一种无人机自动升降保护控制系统、方法以及车辆与流程
[0001]
本发明无人机智能操控技术领域,更具体地,涉及一种无人机自动升降保护控制系统、方法以及车辆。
背景技术:
[0002]
通常边防巡逻车在使用无人机执行任务时,需从车内将无人机拆开,操作人员下车在室外将无人机放飞执行任务,无人机执行完任务根据一键返回功能飞回车辆附近,操作人间接住无人机将其关闭后带回车内,整个操作需离开作战车辆内,到室外操作,同时接收飞回的无人机也要在室外操作,费时且易暴露在敌人攻击范围内。
[0003]
因此,本领域技术人员亟待提供一种能实现无人机自动飞出执行任务及动态返回车辆的技术方案,在保证无人机高效且顺利升降的同时,保护无人机操作人员。
技术实现要素:
[0004]
针对现有技术的以上缺陷或改进需求,本发明提供一种无人机自动升降保护控制系统、方法以及车辆。
[0005]
本发明公开了一种无人机自动升降保护控制系统,包括:
[0006]
保护罩、翻转电机、电机控制系统和用于停放无人机的底座;
[0007]
所述底座设有用于感知无人机运动状态的感知开关模组;
[0008]
所述保护罩罩设于所述底座的外侧;所述保护罩与所述翻转电机连接,以实现所述翻转电机带动所述保护罩隐藏或显露所述底座;
[0009]
所述电机控制系统包括正反转电路板、正转控制电路和反转控制电路;
[0010]
所述正转控制电路通过所述正反转电路板与所述翻转电机连接,所述反转控制电路通过所述正反转电路板与所述翻转电机连接;
[0011]
所述正转控制电路串联设有控制开关和用于感知所述保护罩正转到位的翻转限位开关模组;所述反转控制电路串联设有所述感知开关模组和用于感知所述保护罩反转到位的翻转控制开关模组;
[0012]
当所述正转控制电路处于导通状态时,所述反转控制电路处于断开状态,所述翻转电机带动所述保护罩正转以显露所述底座;
[0013]
当所述反转控制电路处于导通状态时,所述正转控制电路处于断开状态,所述翻转电机带动所述保护罩反转以隐藏所述底座。
[0014]
可选地,所述正转控制电路串联设有打开指示灯;和/或,所述反转控制电路串联设有关闭指示灯;和/或,所述感知开关模组为延迟开关模组。
[0015]
可选地,所述底座设有远程定位模组和近程精准定位模组。
[0016]
可选地,所述底座设有底座设有用于磁吸无人机的磁吸组件,防止无人机在所述底座窜动。
[0017]
可选地,所述保护罩靠近无人机一侧的内侧壁设有弹性层。
[0018]
可选地,所述无人机设有一个以上用于启闭所述无人机的压力传感器;当所述保护罩将所述无人机罩设于所述底座时,所述压力传感器感知压力,所述无人机处于电路断开状态;当所述压力传感器未感知压力时,所述无人机处于电路连通状态。
[0019]
可选地,所述保护罩包括转轴、罩柄和用于罩设所述底座的罩壳;所述罩壳包括面板和围板,所述围板周设于所述面板的外周侧,以使所述罩壳呈槽状结构;所述罩柄包括连接板和轴接板,所述连接板与所述面板连接,所述轴接板与所述围板圆滑过渡,使得所述轴接板和所述围板于所述面板和所述连接板的连接处形成通道;两个所述轴接板相对设置于所述连接板的两侧;两个所述轴接板远离所述面板一侧的端部轴接所述转轴;所述转轴与所述翻转电机连接;所述正反转电路板容设于两个轴接板之间并与所述连接板连接;所述转轴的两端设有螺纹段,所述转轴靠近所述螺纹段一侧的轴段设有凸台;所述凸台与所述轴接板的内侧壁抵接,所述螺纹段贯穿所述轴接板后与螺母螺接以实现所述转轴与所述罩柄固接。
[0020]
本发明还公开了一种无人机自动升降保护控制方法,其适用于上述任意一项所述的无人机自动升降保护系统,包括步骤:
[0021]
s1,需启动无人机执行飞行任务时,保护罩远离翻转限位开关模组,翻转限位开关模组处于闭合状态,打开控制开关,使得正转控制电路处于导通状态,正反转电路板的电流方向使翻转电机带动保护罩正转以实现保护罩显露底座;保护罩正转远离翻转控制开关模组,翻转控制开关模组由断开状态转换成闭合状态;保护罩正转并触发翻转限位开关模组时,翻转限位开关模组由闭合状态转换成断开状态,使得正转控制电路处于断开状态,翻转电机停止转动,保护罩静止;关闭控制开关;
[0022]
s2,无人机由底座起飞以执行飞行任务时,感知开关模组感知到无人机切换运动状态,感知开关模组由断开状态转换成闭合状态,使得反转控制电路处于导通状态,正反转电路板的电流方向使翻转电机带动保护罩反转以实现保护罩罩设底座,保护罩反转并远离翻转限位开关模组时,翻转限位开关模组由断开状态转换成闭合状态;保护罩反转并触发翻转控制开关模组时,翻转控制开关模组由闭合状态转换成断开状态,使得反转控制电路处于断开状态,翻转电机停止转动,保护罩静止;
[0023]
s3,无人机飞离底座时,感知开关模组未感知到无人机切换运动状态时,感知开关模组由闭合状态转换成断开状态;
[0024]
s4,无人机执行飞行任务后要返回底座时,打开控制开关,使得正转控制电路处于导通状态,正反转电路板的电流方向使翻转电机带动保护罩正转以实现保护罩显露底座,保护罩正转并远离翻转控制开关模组时,翻转控制开关模组由断开状态转换成闭合状态;保护罩正转并触发翻转限位开关模组时,翻转限位开关模组由闭合状态转换成断开状态,使得正转控制电路处于断开状态,翻转电机停止转动,保护罩静止;关闭控制开关;
[0025]
s5,无人机返回底座时,感知开关模组感知到无人机切换运动状态,感知开关模组由断开状态转换成闭合状态,使得反转控制电路处于导通状态,正反转电路板的电流方向使翻转电机带动保护罩反转以实现保护罩罩设底座,保护罩反转并远离翻转限位开关模组时,翻转限位开关模组由断开状态转换成闭合状态;保护罩反转并触发翻转控制开关模组时,翻转控制开关模组由闭合状态转换成断开状态,使得反转控制电路处于断开状态,翻转电机停止转动,保护罩静止;
[0026]
s6,无人机停留底座时,感知开关模组未感知到无人机切换运动状态时,感知开关模组由闭合状态转换成断开状态。
[0027]
本发明还公开了一种无人机自动升降保护控制方法,其适用于上述任意一项所述的无人机自动升降保护系统,包括步骤:
[0028]
s01,需启动无人机执行飞行任务时,保护罩远离翻转限位开关模组,翻转限位开关模组处于闭合状态,打开控制开关,使得正转控制电路处于导通状态,正反转电路板的电流方向使翻转电机带动保护罩正转以实现保护罩显露底座;保护罩正转远离翻转控制开关模组,翻转控制开关模组由断开状态转换成闭合状态;保护罩正转并触发翻转限位开关模组时,翻转限位开关模组由闭合状态转换成断开状态,使得正转控制电路处于断开状态,翻转电机停止转动,保护罩静止;关闭控制开关;
[0029]
s02,无人机由底座起飞以执行飞行任务时,感知开关模组感知到无人机切换运动状态,感知开关模组由闭合状态转换成断开状态;使得反转控制电路处于断开状态;
[0030]
s03,无人机返回底座时,感知开关模组感知到无人机切换运动状态,感知开关模组由断开状态转换成闭合状态,使得反转控制电路处于导通状态,正反转电路板的电流方向使翻转电机带动保护罩反转以实现保护罩罩设底座,保护罩反转并远离翻转限位开关模组时,翻转限位开关模组由断开状态转换成闭合状态;保护罩反转并触发翻转控制开关模组时,翻转控制开关模组由闭合状态转换成断开状态,使得反转控制电路处于断开状态,翻转电机停止转动,保护罩静止。
[0031]
本发明还公开了一种车辆,包括:车辆本体以及上述任意一项所述的无人机自动升降保护控制系统,保护罩、翻转电机、底座、翻转限位开关模组以及翻转控制开关模组均设置于车辆本体的顶部,控制开关设置于车辆本体的驾驶室。
[0032]
总体而言,通过本发明所构思的以上技术方案与现有技术相比,能够取得下列有益效果:
[0033]
1、实现无人机的起飞与回落等操作全过程在车内进行,实现车内控制无人机执行飞行任务,全程自动化和智能化高,同时有效保证边防巡逻人员安全,节省了操作人员放飞和接收无人机并安置的时间,缩短了无人机执行飞行任务所需时间以及车辆等设置本控制系统的设备的暴露时间,安全性高且使用便捷、易于实现。更优的,保护罩在无人机在未执行飞行任务时可有效保护其不受雨淋日晒或树枝剐蹭,还可进一步放置其被盗,使用安全性高。
[0034]
2、无人机能根据一键返回功能并通过远程定位模组和近程定位模组实现其精准落在底座上;更优的,还进一步通过磁吸组件吸附无人机以使无人机稳固于底座,使得无人机停靠更为稳定和顺利。
[0035]
3、整个无人机执行飞行任务可有驾驶员单人操作,同时可在车辆等设置本控制系统的设备移动过程中接收无人机的返回,应用场景广泛。
附图说明
[0036]
图1为本发明的无人机自动升降保护控制系统的一种实施例结构示意图;
[0037]
图2为本发明的无人机自动升降保护控制系统的另一种实施例的一种工作状态结构示意图;
[0038]
图3为本发明的无人机自动升降保护控制系统的另一种实施例的另一种工作状态结构示意图;
[0039]
图4为本发明的保护罩的一种实施例结构示意图;
[0040]
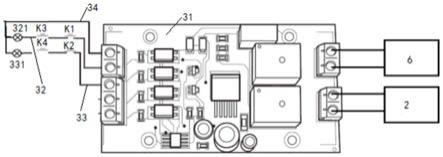
图5为本发明的正反转电路板的一种实施例结构示意图;
[0041]
图6为适用于本发明的一种无人机结构示意图。
[0042]
在所有附图中,同样的附图标记表示相同的技术特征,具体为:1-保护罩、11-转轴、111-螺纹段、112-凸台、12-罩柄、121-连接板、122-轴接板、13-罩壳、131-面板、132-围板、133-抵接部、14-螺母、2-翻转电机、21-电机支架、31-正反转电路板、311-电源接口一、312-电源接口二、313-公共接口、314-正转开关、315-反转开关、316-电机接口一、317-电机接口二、32-正转控制电路、321-打开指示灯、33-反转控制电路、331-关闭指示灯、34-公共电路、4-底座、41-停放位、5-车顶、6-电源、7-无人机、71-压力传感器、72-左视觉系统、73-右视觉系统、74-后视觉系统、75-红外传感器、k1-控制开关、k2-感知开关模组、k3-翻转限位开关模组、k4-翻转控制开关模组。
具体实施方式
[0043]
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。此外,下面所描述的本发明各个实施方式中所涉及到的技术特征只要彼此之间未构成冲突就可以相互组合。为了便于说明,本文的正转和反转是翻转电机可以有两种相反的转动,并不是对翻转电机转动的转向的限定,应以本领域技术人员理解为准。
[0044]
在本发明的一种实施例中,如图1-6所示,一种无人机自动升降保护控制系统,包括:保护罩1、翻转电机2、电机控制系统和用于停放无人机7的底座4;底座4设有用于感知无人机7的感知开关模组k2;保护罩1罩设于底座4的外侧;保护罩1与翻转电机2连接,以实现翻转电机2带动保护罩1隐藏或显露底座4;电机控制系统包括正反转电路板31、正转控制电路32和反转控制电路33;正转控制电路32通过正反转电路板31与翻转电机2连接,反转控制电路33通过正反转电路板31与翻转电机2连接;正转控制电路32串联设有控制开关k1和用于感知保护罩1正转到位的翻转限位开关模组k3;反转控制电路33串联设有感知开关模组k2和用于感知保护罩1反转到位的翻转控制开关模组k4;当正转控制电路32处于导通状态时,反转控制电路33处于断开状态,翻转电机2带动保护罩1正转以显露底座4;当反转控制电路33处于导通状态时,正转控制电路32处于断开状态,翻转电机2带动保护罩1反转以隐藏底座4。
[0045]
值得说明的是,感知开关模组k2、翻转限位开关模组k3和翻转控制开关模组k4可为压力感应开关模组、接近开关模组、光电开关模组、图像开关模组等中的一种或多种均可。在实际应用中,保护罩1在无人机2飞离底座4时可有两种状态,一种是保护罩1在无人机2飞离底座4去执行飞行任务时,保护罩1可始终处于打开状态直至无人机2飞回并停留底座4后再罩设底座4,进而实现无人机2和底座4的隐藏;另一种是保护罩1在无人机2飞离底座4去执行飞行任务时,保护罩1反转重新再次罩设底座4,直至无人机2需要飞回时再正转显露底座4,且在无人机停留底座4后再罩设底座4,进而实现无人机2和底座4的隐藏。
[0046]
示例性的,当开关(感知开关模组k2、翻转限位开关模组k3和翻转控制开关模组
k4)为压力感应开关模组时,则感知开关模组k2优选设置于底座4,当无人机7停放于底座4时,无人机7压在感知开关模组k2上,感知开关模组k2感知到无人机7,则感知开关模组k2处于断开状态;当无人机7起飞去执行飞行任务时,此时,无人机7远离感知开关模组k2,感知开关模组k2无法感知到无人机7,则感知开关模组k2处于闭合状态。翻转限位开关模组k3设置于保护罩1正转至至少能够实现无人机7起飞时,翻转限位开关模组k3能被保护罩1压住的位置,当翻转限位开关模组k3未被正转后的保护罩1压住时,则翻转限位开关模组k3处于闭合状态,当翻转限位开关模组k3被正转后的保护罩1压住时,则翻转限位开关模组k3处于断开状态。翻转控制开关模组k4设置于保护罩1反转至至少能够实现无人机7停放时,翻转控制开关模组k4能被保护罩1压住的位置,当翻转控制开关模组k4未被正转后的保护罩1压住时,则翻转控制开关模组k4处于闭合状态,当翻转控制开关模组k4被正转后的保护罩1压住时,则翻转控制开关模组k4处于断开状态。当然,当开关为其他种类的开关时,其安装位置应以实现其功能为准,这里不再赘述了。
[0047]
可选地,正转控制电路32串联设有打开指示灯321,当正转控制电路32处于导通状态时,打开指示灯321亮起;当正转控制电路32处于断开状态时,打开指示灯321变暗;从而实现通过视觉直观判断保护罩1正转或反转状态以及正转反转的过程时间的判定。
[0048]
可选地,反转控制电路33串联设有关闭指示灯331,当反转控制电路33处于导通状态时,关闭指示灯331亮起;当反转控制电路33处于断开状态时,关闭指示灯331变暗;从而实现通过视觉直观判断保护罩1正转或反转状态以及正转反转的过程时间的判定。
[0049]
可选地,感知开关模组k2为延迟开关模组。感知开关模组k2带有延迟功能(时间长短可调节,具体根据实际需要进行设置,示例性的,延迟视觉设定为10秒,无人机7起飞的10秒时间后,感知开关模组k2才由断开状态切换成闭合状态,有效降低保护罩1过早关闭可能会触碰迟飞的无人机7的可能性)。感知开关模组k2的延迟功能可通过延时电路和/或图像传感器与开关模组配合使用实现。示例性的,当感知开关模组k2为图像传感器和开关模组配合构成时,其中,当图像传感器拍摄到无人机7在底座4停留状态和飞离状态切换的图像时,则可根据预先设定的规则来控制开关模组进行对应的断开状态和闭合状态的切换,如当无人机7需要执行飞行任务时,翻转电机2正转打开保护罩1后,无人机7飞离底座4时将由停留状态切换成飞离状态,此时,图像传感器根据前后采集到的无人机7停留状态的图像和无人机7飞离状态的图像给予开关模组一个信号使其呈闭合状态,则此时反转控制电路33处于导通状态,正转控制电路32处于断开状态,翻转电机2带动保护罩1反转以隐藏底座4;当无人机7飞行任务执行完成后需要返回时,翻转电机2正转打开保护罩1后,无人机7停留底座4时将由飞离状态切换成停留状态,此时,图像传感器根据前后采集到的无人机7停留状态的图像和无人机7分离状态的图像给予开关模组一个信号使其呈闭合状态,则此时反转控制电路33处于导通状态,正转控制电路32处于断开状态,翻转电机2带动保护罩1反转以隐藏底座4。优选地,为了保证翻转电机2是在无人机7完全停留好后或完全飞离好后再进行隐藏底座4或罩设底座4动作,可通过延时电路或运算逻辑实现感知开关模组k2的延迟功能,这里不再描述。
[0050]
可选地,底座4设有远程定位模组和近程定位模组。在实际应用中,远程定位模组可为gps定位模组、北斗定位模组、glonass定位模组、galileo定位模组等能够远距离实现无人机7通过远程定位模组实时定位且使安装本发明的移动设备(如车辆)在移动过程中能
实现一键返回功能,同时通过近程定位模组实现无人机7精准降落在底座4上,在实际应用中,近程定位模组可为红外传感器75、激光传感器、图像传感器等可实现近距离定位的传感器模组均可,确保无人机7能够精准停靠在底座4,从而保证保护罩1对无人机7的扣合,在实际应用中,保护罩1优选根据近程定位模组的精度进行适应性的调整,以确保保护罩1能够罩设无人机7,保证本发明运行的可靠性和稳定性。
[0051]
可选地,底座4设有用于磁吸无人机7的磁吸组件。通过磁吸组件将无人机7固定住在底座4,提高无人机7于底座4的稳固性,避免无人机7在移动设备停放时因固定不稳而出现晃动、磕碰等不良现象,提高了本发明运行的可靠性和稳定性。
[0052]
可选地,保护罩1靠近无人机7一侧的内侧壁设有弹性层。通过弹性层吸收无人机7因移动设备颠簸而出现的振动、晃动,从而保护无人机7,延长无人机7的使用寿命。在实际应用中,弹性层可为海绵、泡棉、塑胶、泡沫或设置有弹簧的抵接组件等具有弹性形变且能恢复的部件或组件,具体可根据实际需要进行设置。
[0053]
可选地,无人机7设有一个以上用于启闭无人机7的压力传感器71;当保护罩1将无人机7罩设于底座4时,压力传感器71感知压力,无人机7处于关闭状态;当压力传感器71未感知压力时,无人机7处于启动状态。具体地,压力传感器71用于控制无人机7的启闭,当压力传感器71感受到压力时,则无人机7处于关闭状态,当压力传感器71感受到压力时,则无人机7开始启动,为后续执行飞行任务起飞做准备。具体地,压力传感器71可对应弹性层进行设置,从而确保压力传感器71能在轻压的情况下,实现对无人机7开关电路的导通或断开的控制。值得说明的是,当压力传感器71设置于无人机7的底部时,感知开关模组k2的通断还可通过压力传感器71进行控制,当压力传感器71因无人机7处于飞离状态时,则压力传感器71可给一个信号给感知开关模组k2,使其处于闭合状态而实现保护罩1在无人机7飞离底座4后反转回来罩设底座4,当压力传感器71因无人机7停留在底座4而给感知开关模组k2一个信号,使其处于闭合状态而实现保护罩1在无人机7停靠底座4后反转回来罩设底座4。
[0054]
可选地,保护罩1包括转轴11、罩柄12和用于罩设底座4的罩壳13;罩壳13包括面板131和围板132,围板132周设于面板131的外周侧,以使罩壳13呈槽状结构;罩柄12包括连接板121和轴接板122,连接板121与面板131连接,轴接板122与围板132圆滑过渡,使得轴接板122和围板132于面板131和连接板121的连接处形成通道;两个轴接板122相对设置于连接板121的两侧;两个轴接板122远离面板131一侧的端部轴接转轴11;转轴11与翻转电机2连接;正反转电路板31容设于两个轴接板122之间并与连接板121连接;转轴11的两端设有螺纹段111,转轴11靠近螺纹段111一侧的轴段设有凸台112;凸台112与轴接板122的内侧壁抵接,螺纹段111贯穿轴接板122后与螺母14螺接以实现转轴11与罩柄12固接。优选地,翻转电机2通过电机支架21安装于移动设备上,更优的,保护罩1通过转轴11与翻转电机2连接,进而通过单机支架安装于移动设备上。当然,在本发明的另一实施例中,保护罩1也可通过轴座转动安装于移动设备上。优选地,围板132正对着翻转控制开关模组k4设有抵接部133。
[0055]
可选地,底座4直接或通过支架安装于移动设备的顶部,且底座4对应无人机7设有停放位41,磁吸组件优选设置于停放位41,感知开关模组k2根据其自身特性进行设置,以能感知无人机7为准。
[0056]
可选地,正反转电路板31包括电路板主体,电路板主体对应设有用于与车载电源等电源6电连接的电源接口一311和电源接口二312;用于与电机电机的电机接口一316和电
机接口二317;用于与正转控制电路32连接的正转开关314和公共接口313;以及用于与反转控制电路33连接的反转开关315和公共接口313;值得说明的是,与正转控制电路32连接的公共接口313和与反转控制电路33连接的公共接口313优选为同一公共接口313,即正转控制电路32和反转控制电路33并联后与公共接口313通过公共电路34串联后接入电路板主体。
[0057]
本发明还公开了一种无人机自动升降保护控制方法,其适用于上述任意一项的无人机自动升降保护系统,包括步骤:
[0058]
s1,需启动无人机执行飞行任务时,保护罩远离翻转限位开关模组,翻转限位开关模组处于闭合状态,打开控制开关,使得正转控制电路处于导通状态,正反转电路板的电流方向使翻转电机带动保护罩正转以实现保护罩显露底座;保护罩正转远离翻转控制开关模组,翻转控制开关模组由断开状态转换成闭合状态;保护罩正转并触发翻转限位开关模组时,翻转限位开关模组由闭合状态转换成断开状态,使得正转控制电路处于断开状态,翻转电机停止转动,保护罩静止;关闭控制开关;
[0059]
s2,无人机由底座起飞以执行飞行任务时,感知开关模组感知到无人机切换运动状态,感知开关模组由断开状态转换成闭合状态,使得反转控制电路处于导通状态,正反转电路板的电流方向使翻转电机带动保护罩反转以实现保护罩罩设底座,保护罩反转并远离翻转限位开关模组时,翻转限位开关模组由断开状态转换成闭合状态;保护罩反转并触发翻转控制开关模组时,翻转控制开关模组由闭合状态转换成断开状态,使得反转控制电路处于断开状态,翻转电机停止转动,保护罩静止;
[0060]
s3,无人机飞离底座时,感知开关模组未感知到无人机切换运动状态时,感知开关模组由闭合状态转换成断开状态;
[0061]
s4,无人机执行飞行任务后要返回底座时,打开控制开关,使得正转控制电路处于导通状态,正反转电路板的电流方向使翻转电机带动保护罩正转以实现保护罩显露底座,保护罩正转并远离翻转控制开关模组时,翻转控制开关模组由断开状态转换成闭合状态;保护罩正转并触发翻转限位开关模组时,翻转限位开关模组由闭合状态转换成断开状态,使得正转控制电路处于断开状态,翻转电机停止转动,保护罩静止;关闭控制开关;
[0062]
s5,无人机返回底座时,感知开关模组感知到无人机切换运动状态,感知开关模组由断开状态转换成闭合状态,使得反转控制电路处于导通状态,正反转电路板的电流方向使翻转电机带动保护罩反转以实现保护罩罩设底座,保护罩反转并远离翻转限位开关模组时,翻转限位开关模组由断开状态转换成闭合状态;保护罩反转并触发翻转控制开关模组时,翻转控制开关模组由闭合状态转换成断开状态,使得反转控制电路处于断开状态,翻转电机停止转动,保护罩静止;
[0063]
s6,无人机停留底座时,感知开关模组未感知到无人机切换运动状态时,感知开关模组由闭合状态转换成断开状态。
[0064]
进一步地,当无人机执行完飞行任务返回时,开启无人机一键返回功能,无人机通过远程定位模组和近程定位模组,随车移动发射的远程定位信号帮助无人机远距离返回,近程定位模组的近程信号帮助无人机实现精准降落在底座,且底座通过磁吸组件将无人机固定住,此过程中由于感知开关模组(因为延迟功能)和翻转控制开关模组还处于闭合状态,反转控制电路处于导通状态,正反转电路板的电流方向使翻转电机反转以实现保护罩
罩设底座,当保护罩翻转并触发翻转控制开关模组时,翻转控制开关模组由闭合状态转换成断开状态,使得反转控制电路处于断开状态,翻转电机停止转动,保护罩静止,同时感知开关模组感知到无人机且延迟到指定时间,感知开关模组由闭合状态转换成断开状态。同时,在保护罩罩设无人机过程中,无人机上的压力传感器受到压力而关闭无人机的电源,使得无人机停机运行。当然,当保护罩远离无人机时,无人机上的压力传感器因保护罩的撤离而不再感受压力时,无人机的电源将自动开启,无人机便可实现自动起飞并执行飞行任务了。当然,当底座设置磁吸组件时,无人机在起飞时还会克服磁吸组件的磁吸力。这里不再赘述了。
[0065]
本发明还公开了一种无人机自动升降保护控制方法,其适用于上述任意一项的无人机自动升降保护系统,包括步骤:
[0066]
s01,需启动无人机执行飞行任务时,保护罩远离翻转限位开关模组,翻转限位开关模组处于闭合状态,打开控制开关,使得正转控制电路处于导通状态,正反转电路板的电流方向使翻转电机带动保护罩正转以实现保护罩显露底座;保护罩正转远离翻转控制开关模组,翻转控制开关模组由断开状态转换成闭合状态;保护罩正转并触发翻转限位开关模组时,翻转限位开关模组由闭合状态转换成断开状态,使得正转控制电路处于断开状态,翻转电机停止转动,保护罩静止;关闭控制开关;
[0067]
s02,无人机由底座起飞以执行飞行任务时,感知开关模组感知到无人机切换运动状态,感知开关模组由闭合状态转换成断开状态;使得反转控制电路处于断开状态;
[0068]
s03,无人机返回底座时,感知开关模组感知到无人机切换运动状态,感知开关模组由断开状态转换成闭合状态,使得反转控制电路处于导通状态,正反转电路板的电流方向使翻转电机带动保护罩反转以实现保护罩罩设底座,保护罩反转并远离翻转限位开关模组时,翻转限位开关模组由断开状态转换成闭合状态;保护罩反转并触发翻转控制开关模组时,翻转控制开关模组由闭合状态转换成断开状态,使得反转控制电路处于断开状态,翻转电机停止转动,保护罩静止。
[0069]
本发明还公开了一种车辆,包括:车辆本体以及上述任意一项的无人机自动升降保护控制系统,保护罩1、翻转电机2、底座4、翻转限位开关模组k3以及翻转控制开关模组k4均设置于车辆本体的顶部,控制开关k1设置于车辆本体的驾驶室。
[0070]
示例性的,一种车辆,无人机自动升降保护控制系统设置于车辆本体的车顶5,无人机7的顶部或顶部设有压力传感器71,且无人机7的左右两侧以及后端分别设置有左视觉系统72、右视觉系统73和后视觉系统74,无人机7上还设有红外传感器75。其中,控制开关k1布置在车辆本体的驾驶室内,为普通的翘板开关,有开和关两个功能;底座4能时时发射gps信号及红外信号,用于给无人机7定位使用,正反转电路板31使用车载电源,驾驶室设置有gps信号及红外信号的通路控制开关;底座4上设置的感知开关模组k2为压力开关,无人机7压在上面,压力开关断开,无人机7离开,压力开关闭合接通电路。感知开关模组k2带有延迟功能(时间长短可调节,通常时间设定10秒,无人机7起飞的10秒时间后,电路开关接通,有效延迟保护罩1关闭可能触碰迟飞的无人机7的可能性),底座4具有磁吸功能,待无人机7落在底座4上时,能将无人机7吸附住,防止无人机7自由移动。翻转限位开关模组k3为常接通状态,当控制开关k1打开,电路接通,保护罩1开始正转翻转打开,当保护罩1翻转触碰到翻转限位开关模组k3,翻转限位开关模组k3断开,翻转电路断开,停止翻转。翻转控制开关模
组k4为常接通状态,当无人机7落在感知开关模组k2上,底座4上的压力开关闭合电路,电路接通,保护罩1开始反转盖住无人机7,当保护罩1翻转触碰到翻转控制开关模组k4,压力开关断开,反转电路断开,停止翻转。打开指示灯321设置在驾驶室内,在控制开关k1打开后,无人机7外出执行飞行任务,保护罩1翻转至翻转限位开关模组k3过程中,打开指示灯321点亮,翻转结束,指示灯熄灭,关闭控制开关k1。这时可操作无人机7执行飞行任务。关闭指示灯331也设置在驾驶室内,无人机7外出执行飞行任务,保护罩1在翻转限位开关模组k3接通过程中,翻转罩盖回,关闭指示灯331点亮,待触碰翻转控制开关模组k4,翻转结束,关闭指示灯331熄灭。正反转电路板31通过两个回路实现翻转电机2正反转动,带动保护罩1开启与关闭。正反转电路板31固定在保护罩1内,整个电路连接车辆提供的24v电源。
[0071]
无人机7在正常状态下,无人机7的触碰开关是接通状态,当无人机7返回底座4,保护罩1闭合,盖在无人机7上,这时无人机7上的两个压力传感器71任意一个被保护罩1压住,无人机7电路断开。无人机7在保护罩1未开启状态下,无人机7不能展开启动的。螺母14将翻转电机2与保护罩1压紧,实现翻转电机2带动保护罩1转动。翻转电机2两端为螺纹结构,翻转电机2两端中间部分各有一个凸台112,螺母14通过螺纹将保护罩1压紧在凸台112上,实现一体运动。电机支架21,将翻转电机2固定在车顶5。保护罩1内部带有软硬合适的不规则海绵,能轻压及束缚无人机7,使其压力开关断开电路连接。
[0072]
实际应用中,具体实施方式如下:
[0073]
关闭驾驶室内的控制开关k1,将无人机7放置在底座4,感知开关模组k2和翻转限位开关模组k3均处于断开状态,保护罩1为罩住无人机7状态。
[0074]
当需启动无人机7执行飞行任务时,将驾驶室内的控制开关k1打开,控制开关k1的电路接通,正反转电路板31中的电流方向使翻转电机2逆时针(即上文的正转)转动,保护罩1逆时针转动,同时翻转罩打开打开指示灯321点亮,无人机7顶置开关接通,当保护罩1转动到触碰翻转限位开关模组k3,翻转限位开关模组k3断开,翻转电机2停止转动,保护罩1静止,翻转罩打开打开指示灯321熄灭,关闭控制开关k1。开启无人机7遥控电源,执行飞行任务。底座4的压力开关压力解除,开关闭合,正反转电路板31中的电流方向使翻转电机2顺时针(即上文的反转)转动,保护罩1顺时针转动,同时翻转罩打开关闭指示灯331点亮,当保护罩1转动到触碰翻转控制开关模组k4,翻转控制开关模组k4断开,翻转电机2停止转动,保护罩1静止,翻转罩打开关闭指示灯331熄灭。
[0075]
当无人机7执行飞行任务完成时,重复步骤s1,保护罩1打开,控制开关k1,开启无人机7一键返航功能(在实际应用中,无人机7一键返航功能在无人机7在外执行飞行任务或停留在底座4时),无人机7通过底座4发射的gps信号及短距离的红外信号,随车移动发射的gps信号帮助无人机7远距离返回,短距离的红外信号帮助无人机7实现精准降落在底座4,底座4通过磁吸功能将无人机7固定住,这时感知开关模组k2还处于闭合状态(延迟功能),正反转电路板31中的电流方向使翻转电机2顺时针转动,保护罩1顺时针转动,同时翻转罩打开关闭指示灯331点亮,当保护罩1转动到触碰翻转控制开关模组k4,翻转控制开关模组k4断开,翻转电机2停止转动,保护罩1静止,翻转罩打开关闭指示灯331熄灭,无人机7被保护罩1盖住,完成了无人机7的存放于固定,同时无人机7顶置开关断开,电路不会漏电,保持续航能力。
[0076]
通过在车辆的车顶5设置一个带压力传感器71的底座4,底座4能发射gps信号及近
距离红外信号给无人机7,底座4带有磁吸功能,能将飞回落在车顶5的无人机7吸住;一个可实现电动翻转的保护罩1,保护罩1内部有适应无人机7外形的减震海绵等软包装,无人机7顶部设置有压力传感器71,无人机7内部设置有gps信号及红外接收器实现一键返回的精准定位。无人机7根据远距离的gps信号及近距离的红外信号精准飞回落在车顶5的底座4上,底座4上的压力传感器71感受到压力信号,接通电机控制系统,保护罩1盖住无人机7,同时给无人机7一个适中的压力,无人机7压力开关断开,无人机7断电;保护罩1通过翻转电机2实现正反翻转,正反翻转通过一个常用的电路板实现电流正反输出;在无人机7起飞时,先打开驾驶室内的保护罩1开启开关,保护罩1通过翻转电机2打开,无人机7的压力传感器71压力信号消失,无人机7电源自动接通,这时可以操作无人机7执行飞行任务,无人机7起飞启动后,克服底座4的磁吸力脱离底座4,无人机7顶部的压力传感器71在保护罩1未开启时,无人机7电路断开,避免保护罩1未打开,无人机7升降飞行装置展开而被保护罩1破坏。保护罩1在无人机7不使用及停放时期可有效保护无人机7不受雨淋或树枝剐蹭。
[0077]
本领域的技术人员容易理解,以上所述仅为本发明的较佳实施例而已,并不用于限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1