一种半自动淬火转移机械手臂的制作方法
1.本实用新型涉及淬火设备技术领域,尤其涉及一种半自动淬火转移机械手臂。
背景技术:
2.热处理是指材料在固态下,通过加热、保温和冷却的手段,以获得预期组织和性能的一种金属热加工工艺。
3.在热处理实验中,常遇到重量较大无法人工出炉淬火的样品,经常需要2-3人一同出炉淬火,费力、费时,并且容易出现样品掉落发生意外,或淬火延迟时间超过作业指导书的要求,大大提高了危险系数。
技术实现要素:
4.鉴于以上问题,本实用新型提供一种半自动淬火转移机械手臂。
5.为了达到上述发明目的,本实用新型采用的技术方案如下:
6.提供一种半自动淬火转移机械手臂,包括底座、机架、第一手臂、第二手臂和挂钩,机架固定设置在底座的顶壁上,第一手臂沿竖直方向滑动设置机架上,第二手臂的一端铰接在第一手臂远离机架的一端,挂钩铰接在第二手臂远离第一手臂的一端;
7.其中,机架上设置有用于驱使第一手臂竖直升降的升降机构,第一手臂上设置有用于驱使第二手臂相对第一手臂转动的第一驱动机构,第二手臂上设置有用于驱使挂钩相对第二手臂转动的第二驱动机构。
8.进一步地,机架上竖直开设有滑槽,第一手臂靠近机架的一端固定设置有滑块,并且滑块竖直滑动连接在滑槽内,升降机构包括升降气缸,升降气缸固定设置在机架上,升降气缸用于驱使滑块在滑槽内竖直滑动。
9.进一步地,第一驱动机构包括第一气缸,第一气缸转动连接在第一手臂上,第一气缸的活塞杆与第二手臂转动连接。
10.进一步地,第二驱动机构包括第二气缸,第二气缸转动连接在第二手臂上,第二气缸的活塞杆与挂钩转动连接。
11.进一步地,还包括工作台,工作台用于控制升降气缸、第一气缸和第二气缸动作。
12.进一步地,底座的底部固定设置有多个滑轮,机架上固定设置有握把。
13.进一步地,底座上竖直螺纹连接有支杆,支杆的顶端位于底座的上方,并且固定连接有把手,支杆的底端为位于底座的下方,并且铰接有防滑支脚。
14.本实用新型的有益效果为:1.通过控制第一手臂升降、第二手臂相对第一手臂伸展,以及挂钩相对第二手臂转动,可以配合将位于加热炉中沉重且高温的工件从加热炉中取出,工件取出操作省力方便,并且安全系数高;
15.2.利用底座下方的滑轮以及机架上的握把,工作人员可以方便推动机械手臂在厂房内移动,方便对不同加热炉中的工件进行吊取,以及方便对工件进行转移。
附图说明
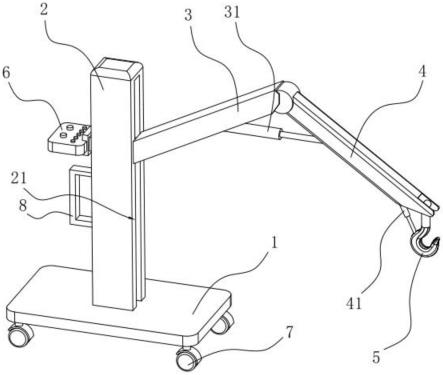
16.图1为本技术实施例1的机械手臂的整体结构示意图。
17.图2为本技术实施例2的机械手臂的整体结构示意图。
18.其中,1、底座;11、支杆;12、把手;13、防滑支脚;2、机架;21、滑槽;3、第一手臂;31、第一气缸;4、第二手臂;41、第二气缸;5、挂钩;6、工作台;7、滑轮;8、握把。
具体实施方式
19.为了更好地理解上述技术方案,下面将结合说明书附图以及具体的实施方式对上述技术方案进行详细的说明。
20.实施例1
21.本技术实施例公开一种半自动淬火转移机械手臂,参照图1,包括底座1、机架2、第一手臂3和第二手臂4。底座1用于稳固放置在地面上,机架2竖直焊接固定在底座1的顶壁上,机架2上沿竖直方向开设有滑槽21,第一手臂3的一端通过焊接固定有滑块,滑块竖直滑动安装在机架2上的滑槽21内,机架2上设有用于驱使滑块在滑槽21中竖直上下移动的升降机构。第一手臂3的另一端斜向上远离机架2,第二手臂4的一端铰接在第一手臂3远离机架2的一端,第一手臂3上设用于驱使第二手臂4相对第一手臂3转动的第一驱动机构,在第二手臂4远离第一手臂3的端部铰接有挂钩5,第二手臂4上设有用于驱使挂钩5转动的第二驱动机构。
22.其中,第二手臂4两端的铰接轴均水平,且相互平行,挂钩5的开口朝向远离机架2的一侧。工作人员可以通过启动升降机构、第一驱动机构以及第二驱动机构,可以先将第一手臂3下降到靠近加热炉的位置,再驱使第二手臂4向前伸展,以使挂钩5靠近加热炉中的工件,最后驱使挂钩5向前伸展,使挂钩5钩入工件上的挂耳等吊装结构中。最后,第一机械臂上升,使工件从加热炉中上升,并且第二手臂4收回,即可将工件从加热炉中转移出来。操作设备过程中,工作人员可以在设备一侧,以有线或无线等方式控制各个机构运作,对工件的取出操作省力、快捷,并且与工件无近距离接触,安全系数高。
23.在本技术实施例中,升降机构可以采用升降气缸(图中未示出),升降气缸可以安装在机架2内,升降气缸可通过不限于焊接、螺栓连接、铆接等方式竖直固定在机架2内,升降气缸的活塞杆竖直朝上,并且活塞杆与机架2上滑槽21内的滑块之间为固定连接。升降气缸的稳定性好,能够安全顶升滑块并带动工件升起。
24.在本技术实施例中,第一驱动机构可采用第一气缸31,第二驱动机构可采用第二气缸41。第一气缸31远离活塞杆的一端转动连接在第一手臂3上,第一气缸31的活塞杆与第二手臂4转动连接。第二气缸41远离活塞杆的一端转动连接在第二手臂4上,第二气缸41的活塞杆与挂钩5转动连接。第一气缸31两端的转动轴、第二气缸41两端的转动轴均与第二手臂4两端的铰接轴相互平行。
25.在本技术实施例中,升降气缸、第一气缸31和第二气缸41的气路上均设有电磁阀,通过电磁阀以控制升降气缸、第一气缸31和第二气缸41的活塞杆动作。在机架2上还安装有工作台6,工作台6内设有电路,工作台6同时与升降气缸、第一气缸31和第二气缸41对应的电磁阀电连接。通过工作台6可以控制升降气缸、第一气缸31和第二气缸41所对应的电磁阀启闭,进而达到控制升降气缸、第一气缸31和第二气缸41动作的目的。
26.进一步的,在底座1的底部还设有多个滑轮7,在本技术实施例中,底座1的底部位于底座1的四角分别固定安装有一个万向轮。机架2上通过焊接固定有“c”字的握把8,工作人员通过把持握把8,可以省力快速地推动机械手臂整体运动,以将机械手臂快速推送至需要吊取工件的位置,或者将吊起的工件运输转移。
27.本技术实施例一种半自动淬火转移机械手臂的实施原理为:工作人员在将工件转移至淬火池等进行淬火工作时,通过驱使第一气缸31和第二气缸41动作,使第二手臂4上的挂钩5移动并将工件挂接,接着,移动机械手臂,以将工件移动至合适位置,再由第一手臂3在底座1上相对竖直升降,进而将工件下放入淬火溶剂中,可避免人工转运过程中的高温、负重等情况对工作人员带来的安全隐患,转运操作省力、快速。
28.实施例2
29.参照图2,实施例2与实施例1的区别之处在于,底座1上设有限位机构。
30.为了使机械手臂在吊装工件过程中保持稳定,在底座1上还设有用于限制底座1运动的限位机构。在本技术实施例中,限位机构包括支杆11、把手12和防滑支脚13,底座1上竖直贯穿开设有螺纹孔,支杆11的外壁上设有外螺纹,支杆11螺纹穿设在底座1上的螺纹孔内。支杆11的顶端位于底座1的上方,并且一体焊接固定有一字的把手12,把手12与支杆11相互垂直,支杆11的底端位于底座1的底部,并与防滑支脚13球铰接。支杆11的长度应不小于放置在地面上的底座1的高度,防滑支脚13的底部可以通过粘接橡胶层,或者增设防滑纹,以增大抓地力。
31.工作人员通过转动把手12,可以使得支杆11相对底座1向下移动,在使防滑支脚13与地面接触并将底座1轻微向上顶起后,即完成底座1在地面上的简易定位,以提高机械手臂在吊装工件过程中的稳定性。
32.本领域内的技术人员应明白,尽管已经描述了本实用新型的优选实施例,但本领域内的技术人员一旦得知了基本创造性的概念,则可对这些实施例作出另外的变更和修改。所以,所附权利要求意欲解释为包括优选实施例以及落入本实用新型范围内的所有变更和修改。显然,本领域的技术人员可以对本实用新型进行各种改动和变型而不脱离本实用新型的精神和范围。这样,倘若本实用新型的这些修改和变型属于本实用新型权利要求及其等同技术的范围之内,则本实用新型也意图包含这些改动和变型在内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1