195。组件195包括致动器256,该致动器256位于壳体144下方, 例如,在挠曲部210下方。在一些实现方式中,致动器256的顶部可由挠曲部 210的底表面约束,使得致动器256的顶部不能够竖直地移动。
44.致动器256可具有可加压囊袋285,该可加压囊袋连接至相应的压力输出 线187,或直接与压力供应链183连接(未图示)。阀组件189或压力供应181 可提供或改变用于可加压囊袋285的压力。囊袋285可由可变性材料(诸如, 塑料或橡胶,例如,硅橡胶或氯丁橡胶)制成,使得囊袋285可由于囊袋内压 力的变化而变形。替代地,致动器256可由电机(例如,线性致动器、或压电 设备)提供。
45.压力控制组件195还包括环形主体254,该环形主体254通过致动器256 相对于壳体144是竖直地可移动的。环形主体254包括上部254a以及从该上 部254a向下突出的至少以一个下杆290。环形主体由硬塑料或金属制成,硬金 属例如,具有约400-500ksi的杨氏模量的聚二醚酮(peek)或聚苯硫醚(pps), 金属例如,铝或不锈钢。环形主体的上部254连接至致动器256。例如,环形 主体254的上环形杆261可延伸到由可加压囊袋285的底表面形成的凹槽中。
46.为了移动环形主体254,控制器190可增加囊袋256内的压力以使囊袋膨 胀,因此
将基本上向下的压力施加到上环形杆261上,以使环形主体254相对 于壳体144向下位移。
47.压力控制组件195进一步包括第一环形隔膜252,该第一环形隔膜252固 定至环形主体254的上部,以在第一环形隔膜252与环形主体254之间形成至 少一个下可加压腔室(例如,281和/或283),其中,至少一个下杆290位于 至少一个下可加压腔室内。第一环形隔膜252可通过夹具或粘合材料、或通过 对隔膜的弹性体包覆成型被固定到环形主体254的上部254a。第一环形隔膜 252可由具有约100psi的杨氏模量的任何适当的弹性或塑形材料制成,例如, 橡胶,例如,硅橡胶或氯丁橡胶
48.在操作中,各种腔室222、285等可被加压,使得第一环形隔膜252的底 表面处于与中央隔膜182的高度基本上相同的高度。相结合地,中央隔膜182 和环形隔膜252在抛光期间基本上覆盖基板10的整个顶表面。隔膜182、252 也可调整在基板的相应区域中施加的压力以校正局部抛光速率。在一些实现方 式中,当不在抛光基板时,在中央隔膜182与环形隔膜252之间可能存在间隙, 并且当抛光基板时,该间隙在由隔膜182和252形成的在每个腔室内的适当压 力下被闭合。
49.由第一环形隔膜252形成的一个或多个可假定的腔室281、283中的每一 个可通过相应的压力输出线187被连接至阀组件189,或者可通过相应的压力 供应线183直接被连接至相应的压力供应(未图示)。
50.由于囊袋285以及腔室281、283中的每个腔室连接至相应的压力供应, 所以基板的、通过组件195向其施加压力的区域可根据腔室的压力的总体组合 被控制。例如,第一环形隔膜252与基板之间的接触面积、或相应腔室中的至 少一个下杆290是否可接触隔膜的顶表面或在隔膜的顶表面上施加力、或这两 者取决于囊袋和每个腔室内的压力状况。压力状况可以是例如囊袋与由第一环 形隔膜形成的腔室之间的压力的比率、或在由第一环形隔膜形成的每个腔室中 的压力的比率。下文将进一步描述由于不同压力状况而导致的不同配置的细 节。
51.由第一环形隔膜形成的可加压腔室可包括两个、三个或更多个腔室。下文 将进一步描述替代结构的细节。
52.此外,下杆的数量可以是三个、五个、或更多个,并且下杆的形状可以是 矩形形状、圆柱形形状、或准许力被施加在基本上聚集的区域中的任何其他适 当的形状。下杆中的一个或多个可进一步包括在基本上水平的方向上指向的凸 缘部分,例如,凸缘部分的轴向方向在水平方向上。下文将进一步描述下杆的 替代结构的细节。
53.图3是用于控制基板的边缘区域上的压力的压力控制组件195的示意性截 面视图。
54.压力控制组件195包括环形主体254,该环形主体配置成在基板10的边缘 区域上方定位。环形主体254可包括一个或多个下杆290a、290b和290c、以 及上柱261。
55.压力控制组件195还包括固定在环形组件254上方的致动器256。致动器 256包括形成可加压囊袋285的隔膜或壳310。通过隔膜310的部分的通道或 管道325配置成连接至外部压力供应/输出管线187b。通过压力供应线187b和 通道325,可加压囊袋285可被供应特定量的压力。为了与环形主体254连接, 致动器256可包括隔膜310的底表面中的凹槽361。凹槽361配置成接合环形 主体的上杆261并被固定至环形主体的上杆261,例如,压力配合或粘合剂附 连,仅举数例。
56.压力控制组件195进一步包括固定至环形主体254的上部254a的第一环 形隔膜252,以与环形主体的下部形成一个或多个可加压腔室281、283。第一 环形隔膜252可通过任何合适的连接(例如,通过夹环305或粘合剂)固定至 环形主体254。由第一环形隔膜252形成的隔膜中的每个隔膜281、283可封围 从环形主体254向下延伸的一个或多个下杆290a、290b。
57.在初始状态期间,例如,在抛光操作之前,下杆不与隔膜252的内表面接 触。然而,下杆中的至少一个下杆配置成位移以接触隔膜252的内表面的对应 部分的聚集区域并在该聚集区域中施加力。在抛光期间,这导致聚集力在基板 的背表面上的窄的环形区中传输。下杆290中的至少一个可通过例如一个或多 个腔室281、283中的一个或多个压力变化、或囊袋285中的压力变化、或一 个或多个腔室281、283中的一个或多个压力变化和囊袋285中的压力变化两 者来位移。
58.每个腔室281和283包括通道、或管、或这两者,用于与对应的压力供应 /输出线187连接,以在每个腔室中施加相应的压力。每个通道可穿过隔膜252 或环形主体254的任何适当部分而定位。例如,通道315始于环形主体254的 顶表面基本上向下直到下杆290a的下表面而形成。作为另一示例,通道320 始于环形主体254的侧表面并水平地延伸第一部分,且随后基本上向下延伸第 二部分直到环形主体254的底表面而形成。任选地,每个通道可包括用于与相 应的压力供应线连接的管道或管。
59.对于其中抛光装置100包括阀组件189的情况,每个压力供应线187a、187b 和187c与阀组件189中的相应阀连接,以将特定压力施加到相应的腔室281、 283和285中。控制器190可通过阀组件190控制每个腔室内的压力变化,使 得组件195的最终配置相应地改变。
60.用于组件195的每个部件的上述材料、形状和配置出于易于说明的目的是 纯示例性的,并且也可采用任何其他适当的材料、设计和配置。
61.图4a-图4c各自图示压力控制组件195的另一示例。在一些实现方式中, 参考图4a中呈现的配置,压力控制组件195的环形主体254可包括固定至环 形主体254的第二环形隔膜254b,用于限定上环形腔室450。至少一个下杆290 固定至第二环形隔膜的底表面。第二环形隔膜254b配置成响应于上环形腔室 450中的压力增加而向下变形,以使至少一个下杆(例如,290b)向下位移, 从而接触第一环形隔膜252的顶表面并在第一环形隔膜252的顶表面上施加 力。
62.在一些实施例中,第一环形隔膜252固定至环形主体254,以限定单个下 腔室481。腔室285、450和481各自都是可独立地加压的,并且各自通过相应 的通道或管被连接至压力供应线。例如,上环形腔室450可使用穿过环形主体 254的某侧的通道内的管道413来与压力供应线连接。作为另一示例,腔室通 过位于唤醒主体254的另一侧上的通道415来与压力供应线连接。
63.此外,下杆中的一个下杆(例如,径向最外部的杆290a)包括在径向上向 外(从承载头的中心在径向上向外)延伸到腔室481中的凸缘291a。凸缘291a 可具有任何合适的环形轮廓。例如,凸缘291a的地表面可以是平面且水平的, 或者是平面的单相对于水平倾斜,或者是非平面的。当具有凸缘291a的杆290a 接触基板并将聚集力施加到基板上时,所施加的力应当小于没有凸缘的杆的 力。
64.在一些实现方式中,参考图4b中呈现的配置,第一环形隔膜252可形成 两个腔室
483和485,如针对图3类似地所描述。第一腔室483包括具有向内 延伸的凸缘291a的一个下杆290a,并且第二腔室485包括没有凸缘的两个下 杆290b、290c。腔室285、450、483和485中的每个腔室通过相应的通道或管 道被连接至不同的压力供应线。
65.每个下杆可具有相应的长度、宽度和深度。替代地,每个下杆在形状上可 以是基本上相同的。一个或多个下杆的底表面可配置成在初始状态下共面。替 代地,下杆的底表面可定位在不同的水平位置中。具体地,在不包括上环形腔 室450的实现方式中,杆中的两个杆可具有共面的底表面,使得由这两个杆将 压力施加在两个分开的环形区域中。另一方面,在包括上环形腔室450的实现 方式中,当上环形腔室250不被加压时,附连至第二环形隔膜的杆(例如,中 间杆290b)可较短或具有略微凹陷的底表面。
66.在一些实现方式中,参考图4c中呈现的配置,第一环形隔膜252可形成 三个腔室487、488和489,其中每个腔室具有相应的下杆。类似地,腔室285、 487、488和489中的每个腔室连接至不同的压力供应线。
67.图5a-图5c示意性地图示压力控制组件195如何将有效力施加在基板的 区域上。作为初步问题,组件195通过调整所施加的力的大小来采取与系统500 类似的方式,以将不同大小和类型的力施加在基板515的不同区域中。根据牛 顿定律,下文描述的附图中呈现的力是反应力,每个反应力具有相同的大小, 但具有与施加到基板上的对应力相反的方向。为简单起见,这些反应力也被称 为施加到基板上的力。
68.参考图5a,示意性系统500包括球形或环形囊袋520,该球形或环形囊袋 520伴随着包含压力p、置于囊袋的顶部的夹具形状的零件510、以及囊袋520 初始被置于其上的基板515而由球形或环形隔膜520形成。夹具形状的零件510 包含水平部分510a和竖直部分510b。零件510的水平部分以如下方式与囊袋 的上部接触:零件510与囊袋520之间的初始接触区域可以是基本上为点或圆 形(取决于夹具形状是否为圆形)的聚集区域。零件510的竖直部分510b初 始地不与基板515或囊袋520接触,但是配置成在施加在零件510的水平部分 上的力的作用下向下位移。囊袋在内部压力p和外部力两者作用下也是可变 形的。
69.初始地,向下的力f或基本上伴随重力的力被施加到零件510的水平部分 510a上。在囊袋520与基板515之间的接触区域510的面积内,由于力f,某 个压力525被施加在基板上。压力525的大小取决于向下的力的大小以及囊袋 520与基板515之间的接触区域501的面积。压力525等在以下描述中被称为 分布式力或载荷。
70.参考图5b,随着向下的力f的大小增加,囊袋520变形为椭圆形截面轮 廓,并且零件510及其竖直部分510b向下位移到更靠近基板515。通过囊袋施 加到基板上的压力545或分布式力随着向下的力f的增加而增加。替代地或附 加地,囊袋520与基板515之间的接触面积501可增加。囊袋与基板之间的接 触面积的变化量至少部分地取决于制成囊袋的材料的机械属性、内部压力p的 大小、以及向下的力f的大小。
71.参考图5c,向下的力f的大小进一步增加,使得囊袋520进一步变形, 并且零件的竖直部分510b进一步向下位移,从而最终在第二接触面积502内 接触基板515并在第二接触面积502内直接将力施加到基板515。如果竖直部 分510b的底表面511的轮廓是窄的,例如,不大于5mm宽,不大于3mm宽, 不大于2mm宽,则所施加的力可视为集中力、或聚集力、或更一般地,聚集 压力570。
72.在一些实现方式中,可使腔室的不同内部压力p变化,以在维持相同的外 部载荷f
的同时改变囊袋与基板之间的接触面积。因此,系统500可具有用于 使用向下的力f和内部压力p的不同组合被施加在基板中的不同区域上的更多 不同大小和类型的力,该理念在下文描述的技术中以类似方式被采用。
73.在以下说明书中将结合图6a-图6c、图7a-图7b、图8a-图8f以及图9a
‑ꢀ
图9c来描述图3和图4a-图4c中呈现的组件195的每个示例配置的不同状态。 下文将讨论结合对不同边缘区域的抛光区域的每个状态的细节。
74.图6a-图6c图示图3的压力控制器组件195处于不同状态下的示意性截 面视图。
75.往回参考图3,第一示例压力控制器组件195包括三个腔室,即,由致动 器256形成的囊袋、以及由第一环形隔膜252形成的两个腔室281和283,每 个腔室被连接至相应的压力供应p1、p2和p3。压力p1、p2和p3通过以下任 一方式是可变化的:通过可变化压力供应罐;或在控制器190的控制下,通过 经由阀组件189在不同压力供应之间进行切换。在平衡状态下,压力p1应当 与另两个压力p2和p3平衡。
76.参考图6a,组件195处于第一状态,在该第一状态下,无一下杆位移并 与第一隔膜接触。因此,在该第一状态下,组件195仅将分布式力610和620 施加在基板10上,其中,压力610和620的大小等于对应腔室内的压力p3和 p2。第一状态也被称为宽接触贴片。
77.参考图6b,组件195现在处于第二状态。为了从第一状态变化为第二状 态,组件195增加p2和p3的压力,使得在平衡状态下,第一环形隔膜与基板 之间的接触面积减小。在平衡中,增加的p2和p3乘以减小的接触面积等于 p1乘以上杆的接触表面。在一些实现方式中,只要(p2+p3)相比p1的比率 增加,组件195就可将p1、p2和p3一起增加以达到第二状态。在第二状态下, 组件195可将增加量的压力630和640施加到基板中的较小区域上,从而增加 该较小区域中的抛光率。压力630和640的大小分别基于每个腔室中的压力 p3和p2。第二状态也被称为窄接触贴片。
78.参考图6c,组件195现在处于第三状态。为了从第一状态变化为第三状 态,组件195增加压力p1,以使一个或多个下杆向下位移,从而接触第一隔 膜并将力施加到第一隔膜上。由于下杆与第一隔膜之间的接触面积是小的,因 此组件195最终可将相对集中的力施加到基板上。例如,环形主体的中央杆接 触第一隔膜,并且随后将集中力660施加到基板上。只要(p2+p3)相比p1 的比率减小,组件就可替代地将p1、p2和p3一起增加,并且p1相比p2和 p3足够大,从而使杆中的一个杆位移以与第一隔膜接触。施加在基板上的其 他力是各自取决于每个腔室内的内部压力p3和p2的分布式力650和670。在 第三状态下,组件195可将分布式载荷和分布式力两者施加在边缘区域上。更 具体地,组件195可通过集中力660、以聚集方式控制(例如,增加)基板边 缘的中心区域的抛光速率。第三状态也被称为中心聚集的宽接触贴片。
79.图7a-图7f图示图4a的压力控制器组件195处于不同状态下的示意性截 面视图。
80.往回参考图4a,第二示例压力控制器组件195包括三个腔室,即,由致 动器256形成的囊袋、由第一隔膜形成的单个腔室481、以及由第二环形隔膜 (例如,环形主体254)形成的腔室450。每个腔室被连接至相应的压力供应 p1、p2和p5,并且压力p1、p2和p5是可互换的以允许组件195达到不同状 态。
81.参考图7a,组件195处于第一状态,在该第一状态下,无一下杆位移并 与第一隔膜接触。因此,在该第一状态下,组件195仅将均匀的分布式力710 施加在基板10上,其中,压
力710的大小等于对应腔室内481的压力p2。第 一状态也被称为宽接触贴片。
82.参考图7b,组件195处于第二状态。在第二状态下,无一下杆与第一隔 膜接触,并且组件将均匀的分布式载荷715施加到基板10的较小区域上(与 第一状态相比)。为了从第一状态变化为第二状态,组件195可减小p1相比 p2的比率,并保持p5小于p2。第二状态也被称为窄接触贴片,用于在抛光时 控制较小的边缘区域的抛光速率。
83.参考图7c,组件195处于第三状态。在第三状态下,最外部的下杆290a 向下位移,并且最终接触第一隔膜并将集中力720施加在第一隔膜上。因此, 组件195将均匀的分布式载荷725和集中力720两者施加到基板10上。为了 从第一状态变化为第三状态,组件195增加p1相比p2的比率,并且保持压力 p5小于压力p2。第三状态也被称为外部聚集加宽接触贴片,用于将较高压力 施加在外边缘区域,同时仍跨宽面积施加压力。
84.参考图7d,组件195处于第四状态。在第四状态下,中央下杆290b向下 位移,并且最终接触第一隔膜并将集中力730施加在第一隔膜上。因此,组件 195将均匀的分布式载荷735和集中力730两者施加到基板10上。为了从第一 状态变化为第四状态,组件195增加压力p5相比p2的比率。第四状态也被称 为中心聚集加宽接触贴片,用于将较高压力施加在中心区域,同时仍跨宽面积 施加压力。
85.参考图7e,组件195处于第五状态。在第五状态下,最外部的下杆290a 和中央下杆290b两者都向下位移,并且最终接触第一隔膜并将集中力740和 745施加在第一隔膜上。因此,组件195将均匀的分布式载荷750施加在边缘 区域中,将集中力740施加在外边缘区域中,并且将另一集中力745施加在基 板10的中心边缘区域中。为了从第一状态变化为该状态,组件195增加压力 p1相比压力p2、或相比p5、或相比p2+p5的比率,并且增加压力p5相比p2 的比率。第五状态也被称为外部和中心聚集的宽接触贴片,用于将更集中的压 力施加在外边缘区域和中心边缘区域两者上。
86.参考图7f,组件195处于第六状态。仅中央下杆290b向下位移,从而接 触第一隔膜并将集中力755施加在第一隔膜上。因此,组件195将均匀的分布 式载荷760施加在边缘区域中,并将集中力755施加在基板10的中心边缘区 域中。为了变化为该状态,组件减小压力p1相比压力p2和p5两者的比率, 并且增加压力p5相比p2的比率。第六状态也被称为中心聚集加窄接触贴片, 用于将较高压力施加在中心边缘区域上,但具有较窄的总控制区域(相比图 7d)。
87.图8a-图8f图示图4b的压力控制器组件195处于不同状态下的示意性截 面视图。
88.往回参考图4b,第三示例压力控制器组件195包括四个腔室,即,由致 动器256形成的囊袋、由第一隔膜形成的腔室483和485、以及由第二环形隔 膜254b(或环形主体254)形成的腔室450。每个腔室被连接至相应的压力供 应p1、p2、p3和p5,并且压力p1、p2、p3和p5是可互换的以准许组件195 达到不同状态。
89.参考图8a,组件195处于第一状态,在该第一状态下,无一下杆位移并 与第一隔膜接触。因此,在第一状态下,组件195仅将分布式压力805和810 施加在基板10的外边缘区域和内边缘区域中。每个压力805和810的大小等 于对应的压力p3和p2。第一状态也被称为宽接触贴片。
90.参考图8b,组件195处于第二状态。在第二状态下,无一下杆与第一隔 膜接触。因此,组件将分布式载荷815和820施加到基板10的较小的内区域 和外区域上。为了从第一状
态改变为第二状态,组件195可增加p2+p3相比 p1的比率,并保持p5小于p2+p3。第二状态也被称为窄接触贴片,用于在抛 光时控制较小的边缘区域的抛光速率。
91.参考图8c,组件195处于第三状态。在第三状态下,最外部的下杆290a 向下位移,从而最终接触第一隔膜并将集中力825施加在第一隔膜上。因此, 组件195将均匀的分布式载荷830、835施加在外边缘区域和内边缘区域中, 并将集中力825施加到基板10上。为了从第一状态变化为该状态,组件195 增加p1相比p2、或相比p3、或相比p2+p3的比率,并且保持压力p5小于压 力p2。第三状态也被称为外部聚集加宽接触贴片,用于将较高压力施加在外 边缘区域,同时仍跨宽面积施加压力。
92.参考图8d,组件195处于第四状态。在第四状态下,中央下杆290b向下 位移,从而最终接触第一隔膜并将集中力845施加在第一隔膜上。因此,组件 195将均匀的分布式载荷840、850施加在外边缘区域和内边缘区域中,并将集 中力845施加到基板10上。为了从第一状态变化为该状态,组件195增加压 力p5相比p2、或相比p3、或相比p2+p3的比率。第四状态也被称为中心聚 集加宽接触贴片,用于将较高压力施加在中心区域,同时仍跨宽面积施加压力。
93.参考图8e,组件195处于第五状态。在第五状态下,最外部的下杆290a 和中央下杆290b两者都向下位移,从而接触第一隔膜并将集中力855和865 施加在第一隔膜上。因此,组件195将均匀的分布式载荷860、870施加在外 边缘区域和内边缘区域中,将集中力855施加在外边缘区域中,并且将另一集 中力865施加在基板10的中心边缘区域中。为了从第一状态变化为该状态, 组件195增加压力p1相比压力p2和p3两者比率,并且增加压力p5相比p2、 或相比p3、或相比p2+p3的比率。第五状态也被称为外部和中心聚集的宽接 触贴片,用于将更集中的压力施加在外边缘区域和中心边缘区域两者上。
94.参考图8f,组件195处于第六状态。在第六状态下,仅中央下杆290b向 下位移,从而接触第一隔膜并将集中力880施加在第一隔膜上。因此,组件195 将均匀的分布式载荷875和885施加在外边缘区域和内边缘区域中,并将集中 力880施加在基板10的中心边缘区域中。为了从第一状态变化为该状态,组 件195增加压力p1相比压力p2和p3两者比率,并且增加压力p5相比p2、 或相比p3、或相比p2+p3的比率。第六状态也被称为中心聚集加窄接触贴片, 用于将较高压力施加在中心边缘区域上,但具有较窄的总控制区域(相比图 8d)。
95.图9a-图9c图示图4c的压力控制器组件195处于不同状态下的示意性截 面视图。
96.往回参见图4c,第四示例压力控制器组件195包括四个腔室,即,由致 动器256形成的囊袋、以及由第一隔膜形成的腔室487、488和489。任选地, 组件195可包括由环形主体254的第二隔膜254b形成的另一腔室(未图示)。 每个腔室被连接至相应的压力供应p1、p2、p3和p4,并且压力p1、p2、p3 和p4是可互换的以准许组件195达到不同状态。
97.参考图9a,组件195处于第一状态,在该第一状态下,无一下杆位移并 与第一隔膜接触。因此,在第一状态下,组件195仅将分布式压力905、910 和915施加在基板10的三个边缘区域中。每个压力905、910和915的大小等 于对应的压力p4、p3和p2。第一状态也被称为宽接触贴片。
98.参考图9b,组件195处于第二状态。在第二状态下,无一下杆与第一隔 膜接触,并且中央腔室488不与基板10接触因此,组件195将分布式载荷940 和945施加到基板10的具有较小面积的两个区域(即,内区域和外区域)上。 为了从第一状态改变为第二状态,组件
195可减小p1相比p2、或相比p4、或 相比p2+p4的比率。任选地,组件195也可减小压力p3相比p1、或相比p2、 或相比p4、或相比p1、p2和p4的任何组合的比率。第二状态也被称为窄接 触贴片,用于在抛光时控制较小的边缘区域的抛光速率。
99.参考图9c,组件195处于第三状态。在第三状态下,最外部的下杆向下 位移,接触第一隔膜并将集中力925施加在第一隔膜上。因此,组件195将均 匀的分布式载荷920、930和935施加在外边缘区域、中心边缘化区域和内边 缘区域中,并将集中力825施加在基板10的外部区域中。为了从第一状态变 化为该状态,组件195增加压力p1相比p2的比率,并且任选地增加压力p1 相比p3、或相比p4的比率。第三状态也被称为外部聚集的宽接触贴片,用于 将更集中的压力施加在外边缘区域上。
100.图10是示出在抛光期间使用压力控制器组件的示例边缘轮廓控制过程 1000的流程图。过程可由位于一个或多个地方的一个或多个计算机执行。替代 地,过程1000可被存储为一个或多个计算机中的指令。一旦被执行,这些指 令就可使抛光装置的一个或多个部件执行该过程。例如,如图1中所示的控制 器190或包括该控制器190的原位监测系统160可执行过程1000。在一些实现 方式中,原位监测系统160可包括光学监测系统,例如,光谱照相监测系统。 在其他实现方式中,原位监测系统160可包括涡流监测系统。
101.如图1中所示,原位监测系统160包括传感器164和电路166,该电路耦 合至该传感器,用于发送和接收与控制器190(例如,计算机)之间的信号。 传感器164可以是例如用于收集用于光学监测系统的光的光纤的端、或涡流监 测系统的芯和线圈。电路系统166的输出可以是数字电子信号,该数字电子信 号通过驱动轴124中的旋转耦合器129(例如,滑环)传递到控制器190。替 代地,电路166可通过无线信号与控制器190通信。
102.系统首先接收表示针对抛光后的基板的期望厚度轮廓的数据。期望厚度轮 廓可以通过用户输入接口、由用户请求指定,或者可被编码在由控制器190执 行的计算机程序中。控制器190因此可根据所接收的数据确定基板的边缘区域 的期望厚度(1002)。
103.系统确定基板的边缘区域的所测量的厚度(1004)。更具体地,对于每个 测量,控制器190可计算表征值。表征值典型地是处于抛光下的层的厚度,但 也可以是相关的特性,诸如,去除的厚度。此外,表征值可以是除厚度以外的 物理属性,例如,金属线电阻此外,表征值可以是基板通过抛光工艺的进展的 更一般的表示,例如,索引值,其表示在预定进展之后的抛光过程中将预取观 察到光谱所处于的时刻或工作台旋转的数量。系统随后可确定当前抛光速率与 期望抛光速率之间的差异,以在抛光之后在基板的边缘区域中达到期望的厚度 轮廓。
104.作为响应,系统可周期性地作出对抛光速率的调整。在一些实现方式中, 系统按计划以预定速率调整抛光速率,该预定速率例如,每个给定的转数,例 如,每5转至50转,或每个给定的秒数,例如,每2秒至20秒。在一些理想 的情况下,在预先安排的调整时刻,调整可以为零。在其他实现方式中,能以 原位地确定的速率作出调整。例如,如果边缘区域的所测量的厚度与期望的厚 度轮廓显著地不同,则控制器190和/或计算机可决定进行针对抛光速率的频率 调整。
105.为了以给定的调整速率调整处于抛光下的基板的边缘区域处的抛光速率, 控制器190可在确定了具有不同类型和大小的载荷的不同组合之后施加该组 合。
106.因此,响应于确定了差异,系统确定要施加在基板的边缘区域的加载面积 上的载
荷的组合(1006)。更具体地,系统可确定载荷类型(集中力和分布式 力)或组件模式(例如,如上文所描述的宽接触贴片、窄接触贴片、中心聚集 的宽接触贴片、外部聚集的宽接触贴片、或外部-中心聚集的宽接触贴片), 以调节基板的相应边缘区域上的抛光速率,从而在抛光后基本上实现晶片内均 匀性。
107.在确定了载荷大小、载荷类型或组件模式之后,控制器190控制阀组件189 或压力供应罐181,以改变一个或多个腔室中的一个或多个压力,从而达到所 确定的载荷或组件模式(1008)。因此,在抛光基板时,系统可精确地控制边 缘区域的相应部分处的抛光速率。
108.如在本说明书中所使用,术语基板可包括例如,产品基板(例如,其包括 多个存储器或处理器管芯)、测试基板、裸基板和选通基板。基板可以处于集 成电路制造的各种阶段,例如,基板可以是裸晶片,或者基板可包括一个或多 个经沉积和/或图案化的层。术语基板可包括圆盘和矩形薄片。
109.可以在各种抛光系统中应用上述的抛光装置和方法。抛光垫、或承载头、 或这两者可移动,以提供抛光表面与基板之间的相对运动。例如,工作台可以 绕轨道运行,而不是旋转。抛光垫可以是固定到工作台的圆形的(或某个其他 形状的)垫。端点检测系统的一些方面可适用于线性抛光系统,例如,其中抛 光垫是线性移动的连续的或卷对卷的带。抛光层可以是标准(例如,具有或不 具有填料的聚氨酯)抛光材料、软材料或固定研磨材料。使用相对定位的术语; 应当理解,抛光表面和基板能以竖直取向或某个其他取向来固持。
110.对本说明书中描述的各种系统和过程、或其部分的控制能以计算机程序产 品来实现,该计算机程序产品包括存储在一个或多个非瞬态计算机可读介质中 的指令,并且这些指令在一个或多个处理设备上是可执行的。本说明书中描述 的系统、或其部分可以作为装置、方法或电子系统来实现,这些装置、方法或 电子系统可包括一个或多个处理设备和存储器,该存储器存储用于执行本说明 书中所描述的操作的可执行指令。
111.尽管本说明书包含许多特定实现细节,但是这些实现细节不应被解读为对 任何发明的范围或者可能要求保护的内容的范围的限制,而应被解读为对可特 定于具体发明的具体实施例的特征的描述。也可将在本说明书中在单独的各实 施例的上下文中所描述的某些特征按组合实现在单个实施例中。反之,也可单 独地在多个实施例中、或在任何合适的子组合中实现在单个实施例的上下文中 所描述的各种特征。此外,虽然在上文中可能将特征描述为以某些组合的方式 起作用且甚至最初是如此要求保护的,但是,在一些情况下,可将来自所要求 保护的组合的一个或多个特征从组合中删除,并且所要求保护的组合可以针对 子组合或子组合的变型。
112.因此,己经描述了主题的具体实施例。其他实施例在所附权利要求的范围 内。
113.其他实施例在所附权利要求的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1