摆动导杆式连铸结晶器非正弦振动装置
本发明涉及连续铸钢领域,特别是涉及连铸结晶器非正弦振动装置。
背景技术:
1、结晶器非正弦振动的核心是振动系统。目前连铸工业生产中,结晶器振动装置按驱动原理分主要有,液压驱动装置,伺服电动缸驱动装置及机械驱动装置。液压驱动装置虽然能实现振幅、频率和波形偏斜率等参数在线调节,但系统复杂,投资及维护费用高,易出现漏油、零飘等现象。伺服电动缸驱动装置虽然也能实现振幅、频率和波形偏斜率等参数在线调节,但伺服电机频发的正反转,影响装置的使用寿命,同时滚珠丝杠长期在局部范围内运动磨损大,影响曲线的精度。基于上述两种振动系统的特点,开发了结构简单的机械式驱动结晶器非正弦振动系统。
2、申请号为201811154147.0的专利,提出了单伺服电机双侧同步驱动结晶器非正弦振动装置。虽然该振动系统能够实现频率和波形偏斜率在线调节,振幅停机可调,但系统复杂,传动链长。申请号为201410829571.6的专利提出电动式板坯结晶器非正弦驱动装置,通过变速非圆齿轮箱实现偏心轴的变速,其只能实现一种振动波形和特定的波形偏斜率且振幅也只能停机可调。申请号为201510731298.8提出连铸结晶器摆动型双侧非正弦驱动装置,通过伺服电机和普通电机驱动差动轮系实现偏心轴的摆动,虽然实现振幅、波形偏斜率和频率的在线调节,但结构复杂,对称双机能耗大。申请号为201610305781.4的专利提出连铸结晶器非正弦振动装置,通过直齿圆柱齿轮和非圆面齿轮啮合实现偏心轴的变速,其也只能实现一种振动波形和特定的波形偏斜率且振幅也只能停机可调。专利申请号201611203383.8专利提出双伺服电机同步驱动结晶器非正弦振动装置,虽然实现波形、波形偏斜率和频率的在线调节,但振幅仍无法在线调节,限制铸坯生产率的提高。专利申请号为201910634477.8专利提出连铸结晶器双源激振装置,虽然该振动装置通过调整双伺服电机的初相位实现振幅的在线可调,但双机能耗大,且设备运行过程中相位的精确改变存在一定的困难。专利申请号为202111323700.0的专利提出振幅可调的连铸结晶器振动装置,虽然实现各参数的在线调节,但偏心轴需承受部分较大的轴向力,对零件要求较高。
3、此外,方一鸣等2014年在《仪器仪表学报》上发表的伺服电机单向旋转实现结晶器非正弦振动装置,其也只能实现频率和波形偏斜率在线可调,振幅停机可调。任廷志等2009年在《机械工程学报》上发表变距双滑块曲柄驱动结晶器非正弦振动装置,虽然实现振幅、频率和波形偏斜率在线调节,但通过齿轮箱精确调整偏心距来改变振幅存在一定的困难。
技术实现思路
1、本发明的目的是提供一种波形偏斜率、频率和振幅在线调节,可靠性高的摆动导杆驱动连铸结晶器非正弦振动装置。本发明主要是曲柄连接滑块,滑块与摆动导杆连接,通过伺服电机c、d驱动曲柄a、b的一端,伺服电机c、d匀速运动转变为导杆的变速摆动,进而导杆驱动连杆推动振动台及结晶器实现非正弦振动,通过伺服电机a、b分别连接滚珠丝杠a、b驱动移动底盘a、b实现导杆固定转动端与曲柄转动中心位置的改变,进而调节振幅和波形偏斜率。
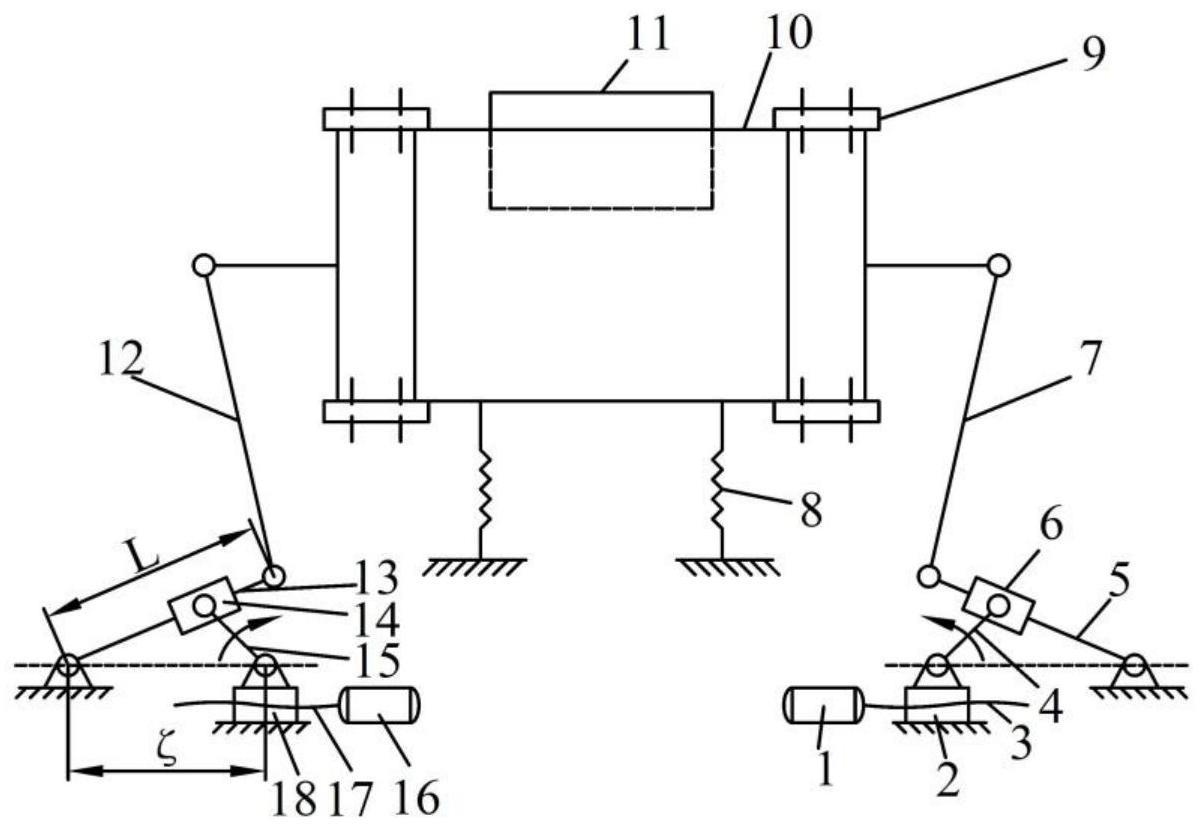
2、本发明主要包括伺服电机a、b、c、d,曲柄a、曲柄b、导杆a、导杆b,滑块a、滑块b,滚珠丝杠a、滚珠丝杠b,连杆a、连杆b、移动底盘a、移动底盘b,缓冲弹簧和导向板簧。
3、其中,伺服电机c、d的输出轴分别与曲柄a、曲柄b的一端相连,伺服电机c、d和曲柄a、b组成的结构分别固定在移动底盘a、b上,移动底盘a、b通过滚珠丝杠a、b分别与伺服电机a、b相连,曲柄a、曲柄b另一端分别与滑块a、滑块b相连,滑块a、滑块b分别安装在导杆a、导杆b上,导杆a、b的一端分别与机架形成转动副,另一端分别与连杆a、连杆b的一端铰接,内设圆柱滚子轴承,连杆a、连杆b的另一端分别与振动台铰接,同样设有圆柱滚子轴承,且对称分布。振动台为适用于板坯或方坯的箱型振动台,防止出现偏载和偏摆现象。两个导杆初相位处于水平位置,且对称分布。两曲柄反向同步运动,使得两导杆反向同步运动,以保证振动台振动过程中不出现偏摆。结晶器设在振动台上。在振动台底部固定连接缓冲弹簧,以减小振动冲击和减小伺服电机功率。振动台的两侧设有导向板簧,导向板簧沿出钢方向布置,通过导向板簧导向,保证振动台及结晶器的振动轨迹。每组导向板簧的端部与机架固接,导向板簧的中部通过螺栓与振动台的框架端部的中间相连。导向板簧中间也可断开,分别与振动台固定。曲柄匀速单方向连续转动,通过滑块驱动导杆摆动,摆动的导杆通过驱动连杆,连杆驱动振动台及其上的结晶器实现非正弦振动。摆动导杆式驱动连铸结晶器非正弦振动装置适用于直弧形连铸机。
4、本发明的工作过程大致如下:该非正弦振动机构在工作时,伺服电机c、d单向连续恒速转动,曲柄a、b单向连续恒速转动,通过滑块a、滑块b、驱动导杆a、导杆b反向同步变角速度摆动,导杆a、导杆b带动连杆a、连杆b推动振动台及其上结晶器实现非正弦振动。采用缓冲弹簧平衡振动台及结晶器等构件的重力和运动时的惯性力,振动台采用板簧导向,保证结晶器的运动轨迹。其中伺服电机驱动曲柄不同恒定转速运动,实现振动频率的在线调节;伺服电机a、b分别通过滚珠丝杠a、b,驱动移动底盘a、b,改变移动底盘a、b和导杆a、b固定铰链间的位置,即改变导杆固定转动端和曲柄固定转动端的距离,实现振幅和波形偏斜率的在线调节,满足不同钢种和不同振动工艺的要求。伺服电机恒转速转动通过电气反馈控制方法实现,即由控制人员按照伺服电机不同恒转速转动规律要求编制控制程序,通过控制器、伺服电机的驱动器,采用反馈控制方法使伺服电机c、d按照给定的恒转速转动规律反向同步转动,若调整振幅和波形偏斜率,控制伺服电机a、b角位移同步驱动移动底盘a、b运动。
5、本发明与现有技术相比具有如下优点:
6、1、振动系统结构简单、紧凑、占用空间小,投资、维护及运行费用低。
7、2、通过双导杆反向同步摆动,有效防止振动台的偏摆。适用于直弧形连铸机。
8、3、采用机械连杆式结构,提高装置承载能力、抗冲击能力及可靠性高,延长装置使用寿命。
9、4、实现振幅、波形偏斜率和频率在线调节。
10、5、本发明不但适用于新建的连铸机,而且也适用于对现有连铸机结晶器非正弦振动系统的改造。
技术特征:
1.摆动导杆式连铸结晶器非正弦振动装置,主要包括伺服电机a、b、c、d,曲柄a、曲柄b、导杆a、导杆b,滑块a、滑块b,滚珠丝杠a、滚珠丝杠b,连杆a、连杆b、移动底盘a、移动底盘b,缓冲弹簧和导向板簧,其特征在于:伺服电机c、d的输出轴分别与曲柄a、曲柄b的一端相连,伺服电机c、d和曲柄a、b组成的结构分别固定在移动底盘a、b上,移动底盘a、b通过滚珠丝杠a、b分别与伺服电机a、b相连,曲柄a、曲柄b另一端分别与滑块a、滑块b相连,滑块a、滑块b分别安装在导杆a、导杆b上,导杆a、b的一端分别与机架形成转动副,另一端分别与连杆a、连杆b的一端铰接,内设圆柱滚子轴承,连杆a、连杆b的另一端分别与振动台铰接,同样设有圆柱滚子轴承,且对称分布,振动台为适用于板坯或方坯的箱型振动台,两个曲柄初相位处于水平位置时,其对称分布,且两曲柄反向转动,结晶器设在振动台上,在振动台底部固定连接缓冲弹簧,振动台的两侧设有导向板簧,导向板簧沿出钢方向布置,通过导向板簧导向,每组导向板簧的端部与机架固接,导向板簧的中部通过螺栓与振动台的框架端部的中间相连。
2.根据权利要求1所述的摆动导杆式连铸结晶器非正弦振动装置,其特征在于:伺服电机c、d按特定的规律匀速转动,同时驱动两曲柄a、b按特定的均角速度规律转动,匀速转动的曲柄a、b分别通过滑块a、b,使得导杆a、b变速摆动,摆动的导杆驱动振动台及其上的结晶器实现非正弦振动。
3.根据权利要求1所述的摆动导杆式连铸结晶器非正弦振动装置,其特征在于:伺服电机a、b分别通过滚珠丝杠a、b驱动移动底盘a、b,改变曲柄转动中心与导杆固定转动段的距离,实现振动台波形偏斜率和振幅的调节。
4.根据权利要求1所述的摆动导杆式连铸结晶器非正弦振动装置,其特征在于:摆动导杆a、摆动导杆b对称分布。
5.根据权利要求1所述的摆动导杆式连铸结晶器非正弦振动装置,其特征在于:导向板簧也可以中间断开,分别与振动台固定。
技术总结
摆动导杆式连铸结晶器非正弦振动装置,主要包括伺服电机A、B、C、D,曲柄A、曲柄B、导杆A、导杆B,滑块A、滑块B,滚珠丝杠A、滚珠丝杠B,连杆A、连杆B、移动底盘A、移动底盘B,缓冲弹簧和导向板簧。本发明采用伺服电机C、D双侧同步驱动两个导杆A、B,使其按恒定规律匀速转动,实现结晶器非正弦振动。两根导杆同步反向转动,使得两侧横向的作用力相互抵消,有效防止振动台的偏摆。伺服电机A、B通过滚珠丝杠驱动移动底盘A、B,分别改变导杆A、B与曲柄A、B之间的距离,从而实现波形偏斜率和振幅的在线调节。本发明提出的振动装置传动可靠、承载能力大、抗冲击能力强、投资维护费用低。本振动装置能够在线调节振幅、频率和波形偏斜率,对于在线优化振动工艺参数和提高铸坯表面质量提供有效的方法。
技术研发人员:周超,曹名慧,张兴中,张强,杨超,胥家杰
受保护的技术使用者:河北农业大学
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!