一种管道内壁除锈施工工艺的制作方法
本发明涉及一种管道防腐施工技术,特别是一种管道内壁除锈施工工艺。
背景技术:
1、目前数量众多的液体运输管道大部分都是采用钢材制作而成,在没有进行防腐处理的情况下,不可避免的会出现锈蚀的现象,严重影响管道的使用寿命,所以必须对管道进行防腐处理。然而在众多的防腐处理手段中都需要先除去管道内壁的铁锈,然后才能进行防腐涂料的涂刷作业,传统的人工使用砂纸除锈的效率较低,并且工人作业环境非常恶劣,铁锈粉尘较多,劳动强度较大,可能会导致工人受到健康损害,所以亟需一种能够在管道内部进行除锈的自动控制的装置进行管道的除锈施工。
技术实现思路
1、本发明要解决的技术问题是针对现有技术的不足,提出了一种大大提高施工效率的管道内壁除锈施工工艺。
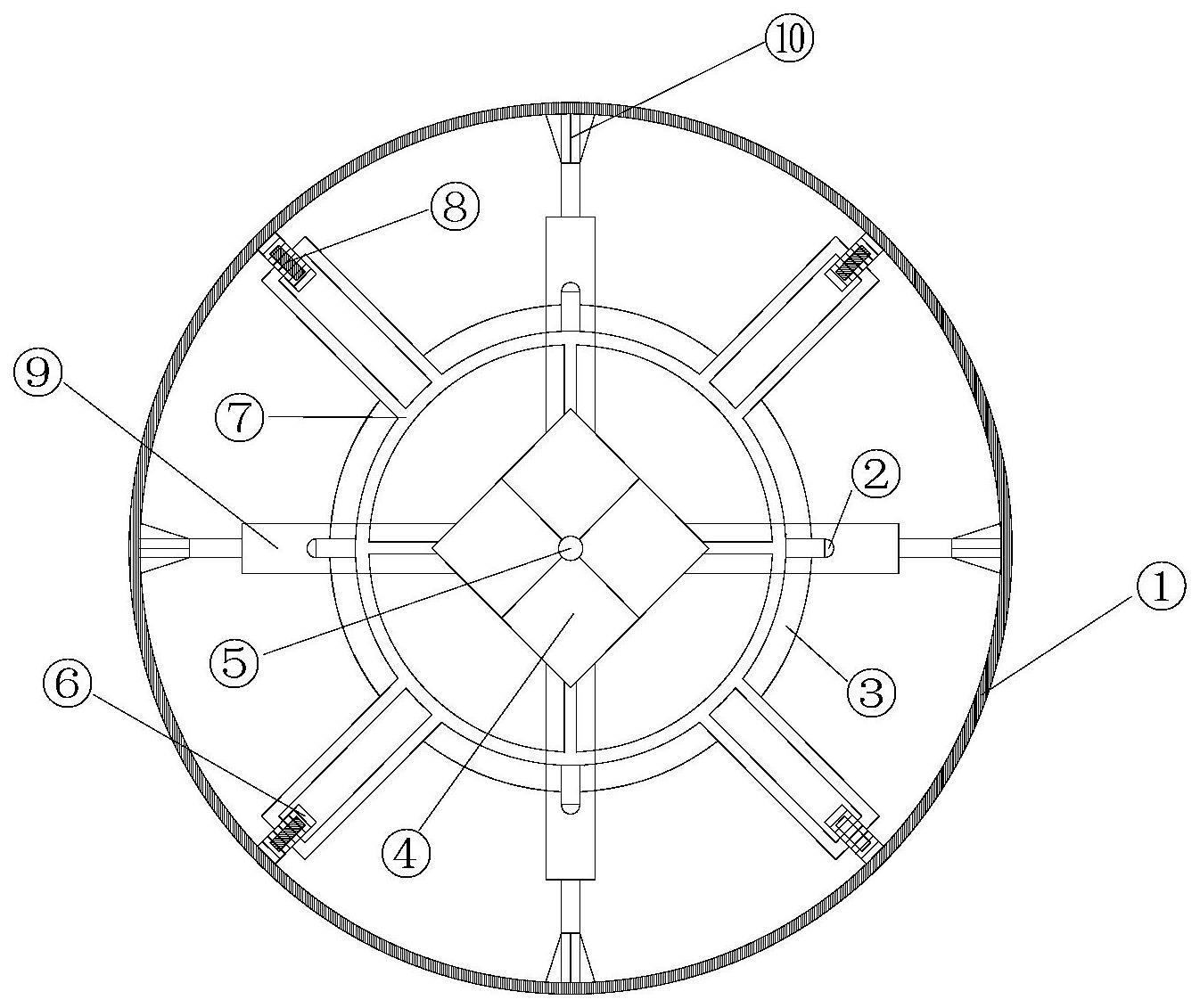
2、本发明要解决的技术问题是通过以下技术方案来实现的,一种管道内壁除锈施工工艺,其特点是:设有除锈小车,所述除锈小车设有车架,车架向四周呈放射性设置有至少三条支撑臂,支撑臂的外端部装有可沿管道轴向行走的履带式行走系统,支撑臂的长度可调,支车架上装有两组旋转除锈机构,
3、所述履带式行走系统包括可磁化的履带体及行走轮组,在履带体包裹的中间空腔处装有电磁铁,通电后可磁化履带体实现与管道内壁磁性稳固连接,
4、旋转除锈机构包括旋转电机带动的伸缩臂,伸缩臂的端部装有钢丝刷;
5、两组旋转除锈机构的伸缩臂旋转中心同轴设置且两者旋向相反;
6、车架上装有照明系统、摄像头和信号收发装置;
7、具体施工步骤如下:
8、(1)除锈小车安放至管道内部
9、首先根据需要除锈施工管道内部的直径进行调整钢丝刷旋转伸缩臂的长度,使得钢丝刷能够正好紧贴管道内壁,然后调整好履带式行走系统支撑臂的长度,使得履带正好和钢管内壁紧密接触,随后测试装置的控制信号收发装置是否能够正常工作,测试摄像头图像质量是否清晰,一切准备工作进行完毕之后,将装置放入管道内部;
10、(2)除锈施工
11、除锈小车放入管道内部之后,通过电池组内部安装的无线信号收发装置控制装置的运动,装置运动至指定位置之后,关闭履带式行走系统,接通电磁铁的开关,使得整个履带保持磁性,从而使履带和管道内壁紧密接触,为后续的钢丝刷除锈做准备;位置定位固定完毕之后,开启旋转电机,通过两个旋转方向相反的高速运动的旋转电机带动钢丝刷旋转伸缩臂运动,利用钢丝刷在管道内壁进行持续打磨实现管道内壁的除锈施工,同时开启照明灯和摄像机,实时传输除锈施工的画面至操作监控端,通过监控除锈效果是否满足要求来决定除锈时间和旋转次数,对除锈不合格的部位进行反复除锈;定位位置的管道内壁除锈施工完毕之后,首先关闭旋转电机,然后断开电磁铁的开关,启动履带式行走系统,向前运动,最终实现全部管道内壁的除锈施工;
12、(3)装置撤出管道
13、在;完成全部管道内壁的除锈施工之后,关闭;旋转电机和摄像头以及照明灯的开关,将除锈小车从管道内壁中取出,结束管道内壁除锈施工作业流程。
14、本发明要解决的技术问题还可以通过以下技术方案来进一步实现, 所述车架上装有自供电电池组。
15、本发明要解决的技术问题还可以通过以下技术方案来进一步实现,所述履带式行走系统设置为四个,并通过四条支撑臂与车架相接。
16、本发明要解决的技术问题还可以通过以下技术方案来进一步实现,所述旋转除锈机构的伸缩臂设置有四个呈放射线形均匀布置,四个伸缩臂根部固定连接为一体与旋转电机的转动轴相接。
17、本发明要解决的技术问题还可以通过以下技术方案来进一步实现,履带式行走系统的履带体呈三角形设置,履带体内设有上角轮和两个底轮,在两个底轮之间设有两个传动导轮。
18、本发明与现有技术相比,本发明能够提高管道内壁除锈施工的工作效率,缩短除锈施工作业的时间;能够降低人工除锈时工人在管道内部工作的风险,装置在管道内部除锈能够实现无人施工,工人能够在安全环境下操作除锈装置的运动,减少了发生安全事故的可能;能够实时监控管道内部除锈施工的作业效果,能够确保管道内壁的全部施工区域都满足施工要求,提高了管道内壁除锈施工的施工质量。其结构简单,施工可靠性高,并且采用电磁铁和管道固定,确保了装置施工过程中的稳定作业。
技术特征:
1.一种管道内壁除锈施工工艺,其特征在于:设有除锈小车,所述除锈小车设有车架,车架向四周呈放射性设置有至少三条支撑臂,支撑臂的外端部装有可沿管道轴向行走的履带式行走系统,支撑臂的长度可调,支车架上装有两组旋转除锈机构;
2.根据权利要求1所述的管道内壁除锈施工工艺,其特征在于:所述车架上装有自供电电池组。
3.根据权利要求1所述的管道内壁除锈施工工艺,其特征在于:所述履带式行走系统设置为四个,并通过四条支撑臂与车架相接。
4.根据权利要求1所述的管道内壁除锈施工工艺,其特征在于:所述旋转除锈机构的伸缩臂设置有四个呈放射线形均匀布置,四个伸缩臂根部固定连接为一体与旋转电机的转动轴相接。
5.根据权利要求1所述的管道内壁除锈施工工艺,其特征在于:履带式行走系统的履带体呈三角形设置,履带体内设有上角轮和两个底轮,在两个底轮之间设有两个传动导轮。
技术总结
一种管道内壁除锈施工工艺,设有除锈小车,所述除锈小车设有车架,车架向四周呈放射性设置有至少三条支撑臂,支撑臂的外端部装有可沿管道轴向行走的履带式行走系统,支车架上装有两组旋转除锈机构,所述履带式行走系统包括可磁化的履带体及行走轮组,在履带体包裹的中间空腔处装有电磁铁,通电后可磁化履带体实现与管道内壁磁性稳固连接,旋转除锈机构包括旋转电机带动的伸缩臂,伸缩臂的端部装有钢丝刷;两组旋转除锈机构的伸缩臂旋转中心同轴设置且两者旋向相反;直接解放了繁重的除锈工人的体力劳动,大大加快了管道内壁的除锈效率,并且能够通过摄像装置实时检查除锈施工效果,同时也不用担心铁锈粉尘导致的空气质量问题。
技术研发人员:皋黎明,范旭征博,陈锟,绳彬,程加军,韩晓洁,练学标
受保护的技术使用者:中交第三航务工程局有限公司江苏分公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!