一种除锈装置及除锈工艺的制作方法
1.本技术涉及除锈设备技术领域,尤其是涉及一种除锈装置及除锈工艺。
背景技术:
2.钢结构是由钢制材料组成结构,是主要建筑结构类型之一。结构主要由型钢和钢棒等制成钢梁、钢柱、钢桁架等构件组成,并采用硅烷化、纯锰磷化、水洗烘干、镀锌等除锈防锈工艺。各构件或部件之间通常采用焊缝、螺栓或铆钉连接。因其自重较轻,且施工简便,广泛应用于大型厂房、场馆、超高层等领域。钢结构容易锈蚀,一般钢结构要除锈、镀锌或涂料,且要定期维护。
3.相关技术中,一般是通过手工握持手持式的除锈设备对钢结构进行除锈,操作人员在对钢筋或钢管等圆柱体形状钢结构进行除锈时,需要手动推动除锈设备,使钢筋或钢管与除锈设备发生相互移动,较为费时费力,间接降低了除锈效率。
技术实现要素:
4.为了提高除锈效率,本技术提供一种除锈装置及除锈工艺。
5.本技术提供的一种除锈装置及除锈工艺采用如下的技术方案:其中一方面,一种除锈装置,包括截面呈u型设置的机体,所述机体上设置有承载杆,所述承载杆用于放置钢棒,所述机体上设置有除锈组件和滑移组件;所述除锈组件包括承载板和两个磨轮,所述机体上设置有导向杆,所述承载板活动套接于所述导向杆上,所述承载板沿所述机体的长度方向滑移,两个所述磨轮转动承载于所述承载板的下表面;所述滑移组件包括驱动电机、主动齿轮以及齿条,所述驱动电机安装于所述承载板的上表面,所述驱动电机的输出轴贯穿所述承载板的下表面,所述主动齿轮同轴固定于所述驱动电机的输出轴,所述齿条安装于所述机体上,所述齿条沿所述机体的长度方向设置,所述主动齿轮与所述齿条啮合,所述驱动电机与所述磨轮之间设置有第一传动组件。
6.通过采用上述技术方案,加工时,操作人员将钢棒放置于承载杆上,启动驱动电机,驱动电机的输出轴转动,进而带动主动齿轮转动,又由于主动齿轮与齿条相互啮合,且齿条沿机体的长度方向设置,以使主动齿轮相对齿条滚动,在导向杆的承载和导向的作用下,带动承载板沿钢棒的长度方向运动。
7.对应的,驱动电机的输出轴转动的同时,在第一传动组件的传动作用下,带动两个磨轮转动,两个磨轮对钢棒的两侧的锈迹进行打磨。与相关技术中,操作人员手部握持除锈设备对钢棒表面进行打磨相比,本技术中的除锈装置能够减少人为操作,省时省力,间接提高了除锈的效率。
8.优选的,所述第一传动组件包括第一皮带传动机构和两个相互啮合的传动齿轮,所述承载板的下表面转动承载有两根相互平行的转动杆,两个所述磨轮分别同轴固定于所述转动杆的底端,两个所述传动齿轮分别同轴固定于两根所述转动杆上,所述第一皮带传
动机构的其中一个皮带轮同轴固定于其中一根所述转动杆上,所述第一皮带传动机构的另一个皮带轮同轴固定于所述驱动电机的输出轴。
9.通过采用上述技术方案,启动驱动电机,驱动电机的输出轴转动,进而带动第一皮带传动机构的其中一个皮带轮转动,使得其中一个转动杆转动,又由于两个传动齿轮相互啮合,进而使得两根转动杆同步转动,且两个磨轮分别与两根转动杆的底端同轴固定,从而带动磨轮转动,对钢棒进行打磨。
10.优选的,所述第一皮带传动机构的两个皮带轮半径不同,其中与所述转动杆同轴固定的皮带轮的半径小于另一个皮带轮的半径。
11.通过采用上述技术方案,与转动杆同轴固定的皮带轮的半径小于另一个皮带轮的半径,进而使得在驱动电机的输出轴驱动承载板往复运动的过程中,间接提高了转动杆的转速,使得磨轮的转速相对应地提高,保证了磨轮打磨时所需的转速,提高了该除锈装置的工作稳定性。
12.优选的,所述机体与所述承载板之间设置有控制组件,所述控制组件包括接近传感器和处理器,所述接近传感器设置有两个,两个所述接近传感器分别安装于所述机体的两内侧壁,所述接近传感器与所述承载板位于同一水平面上,所述处理器安装于所述承载板的上表面,所述处理器、接近传感器以及驱动电机之间电连接。
13.通过采用上述技术方案,在承载板沿机体的长度方向反复运动的过程中,当承载板运动到机体的末端时,承载板靠近接近传感器,接近传感器感应到承载板,并向处理器发送信号,处理器接收到信号后,向驱动电机发送控制指令,控制驱动电机的输出轴反转,进而使得承载板能够往回运动,间接提高了该除锈装置的智能化。
14.优选的,所述机体上还设置有清扫组件,所述清扫组件包括推板和收集槽,所述推板位于所述机体的上表面,所述推板还位于所述承载杆的下方,所述推板朝向所述机体外侧做滑移运动,所述推板与所述驱动电机之间设置有第二传动组件,所述收集槽安装于所述机体的一侧。
15.通过采用上述技术方案,驱动电机驱动磨轮打磨时,钢棒表面的金属碎屑掉落至机体的上表面,同时,在第二传动组件的传动下,推板在机体的上表面做往复运动,以将落在机体上表面的金属碎屑推入收集槽,进而完成碎屑的收集,减少了金属碎屑散落至机体表面后被带向机体外侧,污染工作环境的情况发生,间接提高了该除锈装置的绿色环保性能。
16.优选的,所述第二传动组件包括一对锥齿轮和曲柄连杆机构,所述承载板的下表面垂直固定有安装板,其中一个所述锥齿轮同轴固定于所述驱动电机的输出轴,另一个所述锥齿轮转动承载于所述安装板的侧壁,所述曲柄连杆机构的转盘转动承载于所述安装板的侧壁,所述曲柄连杆机构的转盘与另一个所述锥齿轮之间设置有传动件,所述曲柄连杆机构的连杆与所述推板的顶部铰接。
17.通过采用上述技术方案,驱动电机的输出轴转动,进而带动其中一个锥齿轮转动,使得另一个锥齿轮也转动,在传动件的传动作用下,使得曲柄连杆机构的转盘转动,又由于曲柄连杆机构的连杆与所述推板的顶部铰接,进而能够带动推板往复运动。
18.优选的,所述传动件设置为第二皮带传动机构,所述第二皮带传动机构的其中一个皮带轮与其中一个所述锥齿轮同轴固定,所述第二皮带传动机构的另一个皮带轮与所述
曲柄连杆机构的转盘同轴固定。
19.通过采用上述技术方案,驱动电机的输出轴转动,以使锥齿轮转动,又由于第二皮带传动机构的其中一个皮带轮与其中一个锥齿轮同轴固定,第二皮带传动机构的另一个皮带轮与曲柄连杆机构的转盘同轴固定,进而在第二皮带传动机构的传动下,使得曲柄连杆机构的转盘转动。
20.优选的,所述安装板的侧壁固定有引导杆,所述引导杆呈水平设置,所述引导杆朝向所述收集槽设置,所述引导杆贯穿所述推板。
21.通过采用上述技术方案,引导杆朝向所述收集槽设置,引导杆贯穿推板,引导杆进一步限制了推板的运动轨迹,提高了推板的运动稳定性。
22.优选的,所述机体上设置有两块相互平行的挡板,两块所述挡板分别位于所述磨轮的两侧。
23.通过采用上述技术方案,两块挡板分别设置于磨轮的两侧,磨轮打磨钢棒时部分飞出的金属碎屑撞击挡板后,掉落至机体上表面,减少了金属碎屑飞溅至机体外侧的情况发生。
24.另一方面,一种除锈工艺,包括以下步骤:s1:操作人员将钢棒放置于承载杆上;s2:操作人员启动驱动电机,驱动电机的输出轴驱动主动齿轮转动,主动齿轮相对齿条滚动,承载台滑移;s3:磨轮转动,对钢棒进行打磨;s4:关闭驱动电机,将打磨好的钢棒从承载杆上取下。
25.综上所述,本技术包括以下至少一种有益技术效果:1. 加工时,操作人员将钢棒放置于承载杆上,启动驱动电机,在导向杆的承载和导向的作用下,带动承载板沿钢棒的长度方向运,两个磨轮对钢棒的两侧的锈迹进行打磨,减少人为操作,省时省力,间接提高了除锈的效率;2. 与转动杆同轴固定的皮带轮的半径小于另一个皮带轮的半径,进而使得在驱动电机的输出轴驱动承载板往复运动的过程中,间接提高了转动杆的转速,使得磨轮的转速相对应地提高,保证了磨轮打磨时所需的转速,提高了该除锈装置的工作稳定性;3. 在承载板沿机体的长度方向反复运动的过程中,当承载板运动到机体的末端时,承载板靠近接近传感器,接近传感器感应到承载板,并向处理器发送信号,处理器接收到信号后,向驱动电机发送控制指令,控制驱动电机的输出轴反转,进而使得承载板能够往回运动,间接提高了该除锈装置的智能化。
附图说明
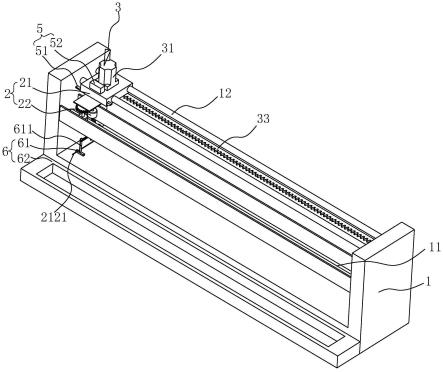
26.图1是本技术实施例的整体结构示意图。
27.图2是本技术实施例中隐藏挡板后的结构示意图。
28.图3是图2中a部分的放大示意图。
29.附图标记说明:1、机体;11、承载杆;12、导向杆;13、挡板;2、除锈组件;21、承载板;211、延伸板;2111、转动杆;212、安装板;2121、引导杆;22、磨轮;3、滑移组件;31、驱动电机;32、主动齿轮;33、齿条;4、第一传动组件;41、第一皮带传动机构;42、传动齿轮;5、控制组
件;51、接近传感器;52、处理器;6、清扫组件;61、推板;611、立杆;62、收集槽;7、第二传动组件;71、锥齿轮;72、曲柄连杆机构;8、第二皮带传动机构。
具体实施方式
30.以下结合附图1-图3对本技术作进一步详细说明。
31.本技术实施例公开一种除锈装置及除锈工艺。
32.其中一方面,参照图1和图2,一种除锈装置,包括机体1,机体1的截面呈u型设置,机体1架设于地面上,机体1相对的两个内壁垂直固定有两根承载杆11,两个承载杆11相互平行,承载杆11呈圆柱状设置,承载杆11用于承载钢棒,具体为,钢棒放置于两根承载杆11之间,机体1上还设置有除锈组件2和滑移组件3,除锈组件2用于对钢棒进行除锈,滑移组件3用于控制除锈组件2滑移。
33.参照图2和图3,具体的,除锈组件2包括承载板21和两个磨轮22,承载板21呈水平设置,承载板21位于承载杆11的上方,机体1相对的两个内壁固定有两根呈水平设置的导向杆12,两个导向杆12沿机体1的长度方向设置,承载板21活动套设于导向杆12上,对应的,滑移组件3用于驱动承载板21运动。同时,承载板21的下表面固定有延伸板211,延伸板211呈水平设置,两个磨轮22转动承载于延伸板211的下表面,两个磨轮22位于钢棒的两侧,两个磨轮22的表面具有一定的锋利度,能够打磨金属锈迹。
34.对应的,滑移组件3包括驱动电机31、主动齿轮32以及齿条33,驱动电机31通过螺栓垂直固定于承载板21的上表面,在本实施例中,驱动电机31采用控制自身输送轴正反转效果良好的伺服电机,驱动电机31的输出轴贯穿承载板21的下表面,主动齿轮32同轴固定于驱动电机31的输出轴。同时,齿条33沿机体1的长度方向设置,齿条33的两端垂直固定于机体1相对的两个内壁上,主动齿轮32与齿条33相互啮合。
35.具体的,启动驱动电机31,驱动电机31的输出轴转动,进而带动主动齿轮32转动,又由于主动齿轮32与齿条33相互啮合,以使主动齿轮32相对齿条33滚动,在导向杆12的承载和导向的作用下,带动承载板21沿钢棒的长度方向运动,以使两个磨轮22沿钢棒的长度方向运动,以对钢棒进行打磨。
36.同时,驱动电机31与磨轮22之间设置有第一传动组件4,具体的,第一传动组件4包括第一皮带传动机构41和两个相互啮合的传动齿轮42。对应的,延伸板211的下表面转动承载有两根相互平行的转动杆2111,两根转动杆2111呈竖直设置,两个磨轮22分别同轴固定于两根转动杆2111的底端,两个传动齿轮42分别同轴固定于两根转动杆2111上,传动齿轮42位于磨轮22的上方。同时,第一皮带传动机构41的其中一个皮带轮同轴固定于其中一根转动杆2111上,第一皮带传动机构41的另一个皮带轮同轴固定于驱动电机31的输出轴。
37.具体的,启动驱动电机31,驱动电机31的输出轴转动,进而带动第一皮带传动机构41的其中一个皮带轮转动,使得其中一个转动杆2111转动,又由于两个传动齿轮42相互啮合,进而使得两根转动杆2111同步转动,且两个磨轮22分别与两根转动杆2111的底端同轴固定,从而带动磨轮22转动,对钢棒进行打磨。
38.进一步的,第一皮带传动机构41的两个皮带轮半径不同,具体为,其中与转动杆2111同轴固定的皮带轮的半径小于另一个皮带轮的半径。在本实施例中,第一皮带传动机构41的两个皮带轮之间的半径比为2:1,进而使得在驱动电机31的输出轴驱动承载板21往
复运动的过程中,间接提高了转动杆2111的转速,使得磨轮22的转速相对应地提高,保证了磨轮22打磨时所需的转速,提高了该除锈装置的工作稳定性。
39.回看图1和图2,此外,机体1与承载板21之间设置有控制组件5,控制组件5包括接近传感器51和处理器52,接近传感器51设置有两个,两个接近传感器51分别安装于机体1的两内侧壁,接近传感器51与延伸板211位于同一水平面上,且接近传感器51的感应端朝向延伸板211。同时,处理器52安装于承载板21的上表面,处理器52、接近传感器51以及驱动电机31之间电连接。接近传感器51和处理器52为常规技术中用到的控制装置,在本实施例中,主要用于提高驱动电机31的灵敏度。
40.对应的,在本实施例中,为便于描述,将机体1的其中一端定义为承载板21运动的起点,另一端为承载板21运动的终点。操作人员启动驱动电机31,当承载板21从起点运动到终点时,延伸板211靠近位于末端的接近传感器51,接近传感器51向处理器52发送信号,处理器52接收该接近传感器51的信号后,发出指令,控制驱动电机31的输出轴反转,带动承载板21向起点运动。同理,当承载板21从终点运动回起点时,延伸板211靠近位于始端的接近传感器51,该接近传感器51同样向处理器52发送信号,处理器52接收该接近传感器51的信号后,发出指令,控制驱动电机31停止,完成除锈,进而间接提高了该除锈装置的智能化。
41.此外,机体1上还设置有清扫组件6,清扫组件6包括推板61和收集槽62,推板61位于机体1的上表面,推板61还位于承载杆11的下方,推板61朝向机体1外侧做滑移运动,推板61与驱动电机31之间设置有第二传动组件7。同时,收集槽62安装于机体1的一侧,收集槽62与机体1之间通过螺栓固定。
42.参照图2和图3,具体的,第二传动组件7包括一对锥齿轮71和曲柄连杆机构72,其中一个锥齿轮71同轴固定于驱动电机31的输出轴的端部,该锥齿轮71位于主动齿轮32的下方。对应的,承载板21的下表面垂直固定有安装板212,安装板212呈竖直设置,另一个锥齿轮71转动承载于安装板212的侧壁,两个锥齿轮71相互啮合。
43.此外,曲柄连杆机构72的转盘转动承载于安装板212的底端侧壁,曲柄连杆机构72的转盘与另一个锥齿轮71之间设置有传动件。在本实施例中,传动件设置为第二皮带传动机构8,第二皮带传动机构8的其中一个皮带轮与其中一个锥齿轮71同轴固定,第二皮带传动机构8的另一个皮带轮与曲柄连杆机构72的转盘同轴固定。同时,推板61的顶部垂直固定有立杆611,曲柄连杆机构72的连杆与立杆611的侧壁铰接。
44.具体的,驱动电机31的输出轴转动,进而带动其中一个锥齿轮71转动,使得另一个锥齿轮71也转动,在传动件的传动作用下,使得曲柄连杆机构72的转盘转动,又由于曲柄连杆机构72的连杆与推板61的顶部铰接,进而能够带动推板61往复运动,以将落在机体1上表面的金属碎屑推入收集槽62,进而完成碎屑的收集,减少了金属碎屑散落至机体1表面后被带向机体1外侧,污染工作环境的情况发生,间接提高了该除锈装置的绿色环保性能。
45.进一步的,为提高推板61的运动稳定性,使得推板61的运动清洁效果更佳,本技术采用以下方案:具体的,安装板212的侧壁固定有引导杆2121,引导杆2121沿机体1的宽度方向设置,引导杆2121朝向收集槽62设置,且引导杆2121贯穿立杆611,以进一步限制了推板61的运动轨迹,提高了推板61的运动稳定性。
46.回看图1,此外,机体1相对的两个内壁之间还固定有两块相互平行的挡板13,两块
挡板13均呈竖直设置,且两块挡板13分别位于磨轮22的两侧。磨轮22打磨钢板时部分飞出的金属碎屑撞击挡板13后,掉落至机体1上表面,减少了金属碎屑飞溅至机体1外侧的情况发生。
47.本技术实施例一种除锈装置及除锈工艺的实施原理为:加工时,操作人员将钢棒放置于承载杆11上,启动驱动电机31,驱动电机31的输出轴转动,进而带动主动齿轮32转动,又由于主动齿轮32与齿条33相互啮合,且齿条33沿机体1的长度方向设置,以使主动齿轮32相对齿条33滚动,在导向杆12的承载和导向的作用下,带动承载板21沿钢棒的长度方向运动。对应的,驱动电机31的输出轴转动的同时,在第一传动组件4的传动作用下,带动两个磨轮22转动,两个磨轮22对钢棒的两侧的锈迹进行打磨。与相关技术中,操作人员手部握持除锈设备对钢棒表面进行打磨相比,本技术中的除锈装置能够减少人为操作,省时省力,间接提高了除锈的效率。
48.另一方面,一种除锈工艺,采用上述的除锈装置实施,包括以下步骤:s1:操作人员将钢棒放置于承载杆11上;s2:操作人员启动驱动电机31,驱动电机31的输出轴驱动主动齿轮32转动,主动齿轮32相对齿条33滚动,承载台滑移;s3:磨轮22转动,对钢棒进行打磨;s4:关闭驱动电机31,将打磨好的钢棒从承载杆11上取下。
49.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1